软件

产品


在一般的车辆动力性经济性仿真中,只需要给定一个总的纵向力输入即可,如果想通过单独的驱动力、制动力接口作为输入,则需要补充额外的驱动力、制动力计算模型。
有人可能会问,驱动力、制动力直接通过油门踏板、制动踏板深度近似计算不是很方便吗?这样建模的基本思路没有问题,但是在一些特殊工况会出现很大的偏差。例如,车辆处于静止状态,踩刹车后,车辆一定会有制动力吗?
本文重点对地面制动力进行精细建模,满足多种工况使用需求,尤其是静止状态下地面制动力的计算。
暂时不考虑打滑工况,地面制动力就等于制动器对车轮的制动力。
对地面制动力建模,主要分为车辆运动状态和车辆静止状态,所以可以进行分工况建模。
1) 车辆运动:地面制动力的方向与车速方向相反,大小等于制动器制动力;
2) 车辆静止:地面制动力的方向与车辆运动趋势方向相反,大小等于车辆实际驱动力与制动器制动力取小。
车辆实际驱动力等于车辆驱动力与车辆负载(滚阻、风阻、坡阻之和)的差值,其正负方向决定了车辆运动趋势方向。
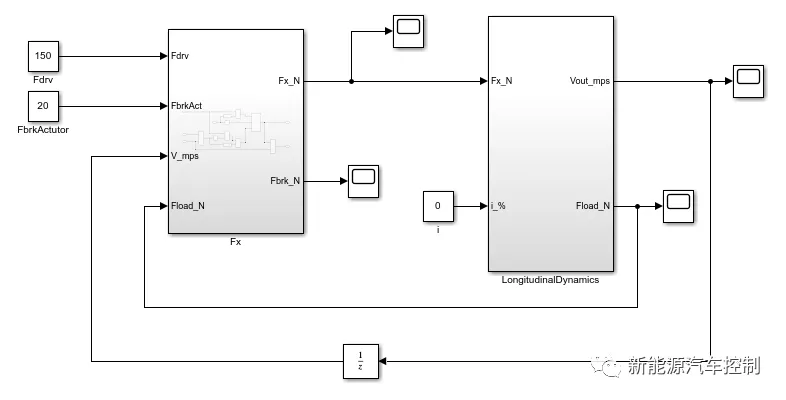
理解了上述关系,我们可以搭建以下的车辆纵向力计算模型。
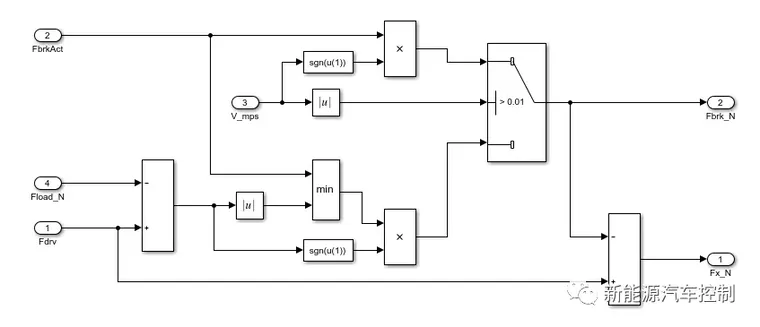
输入量:
1) 车辆驱动力:数值大小与油门开度正相关,有符号,正负分别代表向前、向后驱动;
2) 制动器制动力:数值大小与油门开度正相关,无符号;
3) 车速:有符号,正负代表车辆向前、向后运动;
4) 车辆负载:滚阻、风阻、坡阻之和,有符号,正负分别代表向后、后前。
输出量:
1) 车辆纵向力:车辆驱动力与地面制动力之差,有符号,正负分别代表向前、后向驱动。
2) 地面制动力:地面对车辆的制动力,有符号。
上述模型与上节纵向力模型可以组装为一个新的纵向动力学模型。
下面做两个工况仿真来进行模型验证。
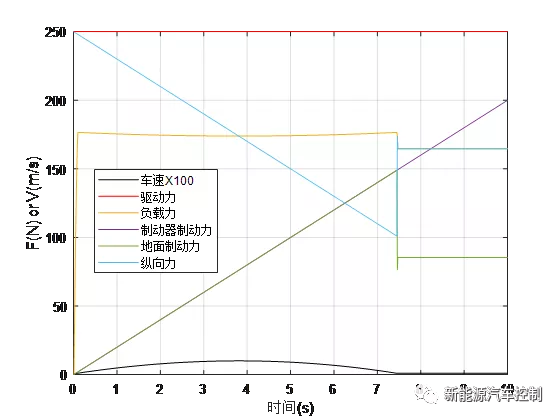
工况1:车辆静止,给定车辆驱动力为250N,制动器制动力从0到200线性变化。
可以看出,地面制动力先随制动器制动力增加,车速先正向增大后减小至0,车辆停止后地面制动力维持不变,等于驱动力与负载力之差,符合设计。
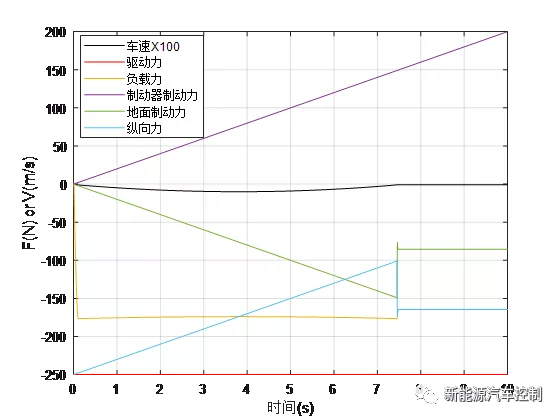
工况2:车辆静止,给定车辆驱动力为-250N,制动器制动力从0到200线性变化。
结果与正向驱动一致。
以上,介绍了车辆纵向力的精细建模过程,主要考虑静态、动态等不同情况下地面制动力的计算方法。
通过这两节的简单内容,希望可以帮助加深大家对精细建模的理解,在自己的领域需要优化局部细节模型,或者需要拓宽模型应用领域时,可以基于对物理过程的理解、总结,实现模型的精细优化。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020