















































软件

产品


仿真流程
1、前处理
1.1 几何模型构建
1.2 材料定义
1.3 动力学系统构建
2、求解
2.1 驱动条件
2.2 求解设定
3、后处理
3.1 仿真动画
3.2结果曲线
1、前处理
1.1 几何模型构建:利用自带建模功能建立两个六面体模型。如图1所示。
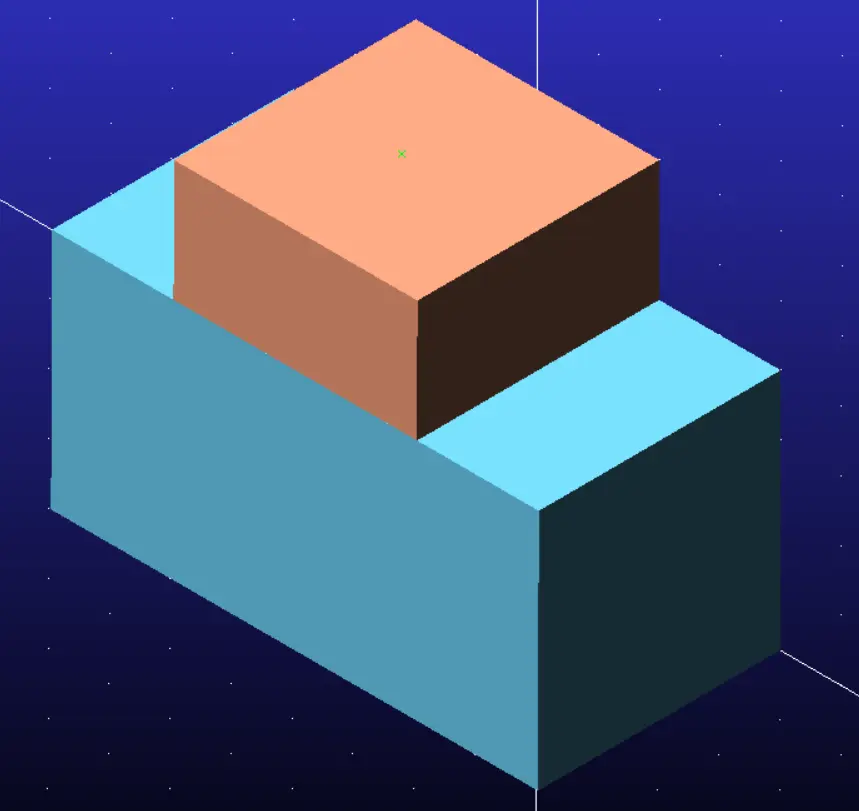
图1 几何模型
1.2 材料定义:使用Adams默认材料。
1.3 动力学系统构建:建立PART_2与大地的固定副,PART_3与PART_2之间的固定副。
2、求解
2.1驱动条件:在PART_3定义单向力,大小为STEP( time , 0 , 0 , 1 , 2000 )
2.1.1传感器的定义:在Design Exploration中找到Create a new Sensor创建传感器,设定如图2所示。
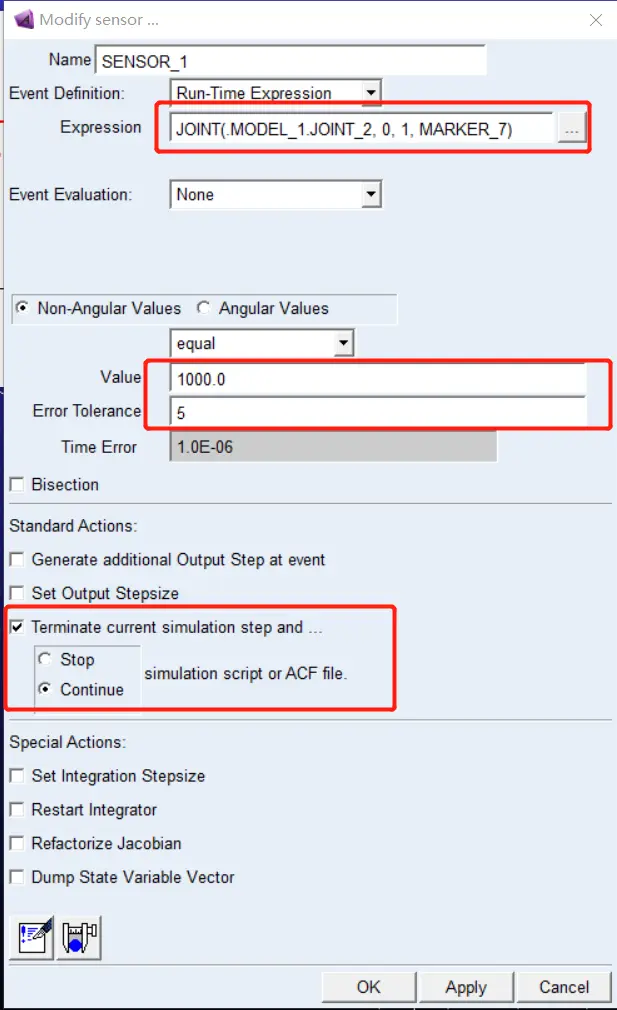
图2 传感器定义
2.2 求解设定:定义脚本仿真,如图3所示,点击开始求解。
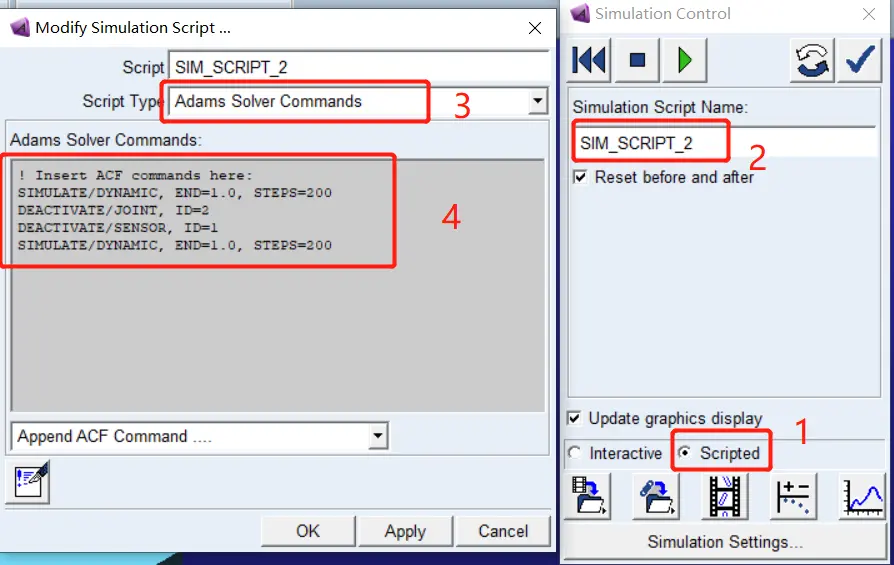
图3 求解设定
3、后处理
3.1 仿真动画:求解完成后可以查看其仿真动画,以及固定副反力曲线,可以发现传感器在感知到约束反力为1000N时,固定副出现了失效,可以通过传感器加仿真脚本的形式实现一些不同形式的仿真。
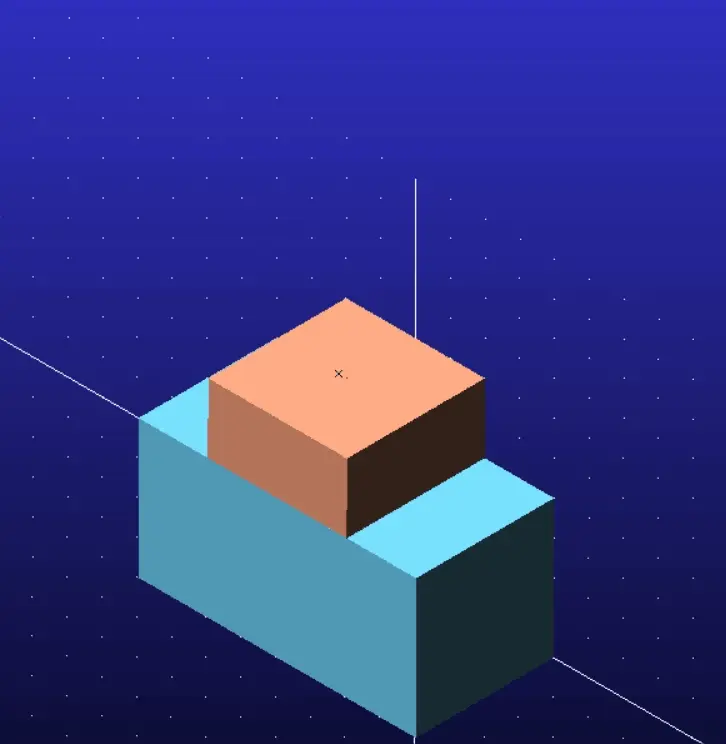
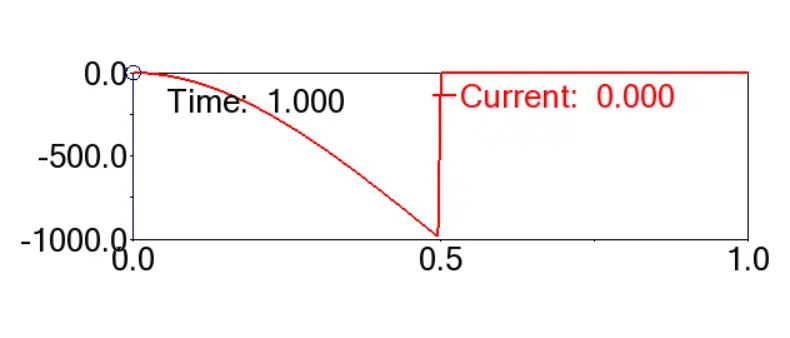
图4动画及约束反力曲线
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















