软件

产品


直流电动机具有启动转矩大、控制性能优等特点。
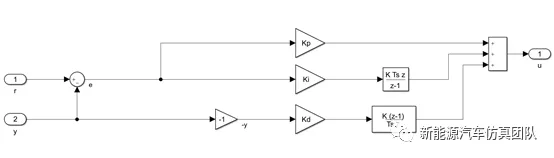
目前直流电机多采用传统的PID控制,PID控制是最早发展起来的控制策略之一。由于其具有算法简单、鲁棒性好和可靠性高等优点,被广泛应用于工业过程控制中。但PID控制适合于可建立精确数学模型的确定性控制系统。
但实际的工业过程控制系统中存在很多非线性或时变的不确定因素,使得PID控制器的参数整定过程繁琐。控制效果也因此而受影响。近些年来。随着现代控制理论、智能控制和计算机技术的飞速发展。出现了很多新型的控制系统。模糊控制就是其中之一。本期带来基于模糊PID的直流电机Simulink模型的搭建。
1、模糊控制
模糊控制作为目前最具实际意义的智能控制方法之一,以模糊集合论、模糊语言变量及模糊逻辑推理为基础。实现一步模糊控制算法的过程:获取被控制量的精确值。将此量与给定值比较得到误差信号,一般选误差信号作为模糊控制器的一个输入量。把误差信号的精确量进行模糊化变成模糊量。误差的模糊量可用相应的模糊语言表示,得到误差的模糊语言集合的一个子集(一个模糊矢量),再由误差和模糊控制规则(模糊算子)根据推理的合成规则进行模糊决策,得到模糊控制量。
2、基于模糊控制的转速调节器设计
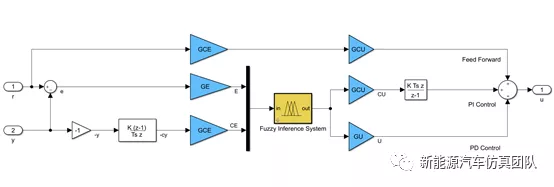
直流电机控制系统中,外环转速调节器采用模糊PID控制器.内环电流调节器依然采用传统PID控制器。从理论上讲.模糊控制器的维数越高。控制越精密。但是维数越高。模糊控制规则变得过于复杂,控制算法的实现相当困难。这是目前广泛应用二维模糊控制器的原因所在。
模糊控制输出量确定的过程:
①确定输入与输出变量的模糊子集和论域及其隶属度:
②设计模糊推理关系,确定模糊控制规则,以明确模糊关系矩阵:
③模糊决策,确定输出量在其论域上的模糊矢量:
④模糊判决,即将控制量去模糊化,得到确定的输出变量。进而得到相应的控制表。
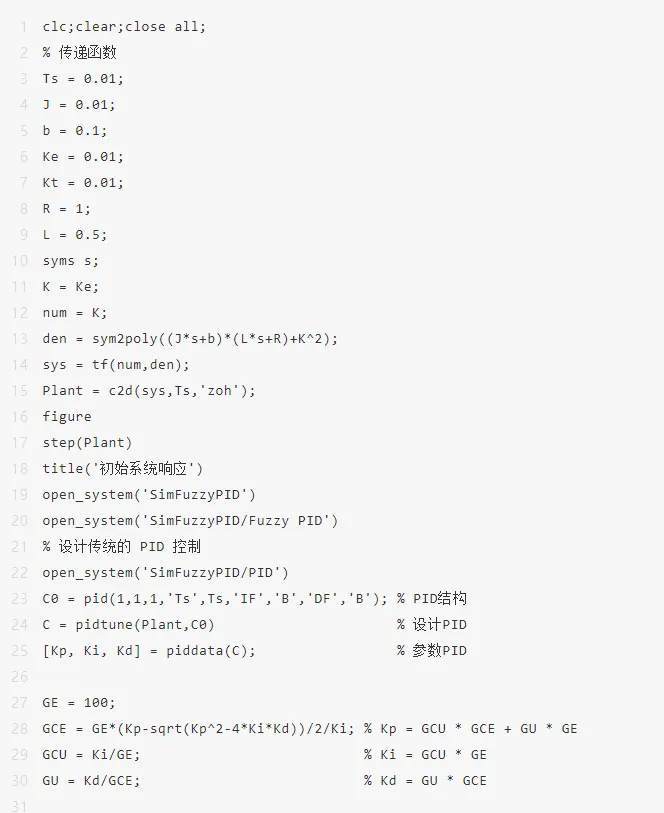
代码:

3、系统仿真与分析
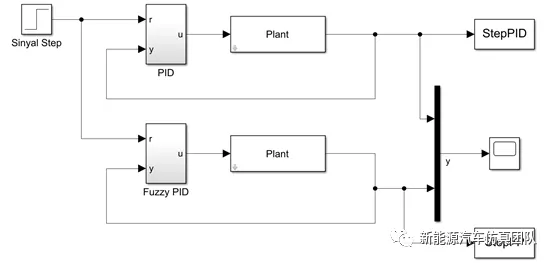
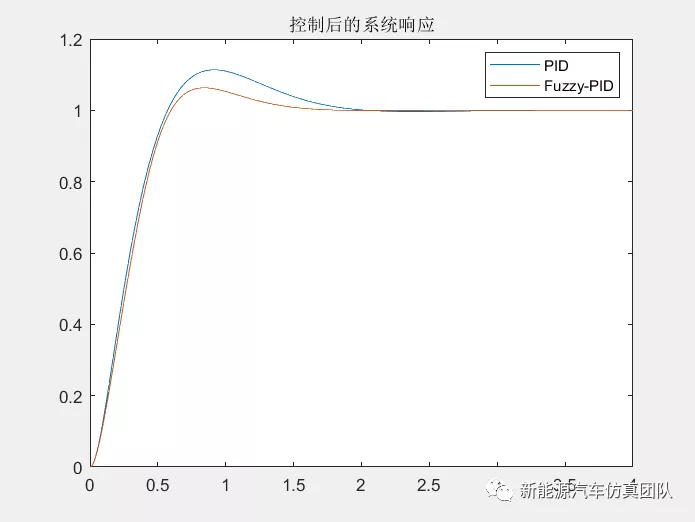
为分析模糊控制器控制性能.针对直流电机控制系统.利用模糊控制技术设计转速调节器.电流调节器依然采用传统PI控制.用Matlab/Simulink仿真工具进行了系统仿真。并和传统内外环均采用PID控制的系统指标进行了比较。
从仿真结果可以看出。模糊PID控制系统具有超调量小、鲁棒性和抗负载扰动能力强的优点。由于模糊PID的设计比较简单,容易实现,控制效果也更出色。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020