















































软件

产品


摘要
深松技术是机械化保护性耕作的关键技术。。通过 Solidworks 建立了深松机的三维模型,采用 solidThinking Inspire 软件进行机架的拓扑优化,从减少质量和提高刚度 2 个角度考虑,并对优化后的机架进行验证。结果表明: 优化后的机架最大应力降低了 31. 30% ,质量减少了 39. 03% ,且固有频率与拖拉机振动频率差距较大,有效地避免了共振现象的发生。通过本次优化设计,提高了机架的静力学性能和稳定性,满足了深松作业要求。此方法可以为深松机机架的设计和优化提供参考。
深松技术是机械化保护性耕作的 4 大关键技术之一,开展深松技术研究对解决我国农业机械 化发展中瓶颈问题和推动农业生产发展具有重要意义。通过深松作业的实施,可以利用深松铲打破土壤犁底层,疏松土壤,调节土壤固、液、气 三相比,改善土壤耕层结构,减轻土壤板结现象和 水土流失,提高土壤的蓄水排涝能力,从而实现土壤肥力的自我恢复与增产增收。
虽然我国中小型深松机的研究比较成熟,但是深松过程中深松铲入土较深,所受作业阻力较大,容易造成机架扭曲变形。深松机机架的静态性能与动态特性影响深松作业效率和作业质量,并且深松机在作业时靠振动减阻,在深松过程中的振动容易引起机架共振,造成机架的变形甚至损坏。为提高机架的静力学性能及实现轻量化设计,采用 solidThinking Inspire 软件进行机架的拓扑优化,并对优化后的机架进行有限元模态分析,确定其固有频率和振型,并通过前几阶模态振型得到机架整体弯曲刚度和扭转刚度的分布情况。
1 深松机整体结构及工作原理
利用 Solidworks 软件建立深松机的三维模型, 其结构和组成如图 1 所示。深松机主要由机架、 悬挂装置、铲柄、铲尖及铲固定装置等零件组成。 机架主要由前横梁、前纵梁、侧板、后横梁、铲柄安装座、后纵梁、中间横梁焊接而成,上悬挂连接板和拉板通过螺栓连接固定在焊接的机架上,以加强机架的强度和刚度。在深松作业时,深松机通过悬挂装置与拖拉机相连,通过拖拉机的牵引进行深松作业。深松铲通过铲固定装置与机架紧固连接。拖拉机对深松机的牵引力通过机架传递到深松铲上,转化为深松铲切削土壤的力,从而破坏土壤的粘结力,改善土壤耕层结构,实现土地的耕整地作业。限深轮的作用是为了控制入土深度,保证深松的深度。
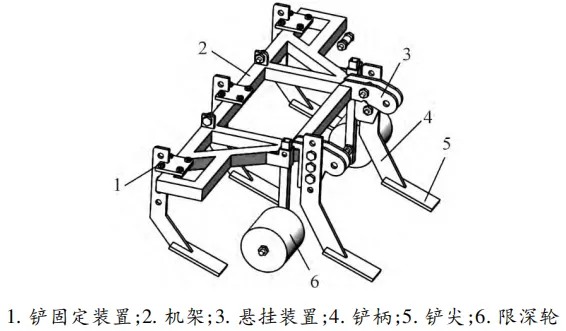
图 1 深松机整体结构
2拓扑优化
2.1拓扑优化前处理
为了提高机架的静力学性能,同时有效降低机架的质量,有必要对原有机架进行拓扑优化。本次优化使用的软件是 Altair 公司的solidThinking Inspire 软件,该软件可根据用户输入的边界条件、需要进行优化的零部件和优化目标进行拓扑优化,最终得出理想的结果,供设计人员参考。
在对机架进行拓扑优化前,先删除原有设计的减重孔,将机架原先的梁都删除,得到一块大的 平板,再将其设置为设计空间,然后设置材料和施加载荷,定义好接触关系。模型如图2 所示。
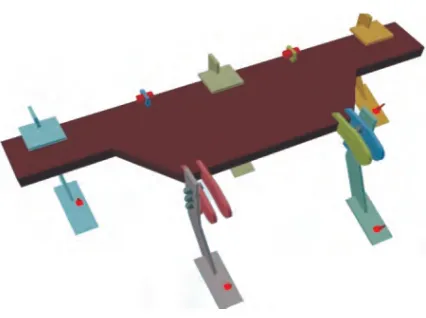
图 2 拓扑优化前机架模型
2.2以质量为目标的优化方案
在进行拓扑优化时,首先需设定优化目标。 此处以大幅度减少质量为目标进行优化,当目标质量设置为原始质量的 30% 时,solidThinking Inspire软件输出的优化结果如图 3所示。
由图3可知: 在以质量为目标进行优化时,需要减重的部位集中在机架平板的前半部分以及平板的两侧,说明这些部分应力较小,可以进行结构优化。
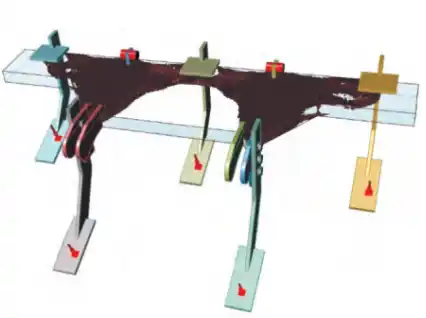
图 3 目标设置为 30% 原始质量时的最大 刚度分布优化结果
2.3以刚度为目标的优化方案
已知 Q235 碳钢的屈服强度,为确保机架在正常工作时不会发生疲劳失效,设置安全系数,得到许用应力
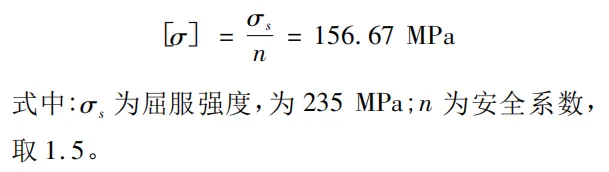
此处以大幅度提高刚度为目标进行优化,当 安全系数设置为 1.5 时,solidThinking Inspire 软件输出的优化结果如图4所示。

图 4 安全系数为 1.5 时的最小质量分布优化结果
由图 4 可知: 在以刚度为目标进行优化时,需要减重的部位集中在机架平板的中间部分、前端部分以及平板两侧,说明这些部分应力较小,可以 进行结构优化。
2.4 拓扑优化结构
综合考虑以质量为目标的优化方案和以刚度 为目标的优化方案,并结合机架的加工难度和制作成本,最终得到的优化结果如图 5所示。优化后的机架质量为 233. 76 kg,相较原始质量降低了 39. 03% 。

图5 优化后机架结构
3优化验证及模态分析
3.1优化后静力性验证
对优化后的机架施加原先的边界条件,得到 的优化后应力分布云图如图 6所示,最大应力为 177.79 MPa。
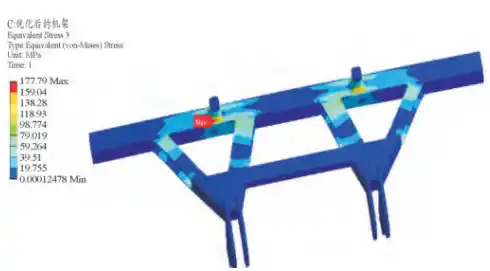
图6 优化后应力分布云图
优化后最大应力处云图如图 7 所示,最大应力处位于固定机架的螺栓孔的根部。
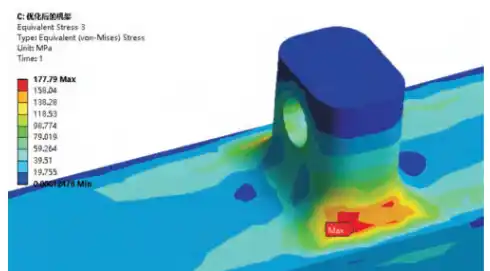
图7 优化后最大应力处云图
由以上的分析结果可知: 机架在外力作用下最大应力为 177. 79 MPa,降低了 31. 30% 。最大应力处位于固定机架的螺栓孔的根部,可以通过 加大倒圆角来优化。其余部分的应力均在 100 MPa 以下,可认为本次优化满足要求。
3.2模态分析
在添加模态分析的边界条件处理时,按照是否添加约束可分为自由模态和约束模态。因为深松机在工作时通过悬挂装置与拖拉机连接,因此 在计算时需要装配好相关零件并在连接处施加约束。
经 ANSYS Workbench 软件计算得到的前 6 阶 的固有频率和振型如表 1 和图 8 所示。
表 1 前 6 阶模态分析结果
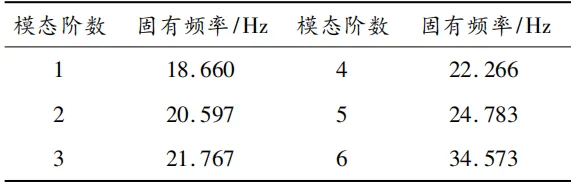
从表 1 可以得出,机架各阶固有频率随阶次 增加而递增,前 6 阶固有频率范围分布在18 ~ 35 Hz 之间。而拖拉机轮胎对高频有衰减作用,传递 到机身的主要是0~15Hz 的低频随机振动[21-23], 因此机架不会发生明显的振动叠加。
前 6 阶振型如图 8 所示。
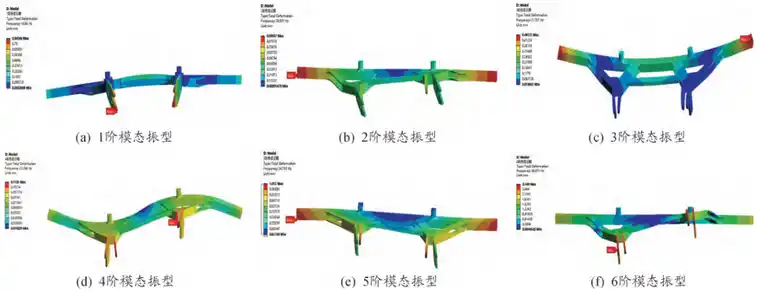
图8 前 6 阶模态振型
从图 8可以看出: 机架 1 阶模态振型主要为 深松铲固定装置的振动,最大位移为 0. 843mm; 机架 2 阶模态振型主要为机架左右两侧的振动,最大位移为 0.986mm; 机架 3 阶模态振型主要为机架左右两侧的振动及后梁的弯曲变形,最大位 移为 0.461mm; 机架 4 阶模态振型主要为机架整 体的弯曲扭转,导致机架的多个横梁和纵梁发生变 形,最大位移为 0.113mm; 机架 5 阶模态振型主要为机架左右两侧的振动,最大位移为 1. 013 mm; 机 架 6 阶模态振型主要为深松铲固定装置的振动及前梁的弯曲扭转,最大位移为.749 mm[16]。
3结束语
为提高机架的静力学性能及实现轻量化设 计,采用 solidThinking Inspire 软件进行机架的拓扑优化,从减少质量和提高刚度 2 个角度考虑,最终实现拓扑优化。
对优化后的机架进行静力学分析和模态分析,发现优化后的机架最大应力降低了 31. 30%,质量减少了 39.03% ,并且固有频率与拖拉机振动频率基本错开,不会发生振动叠加现象。
通过本次优化设计,提高了机架的静力学性 能和稳定性,满足了深松作业要求。此方法可为深松机机架的设计和优化提供参考。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















