















































软件

产品


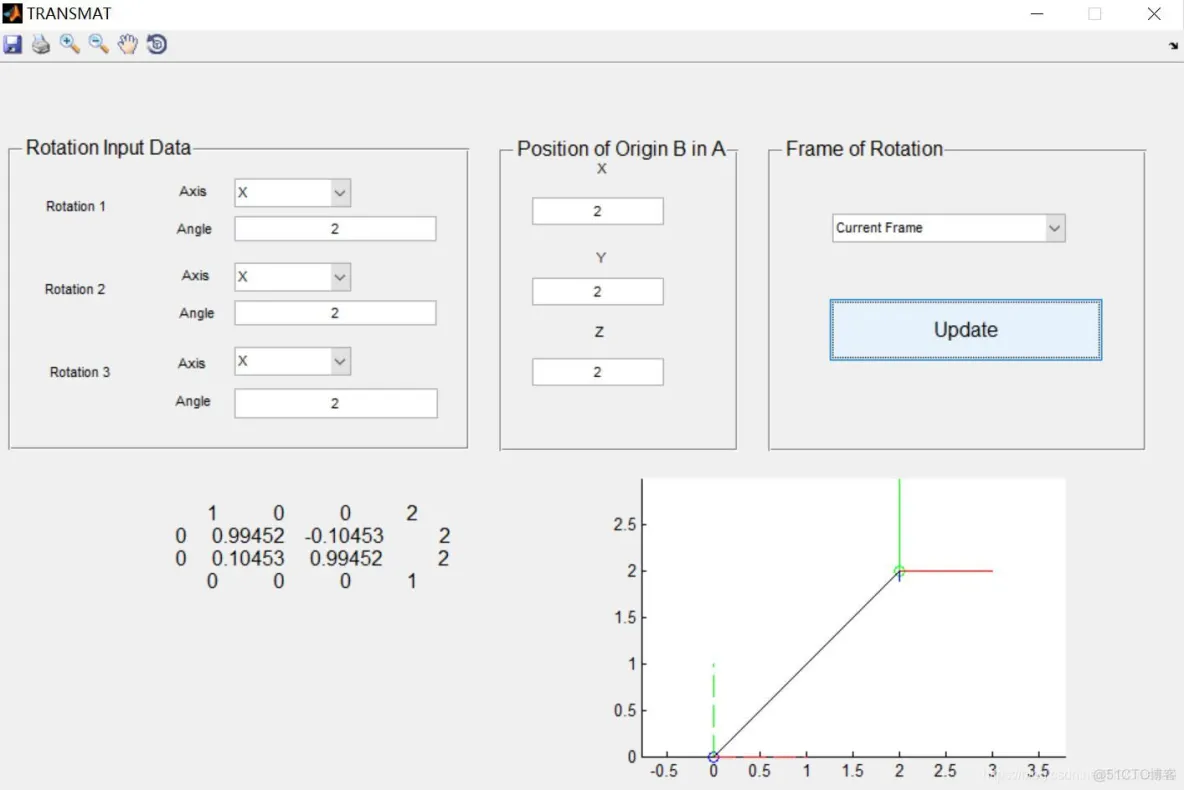
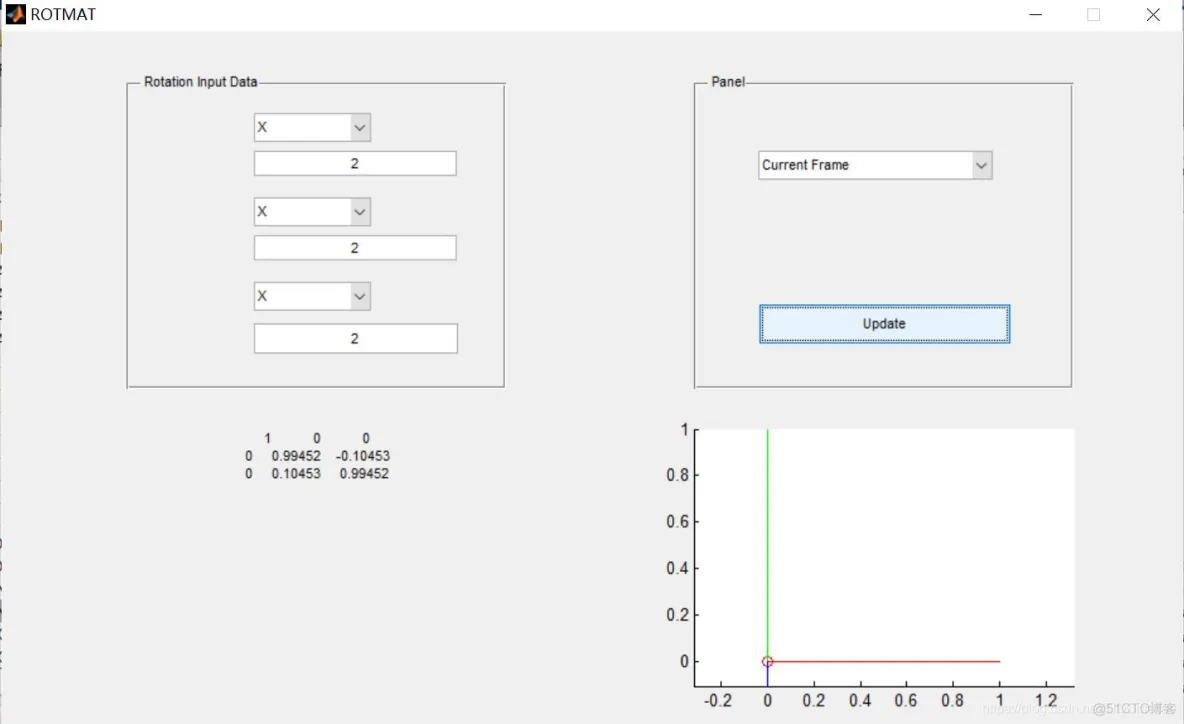
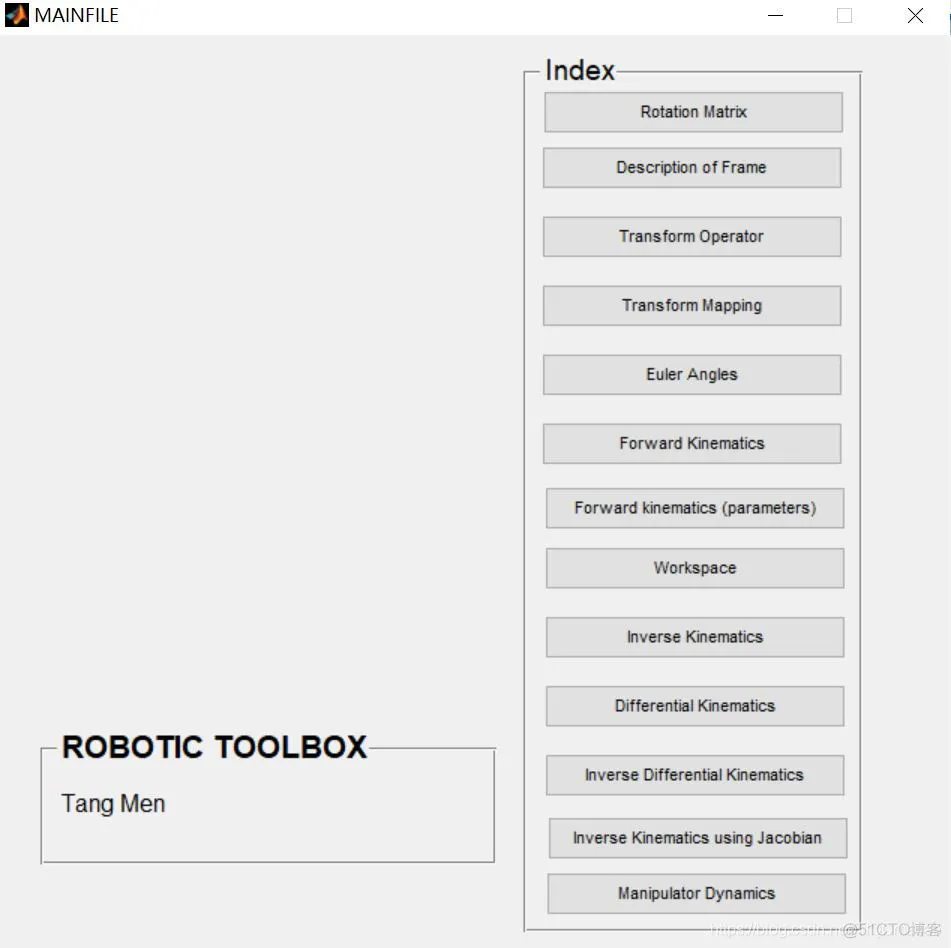
function varargout = MAINFILE(varargin)gui_Singleton = 1;gui_State = struct('gui_Name', mfilename, ... 'gui_Singleton', gui_Singleton, ... 'gui_OpeningFcn', @MAINFILE_OpeningFcn, ... 'gui_OutputFcn', @MAINFILE_OutputFcn, ... 'gui_LayoutFcn', [] , ... 'gui_Callback', []);if nargin && ischar(varargin{1}) gui_State.gui_Callback = str2func(varargin{1});endif nargout [varargout{1:nargout}] = gui_mainfcn(gui_State, varargin{:});else gui_mainfcn(gui_State, varargin{:});end% End initialization code - DO NOT EDIT% --- Executes just before MAINFILE is made visible.function MAINFILE_OpeningFcn(hObject, eventdata, handles, varargin)% This function has no output args, see OutputFcn.% hObject handle to figure% eventdata reserved - to be defined in a future version of MATLAB% handles structure with handles and user data (see GUIDATA)% varargin command line arguments to MAINFILE (see VARARGIN)% Choose default command line output for MAINFILEhandles.output = hObject;% Update handles structureguidata(hObject, handles);% UIWAIT makes MAINFILE wait for user response (see UIRESUME)% uiwait(handles.figure1);% --- Outputs from this function are returned to the command line.function varargout = MAINFILE_OutputFcn(hObject, eventdata, handles) % varargout cell array for returning output args (see VARARGOUT);% hObject handle to figure% eventdata reserved - to be defined in a future version of MATLAB% handles structure with handles and user data (see GUIDATA)% Get default command line output from handles structurevarargout{1} = handles.output;% --- Executes on button press in DOF.function DOF_Callback(hObject, eventdata, handles)% hObject handle to DOF (see GCBO)% eventdata reserved - to be defined in a future version of MATLAB% handles structure with handles and user data (see GUIDATA)run TRANSMAT.m% --- Executes on button press in TO.function TO_Callback(hObject, eventdata, handles)% hObject handle to TO (see GCBO)% eventdata reserved - to be defined in a future version of MATLAB% handles structure with handles and user data (see GUIDATA)run TRANSOP.m% --- Executes on button press in TM.function TM_Callback(hObject, eventdata, handles)% hObject handle to TM (see GCBO)% eventdata reserved - to be defined in a future version of MATLAB% handles structure with handles and user data (see GUIDATA)run TRANSMAP.m% --- Executes on button press in EA.function EA_Callback(hObject, eventdata, handles)% hObject handle to EA (see GCBO)% eventdata reserved - to be defined in a future version of MATLAB% handles structure with handles and user data (see GUIDATA)run EULERANG.m% --- Executes on button press in FK.function FK_Callback(hObject, eventdata, handles)% hObject handle to FK (see GCBO)% eventdata reserved - to be defined in a future version of MATLAB% handles structure with handles and user data (see GUIDATA)run DHPARAM.m% --- Executes on button press in WS.function WS_Callback(hObject, eventdata, handles)% hObject handle to WS (see GCBO)% eventdata reserved - to be defined in a future version of MATLAB% handles structure with handles and user data (see GUIDATA)run WORKSPACE.m% --- Executes on button press in IK.function IK_Callback(hObject, eventdata, handles)% hObject handle to IK (see GCBO)% eventdata reserved - to be defined in a future version of MATLAB% handles structure with handles and user data (see GUIDATA)run INVERSEKINEMATICS.m% --- Executes on button press in DF.function DF_Callback(hObject, eventdata, handles)% hObject handle to DF (see GCBO)% eventdata reserved - to be defined in a future version of MATLAB% handles structure with handles and user data (see GUIDATA)run JACOBIAN.m% --- Executes on button press in IDK.function IDK_Callback(hObject, eventdata, handles)% hObject handle to IDK (see GCBO)% eventdata reserved - to be defined in a future version of MATLAB% handles structure with handles and user data (see GUIDATA)run INVERSEDIFFERENTIAL.m% --- Executes on button press in MD.function MD_Callback(hObject, eventdata, handles)% hObject handle to MD (see GCBO)% eventdata reserved - to be defined in a future version of MATLAB% handles structure with handles and user data (see GUIDATA)% --- Executes on button press in IKUJ.function IKUJ_Callback(hObject, eventdata, handles)% hObject handle to IKUJ (see GCBO)% eventdata reserved - to be defined in a future version of MATLAB% handles structure with handles and user data (see GUIDATA)run INVERSEKINEMATICSJACOB.m% --- Executes on button press in RM.function RM_Callback(hObject, eventdata, handles)% hObject handle to RM (see GCBO)% eventdata reserved - to be defined in a future version of MATLAB% handles structure with handles and user data (see GUIDATA)run ROTMAT.m% --- Executes on button press in LPF.function LPF_Callback(hObject, eventdata, handles)% hObject handle to LPF (see GCBO)% eventdata reserved - to be defined in a future version of MATLAB% handles structure with handles and user data (see GUIDATA)run DHNEW.m1.2.3.4.5.6.7.8.9.10.11.12.13.14.15.16.17.18.19.20.21.22.23.24.25.26.27.28.29.30.31.32.33.34.35.36.37.38.39.40.41.42.43.44.45.46.47.48.49.50.51.52.53.54.55.56.57.58.59.60.61.62.63.64.65.66.67.68.69.70.71.72.73.74.75.76.77.78.79.80.81.82.83.84.85.86.87.88.89.90.91.92.93.94.95.96.97.98.99.100.101.102.103.104.105.106.107.108.109.110.111.112.113.114.115.116.117.118.119.120.121.122.123.124.125.126.127.128.129.130.131.132.133.134.135.136.137.138.139.140.
1 matlab版本
2014a
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















