















































软件

产品


1.疲劳分析有限元模型的建立
1.1 控制臂有限元模型的建立
在HyperWorks11.0 3D/solid map操作界面下对前悬控制臂的几何模型进行实体网格的划分

1.2 定义模型的材料和属性

1.3 创建分析模型的边界约束条件

1.4 分别定义不同工况条件下的载荷

1.5 分别建立静力分析工况

1.6 提交分析求解
Radioss求解提交面板

Radioss求解过程

1.7 不同工况条件下分析计算得出的控制臂位移变形云图
工况一静力分析结果
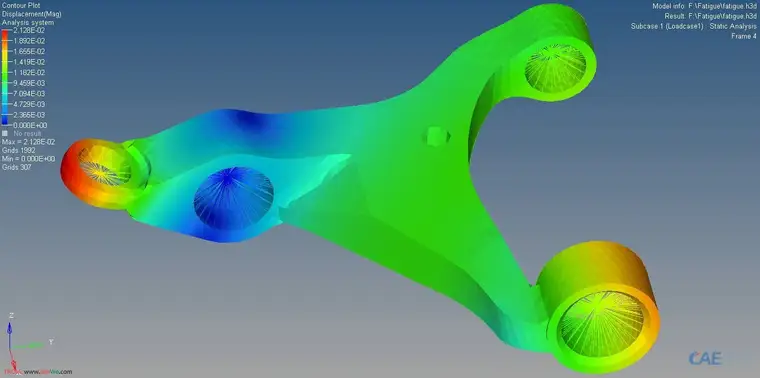
工况二静力分析结果

1.8 不同工况条件下分析计算得出的控制臂应力云图
工况一静力分析结果

免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















