















































软件

产品



改进方案如下所示:

第一个量化公式,的范围是由一个统计范围得到的,但是在实际中,根据信道的不同,可能存在多种可能,这里,我们的考虑的方案是自适应的调整Ymax和Ymin,根据信道的大概估计结果对Ymax和Ymin进行调整,
方案如下所示:

k1为0~1之间的值。在实际中,可以加入一个噪声估计模块,对难以确定的信道白噪声进行估计。
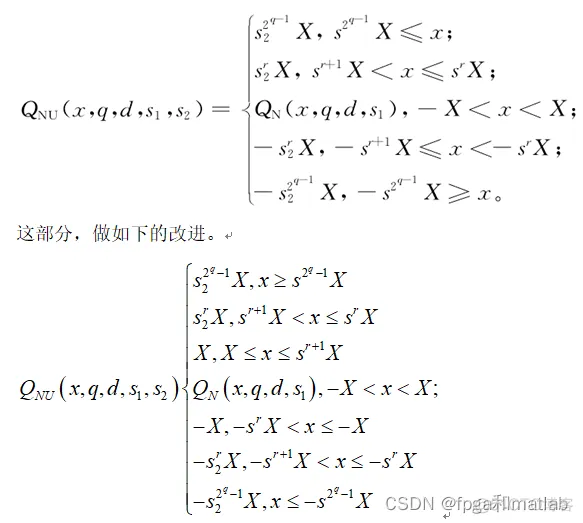
这种改进方案的思路是,当噪声越大的时候,接收到信号的幅度波动范围也就越大,因此,其置信区间并不是一个固定的范围。对于第二个量化公式,采用的改进方案如下所示:
function Q = func_QX(x);q = 2;s = 2;s1= 1.7;s2= 2;d = 0.5;N = 2^(q-1)-1;r = 4;Q = x;tmp1=0;for i = 1:N tmp1(i) = d*s1^(i-1);endX_= -sum(tmp1) + d/2;X = sum(tmp1) + d/2;if x >= s^(2^q-1)*X Q = s2^(2^q-1)*X;endif x > s^(r+1)*X & x <= s^(r)*X Q = s2^(r)*X;endif x >= X & x <= s^(r+1)*X Q = X;endif x > X_ & x < X Q = QN(x,q,d,s1,N);endif x >= s^(r)*X_ & x < X_ Q = X_;endif x >= s^(r+1)*X_ & x < s^(r)*X_ Q = s2^(r)*X_;endif x <= s^(2^q-1)*X_ Q = s2^(2^q-1)*X_;endendfunction y = QN(x,q,d,s1,N);tmp1=0;for i = 1:N tmp1(i) = d*s1^(i-1);endtmp2=0;for i = 1:N tmp2(i) = d*s1^(i-1);endA1 = sum(tmp1) - d/2;B1 = sum(tmp2) - d/2;A2 = -sum(tmp1) + d/2;B2 = -sum(tmp2) + d/2;y = x;if x >= A1 & x <= B1 y = sum(tmp2);end if x >= -d/2 & x <= d/2 y = 0;end if x >= B2 & x <= A2 y = -sum(tmp2);end end1.2.3.4.5.6.7.8.9.10.11.12.13.14.15.16.17.18.19.20.21.22.23.24.25.26.27.28.29.30.31.32.33.34.35.36.37.38.39.40.41.42.43.44.45.46.47.48.49.50.51.52.53.54.55.56.57.58.59.60.61.62.63.64.65.66.67.68.69.70.71.72.73.74.75.76.77.78.79.80.
clc;clear;close all;warning off;addpath 'func\'rng(1); %码率Rate = 13/24; %码率大于0.5,注意,码率不能任意设置的,这里可以设置为12/24~23/24Lens = 2400;%码长大于1000%量化位宽WB = 6;%WB:1%迭代次数iter = 5;%基于IEEE802.16E的QC-LDPC构造[Qc_H,Hb] = func_H(Lens,Rate);k = Rate*log2(2);[RR,CC] = size(Hb);block = Lens/CC;SNRs = [0.5:0.5:4]; Err = [];% [cycle6num,cycle8num] = func_loop_check(Qc_H);for kj = 1:length(SNRs) kj SNR = SNRs(kj)/k; sigma = sqrt(1/(2*SNR)); Ng = 0.1; ofdm_N = 256; Lf = 8; Tx_dat = round(rand(100000,1)); %导频 PN_train= [1 1 0 1 0 1 1 1 0 0]; Nfft = 8*ofdm_N; %cyclic prefix Np = round(Ng*Nfft); %LDPC Tx_dat_ldpc = []; for i = 1:floor(length(Tx_dat)/(Rate*Lens))+1 i if i <= floor(length(Tx_dat)/(Rate*Lens)) tmps = Tx_dat((i-1)*(Rate*Lens)+1:(i)*(Rate*Lens)); else tmps = [Tx_dat((i-1)*(Rate*Lens)+1:end);zeros(Lens*Rate-length(Tx_dat((i-1)*(Rate*Lens)+1:end)),1)]; end tmps_ldpc = func_ldpc_encode(tmps',Qc_H,Hb); Tx_dat_ldpc = [Tx_dat_ldpc,tmps_ldpc]; end %QPSK [mods,demods] = func_MPSK(ofdm_N,'M',4,'SymbolOrder','Gray'); %OFMD调制 y_Tx_mod = func_OFDM_mod(Tx_dat_ldpc,mods,Np,Lf,PN_train,Nfft); %发送,高斯白噪声 y_Rx = func_TRANSMITTER(y_Tx_mod,SNR); %OFMD解调 [Rx_dat,Rx_dat2] = func_OFDM_demod(y_Rx,demods,Np,Lf,PN_train,Nfft); %LDPC译码 Rx_dat_ldpc = []; for i = 1:floor(length(Rx_dat)/(Lens)) i tmps = Rx_dat((i-1)*(Lens)+1:(i)*(Lens)); tmps_deldpc = func_ldpc_decodenew([2*tmps-1]',RR,CC,block,Qc_H,sigma,iter,WB); Rx_dat_ldpc = [Rx_dat_ldpc,abs(tmps_deldpc(1:Rate*Lens)-1)]; end %计算误码率 Rx_dat_ldpcs = Rx_dat_ldpc'; bit_errors = length(find(Tx_dat(1:length(Rx_dat_ldpcs)) ~=Rx_dat_ldpcs))/length(Tx_dat); bit_errors Err = [Err,bit_errors]; clear bit_errors Rx_dat_ldpcs Rx_dat_ldpc tmps_deldpc tmps Rx_dat_ldpc Rx_dat Rx_dat2 y_Rx y_Tx_mod mods demods Tx_dat_ldpc tmps_ldpc Tx_dat_ldpc Tx_datendfigure;semilogy(SNRs,Err,'b-o');grid onxlabel('SNR');ylabel('Error');save R.mat SNRs Err1.2.3.4.5.6.7.8.9.10.11.12.13.14.15.16.17.18.19.20.21.22.23.24.25.26.27.28.29.30.31.32.33.34.35.36.37.38.39.40.41.42.43.44.45.46.47.48.49.50.51.52.53.54.55.56.57.58.59.60.61.62.63.64.65.66.67.68.69.70.71.72.73.74.75.76.77.78.79.80.81.82.83.84.85.86.87.88.89.90.91.92.
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















