















































软件

产品


内容说明
机械臂是指高精度,多输入多输出、高度非线性、强耦合的复杂系统。因其独特的操作灵活性,已在工业装配、安全防爆等领域得到广泛应用。
机械臂是一个复杂系统,存在着参数摄动、外界干扰及未建模动态等不确定性。因而机械臂的建模模型也存在着不确定性,对于不同的任务,需要规划机械臂关节空间的运动轨迹,从而级联构成末端位姿
不确定性主要分为两种主要类型:结构(structured)不确定性和非结构(unstructured)不确定性,非结构不确定性主要是由于测量噪声、外界干扰及计算中的采样时滞和舍入误差等非被控对象自身因素所引起的不确定性。结构不确定性和建模模型本身有关,可分为
①参数不确定性 如负载质量、连杆质量、长度及连杆质心等参数未知或部分已知。
②未建模动态 高频未建模动态,如执行器动态或结构振动等;低频未建模动态,如动/静摩擦力等。
模型不确定性给机械臂轨迹跟踪的实现带来影响,同时部分控制算法受限于一定的不确定性。应用于机械臂控制系统的设计方法主要包括PID控制、自适应控制和鲁棒控制等,然而由于它们自身所存在的缺陷,促使其与神经网络、模糊控制等算法相结合,一些新的控制方法也在涌现,很多算法是彼此结合在一起的。
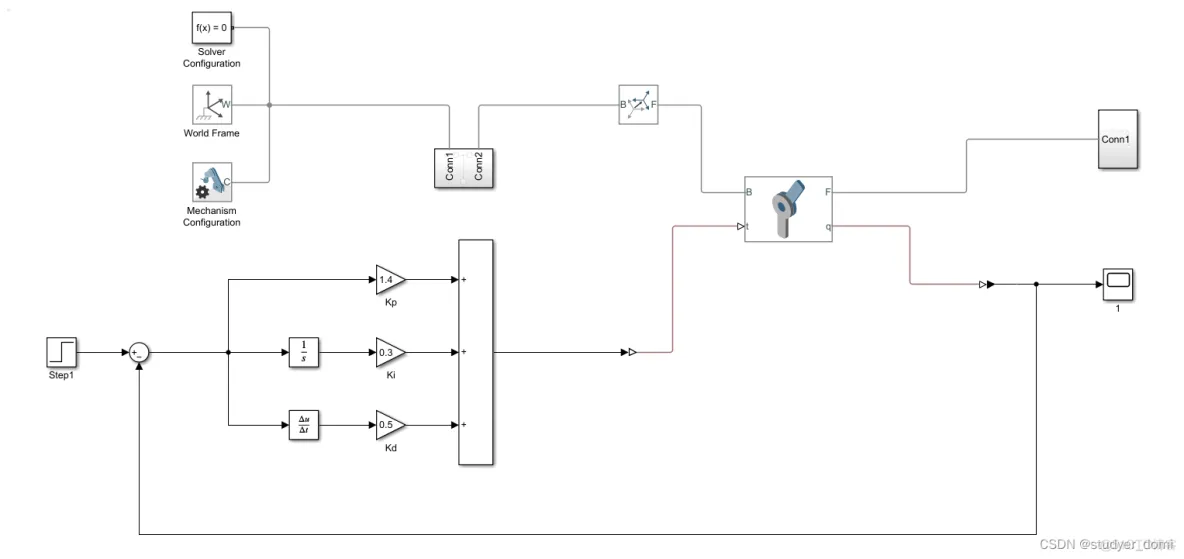
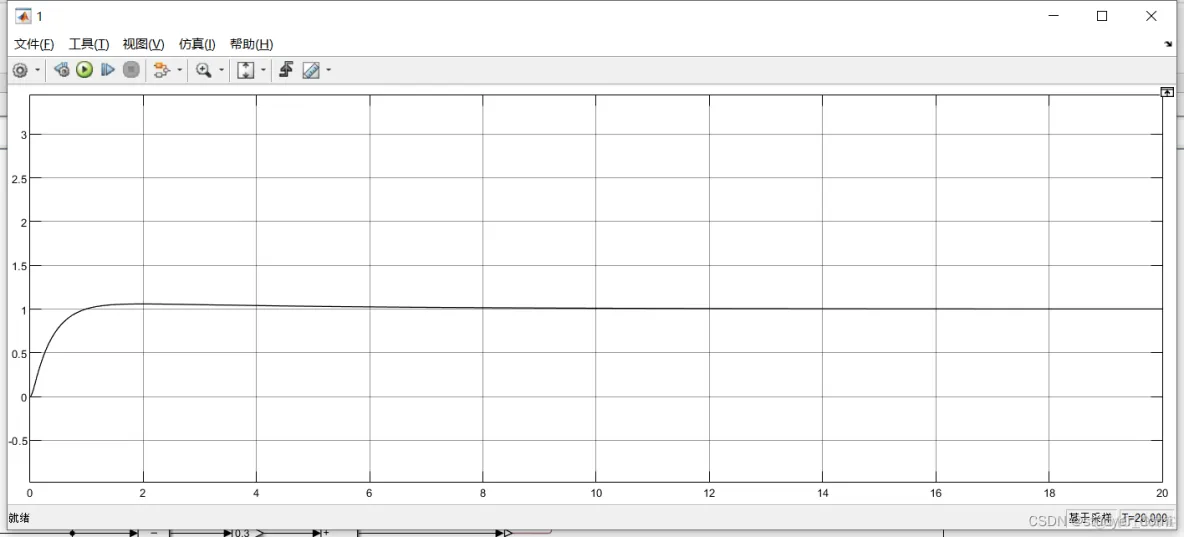
PID控制
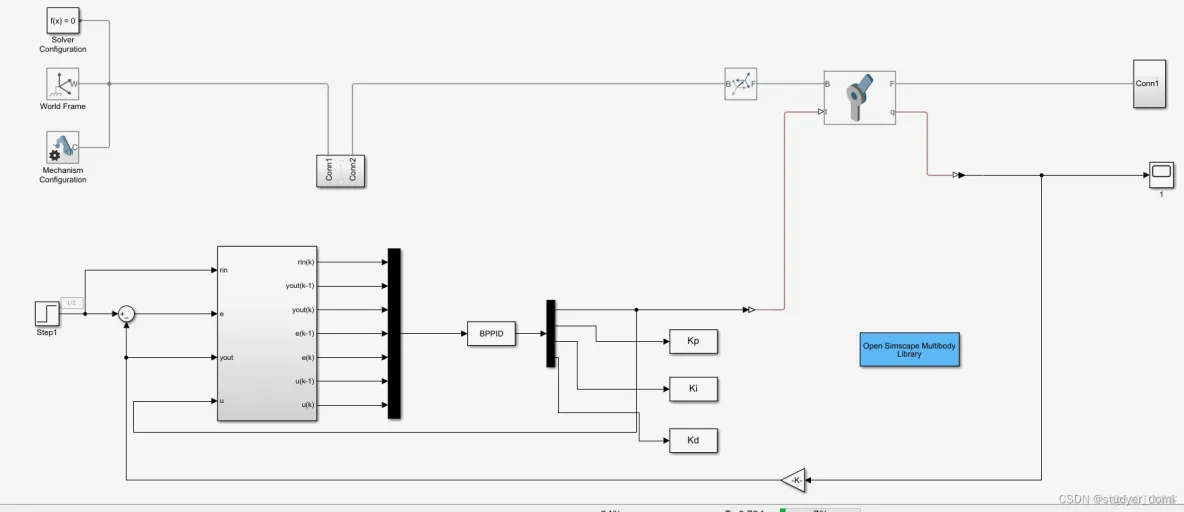
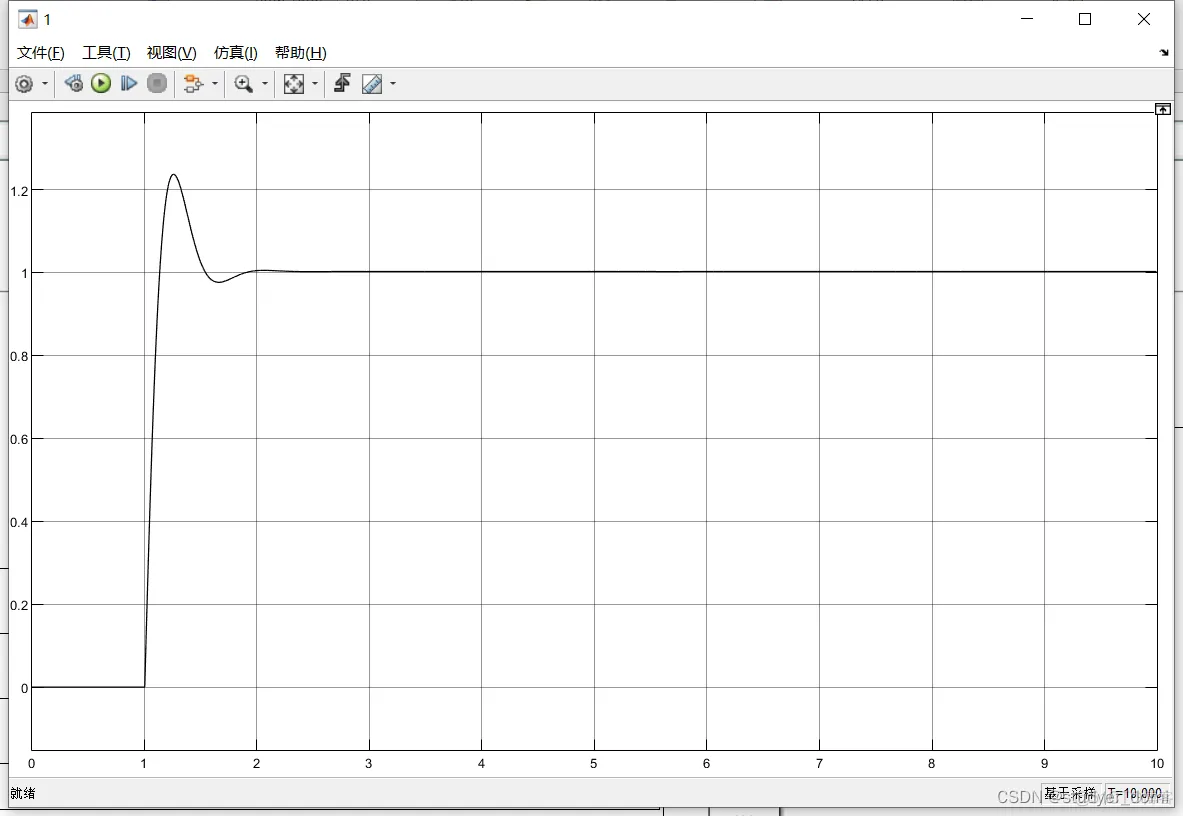
BPPID
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















