















































软件

产品


本人准备出一个ANSYS知识普及系列,将有用的网上资料归拢,由于知识水平有限,不对之处请谅解。也欢迎各位网友提供好的资料分享,让我们共同完成这个ANSYS知识普及系列。
编辑人:技术邻ANSYS专家
业务咨询网址:http://www.jishulink.com/content/other/402981
MPC184包括使用拉格朗日乘子法实现运动约束的一类常用的多点约束单元。这些单元可以简单地分为“约束单元”或“连接单元”。 用户可以在一些需要施加运动约束的场合中使用这些单元。这些约束可以简单到铰链上的具有相同的位移值,也可以复杂到包括模型的刚性部分,或者在柔性体之间以某一特定方式传递运动的运动约束。例如,结构中可能包含一些刚性部件或者通过转动或滑块约束连接在一起的运动部件。结构的刚性部分可以使用MPC184的刚性杆或刚性梁单元来模拟,运动部分可以使用MPC184的滑块,球铰,销轴和万向联轴器单元模拟。因为这些单元使用拉格朗日乘子法实现,ANSYS能够输出约束反力和力矩。
约束单元
如果没有其它说明,使用这些单元时,三维单元选项(KEYOPT(2) = 0)为默认值。
1.球铰模型
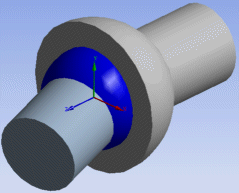
设置KEYOPT(1) = 5来定义二节点的球铰。两个节点必须重合。3维球铰每个节点有三个自由度(x,y和z方向平移)。2维球铰单元(KEYOPT(2) = 1)每个节点有二个自由度(x,y方向平移)。
图184.2: "MPC184球铰约束几何"显示单元的几何形状和节点位置。单元由二个节点(I,J和K)定义。假设节点二个节点(I和J)具有相同的空间坐标。
图184.2: MPC184球铰约束几何
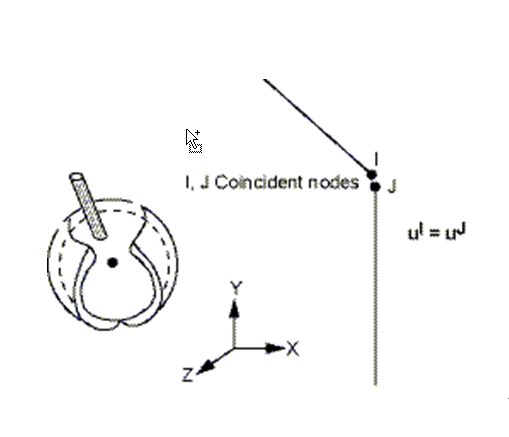
该单元不必输入材料刚度特性,目前不支持单元生死。
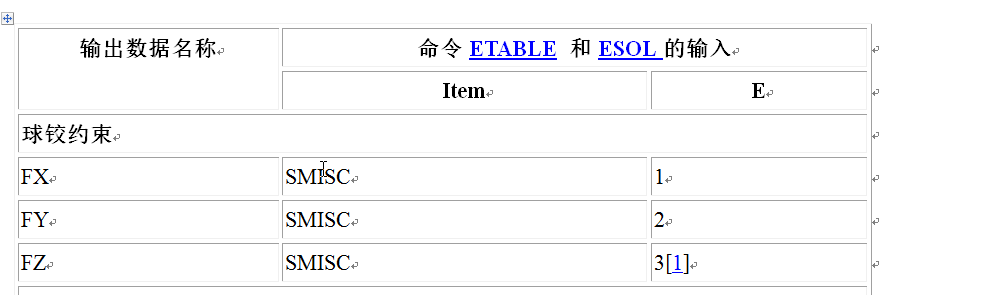
MPC184球铰单元输入概要总结了单元输入参数。 MPC184球铰单元输出数据提供单元输出的常用描述。
· 节点I和J必须重合。
· 不能在组成球铰单元的节点上施加位移边界条件。
· 方程求解器(EQSLV)必须选稀疏矩阵求解器。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















