软件

产品


SLAM (simultaneous localization and mapping),也称为CML (Concurrent Mapping and Localization), 即时定位与地图构建,或并发建图与定位。
问题可以描述为:将一个机器人放入未知环境中的未知位置,是否有办法让机器人一边逐步描绘出此环境完全的地图,同时一边决定机器人应该往哪个方向行进。
例如扫地机器人就是一个很典型的SLAM问题,所谓完全的地图(a consistent map)是指不受障碍行进到房间可进入的每个角落。
SLAM最早由Smith、Self和Cheeseman于1988年提出。
由于其重要的理论与应用价值,被很多学者认为是实现真正全自主移动机器人的关键。
当你来到一个陌生的环境时,为了迅速熟悉环境并完成自己的任务(比如找饭馆,找旅馆),你应当做以下事情:
目前用在SLAM上的Sensor主要分两大类,激光雷达和摄像头。
这里面列举了一些常见的雷达和各种深度摄像头。激光雷达有单线多线之分,角分辨率及精度也各有千秋。
SICK、velodyne、Hokuyo以及国内的北醒光学、Slamtech是比较有名的激光雷达厂商。他们可以作为SLAM的一种输入形式。
这里展示的就是一种简单的2D SLAM。
这个小视频是宾大的教授kumar做的特别有名的一个demo,是在无人机上利用二维激光雷达做的SLAM。

而VSLAM则主要用摄像头来实现,摄像头品种繁多,主要分为单目、双目、单目结构光、双目结构光、ToF几大类。
他们的核心都是获取RGB和depth map(深度信息)。
简单的单目和双目(Zed、leapmotion)我这里不多做解释,我主要解释一下结构光和ToF。
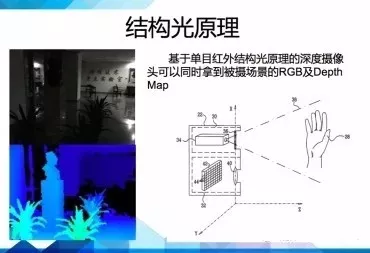
结构光原理的深度摄像机通常具有激光投射器、光学衍射元件(DOE)、红外摄像头三大核心器件。
这个图(下图)摘自primesense的专利。
可以看到primesense的doe是由两部分组成的,一个是扩散片,一个是衍射片。
先通过扩散成一个区域的随机散斑,然后复制成九份,投射到了被摄物体上。根据红外摄像头捕捉到的红外散斑,PS1080这个芯片就可以快速解算出各个点的深度信息。
这儿还有两款结构光原理的摄像头。
第一页它是由两幅十分规律的散斑组成,最后同时被红外相机获得,精度相对较高。但据说DOE成本也比较高。
还有一种比较独特的方案(最后一幅图),它采用mems微镜的方式,类似DLP投影仪,将激光器进行调频,通过微镜反射出去,并快速改变微镜姿态,进行行列扫描,实现结构光的投射。(产自ST,ST经常做出一些比较炫的黑科技)。
ToF(time of flight)也是一种很有前景的深度获取方法。
传感器发出经调制的近红外光,遇物体后反射,传感器通过计算光线发射和反射时间差或相位差,来换算被拍摄景物的距离,以产生深度信息。
类似于雷达,或者想象一下蝙蝠,softkinetic的DS325采用的就是ToF方案(TI设计的)。
但是它的接收器微观结构比较特殊,有2个或者更多快门,测ps级别的时间差,但它的单位像素尺寸通常在100um的尺寸,所以目前分辨率不高。
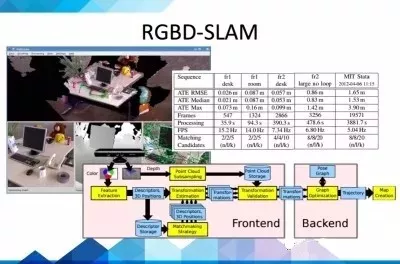
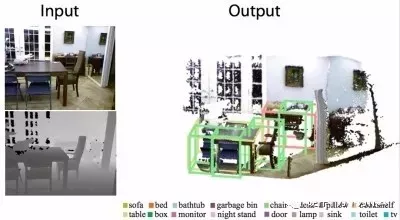
在有了深度图之后呢,SLAM算法就开始工作了,由于Sensor和需求的不同,SLAM的呈现形式略有差异。
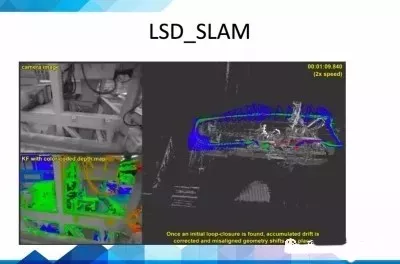
大致可以分为激光SLAM(也分2D和3D)和视觉SLAM(也分Sparse、semiDense、Dense)两类,但其主要思路大同小异。
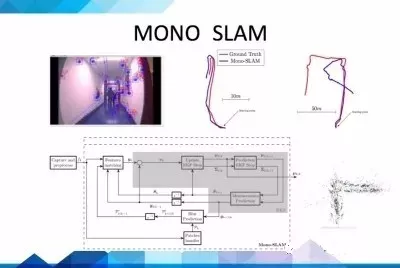
这个是Sparse(稀疏)的

这个偏Dense(密集)的
SLAM算法在实现的时候主要要考虑以下4个方面吧:
640-3
前端
后端
列举几个目前比较有名的SLAM算法:PTAM,MonoSLAM, ORB-SLAM,RGBD-SLAM,RTAB-SLAM,LSD-SLAM。

免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020