软件

产品


摘 要:
近年来,随着自主控制技术与任务载荷的快速发展,越来越多的无人机(UAV)具备了良好的任务自主能力。在执行任务过程中,降落阶段的安全风险最大,导航定位精度较差、人员决策失误等是造成降落过程中事故多发的主要原因。通过总结无人机自主降落过程中对引导控制的需求,对国内外无人机军用和民用自主降落解决方案进行了梳理和介绍,对无人机自主降落关键技术和研究现状进行了分析,提出了该领域未来发展的重点方向。
关 键 词:无人机(UAV);自主控制;自主降落;自主着舰;降落引导
随着无人机(Unmanned Aerial Vehicle,UAV)关键技术的突破与快速发展,无人机逐步适用于越来越多的应用场景。为满足无人机高频次、大范围的使用需要,确保使用全流程安全高效,无人机自主安全降落技术成为民用和军用领域的关注重点。近年来,国内外研究机构提出了多种解决方案,涌现出机载与岸基/舰基两大类引导方式。其中,机载方式受限于载荷能力和计算资源约束,存在作用距离近、实时性差、精度不足等缺点,为弥补上述短板,岸基/舰基类引导方式持续得到行业关注[1-2]。
本文系统梳理了国内外典型地基/舰基无人机自主降落引导系统,对各系统基本组成和主要特点进行了介绍,分析提出了地基/舰基无人机自主降落主要关键技术,为未来开展自主降落关键技术研究、牵引突破重点难点问题提供参考依据。
回顾历史,自1918年3月6日第一架现代无人机(“柯蒂斯”N-9)的出现距今已有百年历史,但在实际应用过程中,无人机有效导航方式始终是人们关注的重点。无人机的飞行控制系统在选用高精度惯性导航设备的基础上,广泛安装全球导航卫星系统(Global Navigation Satellite System,GNSS)设备,通过将卫星导航信息与机载数据进一步融合,不断提高综合导航精度。但由于天气因素及降落区域多波效应等影响,当GNSS信号偶发中断或受到持续干扰时,无人机的安全降落事故风险显著提升。每年世界各地均会发生多起无人机因失去导航信息而坠毁的事件,造成了人员与经济损失,也导致世界多地设置不同级别的禁飞区和禁飞事件,抑制了无人机的快速发展。与此同时,固定翼无人机由于其飞行速度快,虽然导航系统提供了准确的定位信息,但因为受到操作人员熟练程度及观察视角等约束,误操作导致无人机降落过程中受损的情况也愈发突出。据统计,在所有事故中,因操作员失误导致的事故率高达60%[3];特别在无人机起飞和降落阶段,人为因素的影响更是高达50%[4]。因此,为无人机提供自动化程度高、导航定位精度可靠的系统性引导降落方案将有助于进一步推广其应用场景,降低人员操作负担。下面针对自主降落技术的共性需求与降落主要环节进行分析。
近年来,随着国内民航机场的大量建设,民航成为人们出行的重要手段,各大机场的航班密度显著增加。经综合统计,导致晚点的主要原因与气候密切相关,民航数据(Civil Aviation Data Analysis,CADA)[5]对2012—2014年春运期间晚点情况进行了分析,气候因素(主要为雨、雪和霾)导致航班延误或取消的比例高达29.09%。
不良气候及空气污染对航空器降落带来最大的影响就是能见度降低。在飞行降落能见度衡量方面,国际民航通则规定的3个类别应用最为广泛,其分类依据为:对决断高度(Decision Height,DH)和跑道视距(Runway Visual Range,RVR)2个指标的划分,具体要求为:CAT I类,DH最低要求为60m,RVR最低要求为550m;CAT II类,DH最低要求为30m,RVR最低要求为330m;CAT III类中,对DH和RVR的要求均为0 m。按照上述要求,通常意义上所理解的真实盲降实际上是CAT III类。在国内各大机场中,具备CAT III类进近系统的机场仅北京首都国际机场、上海浦东国际机场、成都双流国际机场、南京禄口国际机场、广州白云国际机场、香港国际机场和澳门国际机场等少量机场配备CAT II类系统,绝大多数机场为CAT I类。此外,国内大多数航空公司飞行员只有CAT I类降落资格,因此当气象条件低于CAT I类时,若机组不具备降落资格则只能选择转场备降或返航。这种情况进一步影响了国内航班在夏天雷雨季节和冬季雨雪天气下的正点率。因此,若能够通过辅助手段提高和拓展飞行员“可见度”,为飞机提供精确的相对位置信息,则可以显著降低现有航班延误比例,整体上提高民航准点率。
例如,2015年3月16日18时,上海浦东国际机场上空开始出现低云天气,能见度持续降低,直至17日清晨8时能见度恢复正常。在此期间,因为机场能见度低于CAT I类落地标准,导致飞往机场的25个航班备降其他机场,47个航班被取消,进而导致后续大量航班出现延误。但是,由于使用飞机平视显示器(Head Up Display,HUD)技术让飞行员可视范围达到CAT II类标准,从青岛飞往上海的SC4603和SC4671两个航班在上海浦东国际机场安全平稳着陆,旅客行程未受影响,接续航班也准点运行。这2次降落具有里程碑意义,是中国民航首次使用HUD辅助下的CAT II类标准民航客机着陆流程。
HUD是一种机载光学显示系统,能够利用计算机和光学显示技术,将地面导航信息及航空器自身测量到的飞行姿态信息直接显示在飞行员视野正前方。因此,只要地面导航系统和飞机自身能够在足够远的距离提供精确的位置和姿态信息,飞行员则可以借助HUD 技术实现飞机的盲降。
由此可见,在没有仪器仪表的辅助下,飞行器的降落标准受制于气象条件,随着飞行器应用更为广泛,因缺少有效安全降落手段导致的经济损失将进一步扩大。
在军事领域,由于战场环境复杂和多变,对在舰船上有人机和无人机的自主起降需求则更为迫切,呈现出电磁环境复杂、平台高动态运动等特点。世界强国海军为了实现舰载机的正确返航与着舰,现代航母均配有中空交通管制系统、战术空中导航系统(Tactical Air Navigation system,TACAN,俗称塔康)和着舰引导系统。着舰过程的基本流程为接力导航过程,主要包含以下环节:
1)舰载机距离航母300 km时,该阶段导航定位信息由战术空中导航系统提供。
2)舰载机距离航母100 km时,该阶段导航定位信息由空管雷达接力提供。
3)舰载机距离航母30 km时,战术空中导航系统再次接手该阶段导航定位信息的提供。
4)舰载机距离航母10 km时,该阶段导航定位信息由着舰引导系统提供。
5)在着舰最后3 km时,舰载光学助降系统稳定捕捉舰载机,持续提供导航定位信息,引导其完成着舰。
在最后一个环节使用的光学辅助设施一般是指“菲涅尔透镜”光学助降系统,该系统不仅为有人舰载机提供相对位置的导引,也应用于无人舰载机的导引过程,如图1所示。
图1 “菲涅尔透镜”光学助降系统
在有人舰载机引导降落过程中,为提供更多信息给舰载机飞行员,在美国航母上,通常设置了着舰引导小组(Landing Signal Officer,LSO)。该小组工作区域为航母着舰区域左舷,6名小组成员分别利用航母上的多类传感器及信息化设备,通过多种方式(如灯光、手势、无线电和语音等)向舰载机飞行员提供下滑修正指令和其余辅助信息。
在无人机降落阶段,所耗费的人力资源远大于最初预期及其正常高空飞行阶段。考虑未来无人装备大量上舰,现有人员数量无法满足高频次无人机起降需求。2007年8月,美军启动了名为“无人空战系统验证机”(Unmanned Combat Air System carrier Demonstration,UCAS-D)技术验证项目,意图提高无人机自主能力水平,减少对地面或舰上操作人员的依赖,经过招标,最终选定X-47B无人机作为该项目的工程试验样机(该型无人机由美国诺斯鲁普·格鲁曼公司研发)。
为配合相关试验,美军专门在帕塔克森特河(Patuxent River)试验基地建设了配套试验条件,优先选用地面跑道来进行路上模拟测试(见图2),经全流程仿真、硬件试验和陆地模拟测试后,于2013年5月14日和17日,先后成功实施了海上复飞试验和首次着舰降落,这些细节体现了美国军方对这项技术的重视程度。
与此同时,无人作战是美军投入巨资开展的重要研究。其中,“舰载监视与攻击无人机系统”(Unmanned Carrier-Launched Airborne Surveillance and Strike,UCLASS)是美国海军在UCAS-D之后的下一代无人作战飞机计划,于2013年公开招标。该计划目标是在2020年前后部署在现役航母上,支持具备独立执行任务的无人机自主起降,并能够与有人机协同飞行,形成航母舰载机力量群。UCLASS项目除提高无人机本体的作战能力外,还特别强调无人机的航母自主起降能力、有人-无人机的协同能力和空中自主加油能力,从而形成对中国沿海地区进行战略侦察、监控和打击。
图2 无人机美军帕塔克森特河着陆验证基地
2 无人机自主降落系统发展现状
2.1.1 仪表着陆系统
在民航领域起步阶段,仪表着陆系统(Instrument Landing System,ILS)安装在地面机场跑道周边,在民用航空器进近和着陆阶段向飞行员提供降落引导信息。该系统于1919年通过了美国国家标准局组织的试验,并在第二次世界大战期间发挥了重要作用,从而进一步得到了推广应用。1949年,仪表着陆系统被国际民航组织(International Civil Aviation Organization,ICAO)作为国际标准向世界各国推广使用。该系统能够为飞行器提供方位角、仰角和距离信息,上述信息的解算通过地面站和机载设备配合完成。在飞行器进近过程中,机载接收机实时解算地面航向信标和下滑信标所产生的频率不同的波束,通过对水平和垂直方向波束的解算得到相对定位信息。航向信标台一般工作在超高频(UHF)频段,负责提供飞行器与跑道中心线的偏移程度;下滑信标台一般工作在甚高频(VHF)频段,负责提供与理想下滑面(2.5°~3.5°)的偏移情况。该系统是目前应用最为广泛的引导系统,具有较好的鲁棒性和适配性,导航定位精度在5~20m之间,但随着近年来机场附近电磁频谱环境的日益复杂,该系统的解算精度受到一定干扰,且定位精度与更新频率难以满足无人机控制系统的精度需求。
2.1.2 雷达着陆系统
1943年,美军将雷达技术应用到地面控制进近(Ground Control Approach,GCA)系统,并逐渐推广至民用航空领域;1947年,美国西南航空公司一架DC-3型飞机,在雷达着陆系统与仪表着陆系统的引导下,实现了世界上第一次真正意义上的商业航班盲降。该系统提供的信息主要依托雷达设备,在获取相对位置信息后,由于最初数据链不具备回传条件,飞行员通常通过语音形式与塔台领航员对话,通过语音报送,飞行员获取下滑路径偏差数据,弥补其视觉观察产生的测量误差,最终完成安全降落过程。近年来,随着数据链、飞行控制器和数据融合算法的发展与成熟,这种引导降落方式演变为“数据链+雷达”形式,即地面或舰基雷达系统在解算出偏差后,通过高速数据链将信息回传至机载设备,飞行控制器根据飞机运动学与动力学特点,实时解算相对值位置并作出预报,同步更新引导率与控制策略,最终实现半自主或自主降落。
2.1.3 微波着陆系统
1978年,为进一步提高引导降落精度,国际民航组织认可了时间基准波束扫描(Time Reference Scanning Beam,TRSB)技术的着陆系统,该技术是典型的应用微波手段实现相对位置测量的解决方案。该系统由机载接收机、地面方位测量设备、仰角测量设备和测距仪4个主要部分组成。其中,机载接收机通过接收地面方位测量设备和仰角测量设备的周期性信号进行位置解算,根据同一个设备2次波束信号的时间间隔,可以准确得到飞行器所处的空间位置与速度,但该系统费用相对昂贵,校准周期及校准操作的复杂性导致该系统在民用领域应用推广较为缓慢。
2.2.1 联合精密进近和着陆系统
美军在导航领域主要依赖全球定位系统(Global Positioning System,GPS),同时为满足其海上平台引导降落需求,启动了名为联合精密进近和着陆系统(Joint Precision Approach and Landing System,JPALS)的研究[6]。其中,舰机同步技术与高速传输技术是该系统的2项关键基础,该系统于2000年完成试验测试,2017年10月至2019年3月在两栖登陆舰上部署,实现对F-35B的引导降落,2019年4月完成了在艾森豪威尔号航母(CVN-69)上的适配测试。
JPALS由模块化开放式系统硬件与软件单元模块组成,能够与舰载空中交通管制和着陆系统体系相互集成,并获取相关信息向飞行员提供数据显示和操作建议。该系统硬件设备主要包括GPS传感器、导航数据链、船舶运动测量传感器、维护保障系统和船舶信息接口等。在降落过程中,由于舰船船体和飞机均处在同时运动过程中,为满足信息的双向传递,该系统采用超高频UHF双向数据链,将舰船本体GPS位置及其摇摆、俯仰、偏航和航向运动数据融合计算后,上传至飞行器控制系统。与此同时,飞行器控制系统也将其自身融合得到的位置信息回传至舰船引导系统,2个平台的相互连通提高了定位精度。未来,该系统还将支持F-35B/C和MQ-25A在航母等大型舰船的自主降落。
在舰载JPALS提供的引导信息中,融合算法重点提升了对舰船与飞机之间相对位置的解算精度,经试验测试该系统纵向和横向精度控制在1m之内,满足CAT III级别降落要求。从2005年开始,美军已开始推广JPALS,逐步替换现有的以AN/SPN-46雷达为主要手段的舰载精密进场着陆系统,如图3所示(https://en.wikipedia.org/wiki/AN/SPN-46(V)/1?oldformat=true)。根据其试验进展,在2019年,该系统已具备初始运行能力(Initial Operating Capability,IOC),到2030年将具备完全运行能力(Full Operating Capability,FOC),提供更高精度的引导定位数据。
图3 AN/SPN-46雷达
2.2.2 目标定位与跟踪系统
1999年,瑞士RUAG宇航公司开发研制了目标定位与跟踪系统(Object Position and Tracking System,OPATS),该系统通过应用激光测量技术,实现了对无人机位置与角度的测量,能够支持瑞士空军“巡逻兵”无人机的引导降落。
OPATS需要在无人机首部安装专用反射体,以此增强激光的反射效果,满足远距离探测需要。地面系统在完成角度和位置结算后,通过数据链回传引导信息至飞行控制器,实现对无人机的引导控制,如图4所示(https://www.uasvision.com/2012/03/02/ruags-laser-based-automatic-uas-landingsystem/)。在气象条件良好的情况下,该系统的目标检测范围为35~4000m,精度控制在±1.5m。
2.2.3 无人机通用自动回收系统
1996年开始,美国内华达山脉公司(SNC)开始为美国军方设计无人机通用自动回收系统(UAV Common Automatic Recovery System,UCARS),先后研发了V1和V2两个版本。该系统能够为无人机提供相对定位,满足MQ-8B和MQ-8C火力侦察兵旋翼无人机的降落需求,并能够模块化换装至其他无人机平台兼容适配。美国海军陆战队应用该系统,实现在战场完成对“先锋”无人机的自主降落,如图5所示(https://www.sncorp.com/media/1998/ucars-v2 product-sheet.pdf)。2006年,完成了对RQ-8A活力侦察兵的着舰试验。
图4 瑞士OPATS系统
图5 无人机通用自动回收系统
该系统采用的测量方式为毫米波雷达。由于毫米波自身物理特性,相较微波导航定位设备,毫米波设备的波束更窄、质量更轻、带宽更大,抗干扰能力也得到进一步提升,特别是毫米波能够有效穿透雾、雨、浓烟和尘埃,具备良好的气象环境适应性,是野外机场和海上实现对无人机引导定位的理想手段。
UCARS的第二代系统(V2)由舰载或陆基跟踪子系统和机载应答器2部分组成。舰载或陆基跟踪传感器可实现对飞机运动的测量及相对位置的估算,并能够输出稳定的位置和移动数据解算结果,供无人机自控设备定位使用。此外,该系统配备了一个平行对准照相机,可以为无人机的操作员提供实时视频反馈信息。
与此同时,在增强舰基/岸基探测定位手段之外,X-47B无人机自身也配备了更强的传感器设备。美国海军科技网站(Naval Technology)披露[7],该无人机导航系统除应用传统GNSS和视觉信息之外,还具备融合Inverse SAR雷达、SAR雷达等信息的能力。上述传感器与地基/岸基引导系统相互配合,可进一步提高导航定位精度与预报准确性,降低安全降落风险,如图6所示。
2.2.4 SADA甲板自动起降引导系统
在自主起降研究领域,法国DCNS公司开发了SADA自动甲板起降系统[8]。该系统的主要传感器为红外传感器,相较可见光设备可以更远距离精确跟踪无人机,同时向飞行控制器发出控制指令,引导无人机稳定靠近,最终利用“鱼叉”式装置完成对准与降落。2008年10月9日,SADA甲板自动起降引导系统实现了对S-100型旋翼无人机(奥地利西贝尔公司研制)的引导降落。该无人机以自主模式飞行至航行在地中海上的法国海军驱逐舰“蒙特卡姆”号(Montcalm)周边,在完成系统握手、引导进近等一系列动作后,安全降落在该舰后甲板上。该系统引导控制精度约30 cm,可以在五级海况条件下正常工作。
图6 X-47B降落过程[7]
2.2.5 D2AD甲板自动起降引导系统
除采用光学类引导设备之外,法国DCNS公司和Thales公司探索使用无线电测距设备来辅助完成无人机自主甲板降落(D2AD)。2012年,该系统分别部署在一架波音H-6U“小鸟”旋翼无人机和一艘法国海军“拉斐尔”级护卫舰上,完成了远距离对准、运动平台相互测量等一系列技术验证[9]。无人机模块和舰基模块是D2AD甲板自动起降引导系统的2项重要组成,无人机模块是指安装在无人机上的引导信标设备,舰基模块是飞行甲板面上安装的信标传感器及测量舰艇运动状态的传感器。该系统能够在不依赖任何卫星定位系统条件下正常工作,海况适应性可以达到五级。
2.2.6 DeckFinder降落系统
“甲板发现者”(DeckFinder)降落系统由欧洲航宇防务集团(EADS)阿斯特里姆公司开发,目标是提高着舰区域的相对定位精度。该系统利用多个信标进行定位,完成对旋翼飞行器的助降。2013年6月,S-100型无人直升机配装该设备信标,完成了在GNSS受干扰环境下的自主起飞与回收能力综合测试。该系统由位于地面的6台射频发射机和1台机载接收机组成。地面部分按照设定的几何构型,安装在甲板降落区域,通过计算不同射频发射机的时间长度,解算得到相对位置。该系统对飞行器的测距测量不需GNSS系统支持,可为飞行器提供高精度的三维位置信息,工作范围约为1.1 km,工作频率不小于15 Hz,相对定位精度优于20 cm。
2.2.7 MagicCarpet降落系统
“魔毯”(MagicCarpet)降落系统是美国海军近年来研制的新型精密着舰先进控制与现实技术,于2015年4月完成首次海上试验,2016年完成F/A-18E/F配套测试。该系统重点对飞行控制器算法中升力控制技术部分进行了改进提升,实现下滑轨迹规划与着舰阶段姿态的解耦控制,并将下滑轨道误差、对中误差、指令幅值等信息提供给飞行员,进一步优化着舰流程,简化飞行员操作负荷,着舰成功率与安全性得到显著提升。
JPALS系统重点提供岸基和航母甲板着舰区域的经纬度坐标信息,MagicCarpet降落系统更加注重提升无人机/有人机在降落过程中的平滑程度。
在无人机自主降落领域,机载视觉技术是发展较早、解决方案众多且对降落区域硬件设备无硬性要求的通用关键技术,通过机载视觉系统对降落区域或特定目标进行探测、识别和定位,实现相对位置的估计。地基引导和运动平台姿态估计技术是近年来为满足降落过程中相对定位精度、预报运动平台位置等需求发展起来的专用关键技术。
韩国航天工程部提出一种基于机载视觉的引导着陆方案,该方案在降落区域放置红色圆拱型安全气囊,小型无人机上视觉传感器自主识别红色目标及尺度,完成相对定位和无人机回收[10]。
Kim等[11]提出了一种基于颜色分割与形态学的图像处理算法,在机载视觉设备上对撞网区域图像特征进行识别,完成了对小型固定翼无人机的引导回收。该视觉算法重点对预知的几何图形进行分析,反向解算得到无人机当前方位信息,在降落过程中实施修正引导率和控制率;地面控制系统实施检测无人机飞行状态,必要时进行人工介入,提高降落过程安全性和可靠性。
朱建明[12]对H型合作目标进行了修改,将传统H型目标的上端开口进行封闭,提升了新图形的方向性特征。在从空中识别降落区域H型目标过程中,采用了基于灰度变化的角点检测方法,通过对特征点的解算,获取无人机的相对位置。
Shakernia[13]在 博 士 论 文 中 提 出 了 应 用 于Yamaha R-50型旋翼无人机视觉自主降落解决方案,该方案的核心思想也是利用合作目标实现相对位置估计。与此同时,Shakernia还研究了线性/非线性双视图运动估计(Linear/Non-linear Two-view Motion Estimation)算法和多视图平面算法(Multi-view Planar Algorithm),在得到相对位置信息之外,有效估计了无人机在降落过程中的姿态情况,为无人机飞行控制系统有效产生控制指令提供辅助信息。通过仿真与户外综合试验,该方案位置偏差控制在0.05 m,角度偏差控制在0.5°,较好地实现了精确定位与准确降落。但由于合作标识不适用于多数无人机场景,该算法迁移至对非合作目标的识别及位置姿态估计具有一定难度。
南加州大学设计了基于H型着陆标志,通过计算Hu不变矩进行着陆定位,该系统目前的精度为:位置误差小于0.4m,角度误差小于0.7°。
3.2.1 基于GNSS的引导降落技术
文献[14]在建立数字仿真环境的过程中,引用了WVU YF-22、NASA GTM、Pioneer、Tiger Shark和OX飞行器的动力学参数。其中,Pioneer和Tiger Shark两种类型的无人机为中型无人机,与实验室现有的设备类型相似,可以将动力学参数作为参考,进而建立更加真实的飞机模型,验证引导系统的鲁棒性。
在综合测试方面(见图7),可将2台GPS天线按T型结构安置,通过几何关系得到船体的位置和姿态变化,从而评价多传感器融合后的舰船位姿估计结果。
图7 T型GPS天线[14]
3.2.2 基于视觉的引导降落技术
在地基视觉引导方面,采用部署多台固定焦距相机[15]进行接力测量、分区引导无人机降落过程是近年来的一种新思路。国防科技大学空天科学学院提出的系统方案如图8所示,该系统视觉引导部分由6台选定不同焦距和视场角的工业高速摄像机与服务器组成。6台摄像机分为3组,分别部署在跑道两侧,按照远场、中场和近场测量需要进行标定调试。一般情况下,各相机的视场范围需要有一定的交叉重叠,形成的整体视场范围覆盖全部着陆区域。这种解决方案设计思路简单,多种焦距组合弥补了单个视觉系统视场角受限的不足,但该系统整体架构复杂,户外部署位置误差对解算精度影响大,且视觉系统在标定过程中步骤复杂,部署灵活性需进一步增强。
图8 多视角地基引导系统[15]
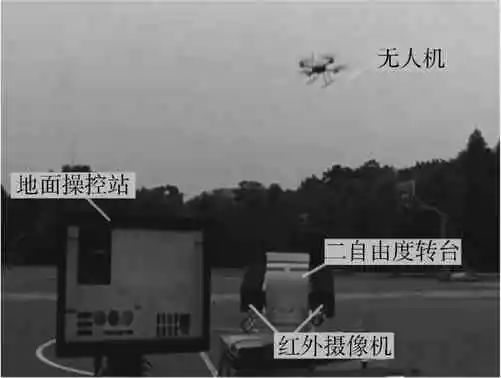
为进一步探索地基视觉系统的应用,2012年国防科技大学智能科学学院首先提出了基于远红外相机的短基线引导装置[16],该系统方案如图9所示。通过试验验证,利用红外传感器特性,该系统能够识别MD4-200型四旋翼无人机,识别距离在100m左右,定位精度在20 cm,能够满足无人机的引导降落需求。但是,该方案由于受到红外相机之间基线的限制,探测距离相对受限,不能满足固定翼无人机的远距离引导降落需求。此外,由于远红外传感器的成像特性,在出现低空云层时,系统所采用的Meanshift方法鲁棒性不强,容易出现跟踪丢失情况,位置解算精度受到严重影响。随后,为进一步拓展基线长度,满足固定翼无人机降落需要,2013年该团队设计提出了基线长度约10m的综合引导系统[17],如图10所示。该系统由红外摄像机和可见光摄像机组成,增强了对远端无人机的探测和识别精度,同时位于跑道两侧的可见光与红外摄像机分别安装在双自由度转台上,以此实现对降落空域的大范围搜索。经外场试验验证,该系统能够在800~1 000m距离自主实现对翼展为3m的固定翼无人机的探测和识别,在引导降落过程中,水平和竖直方向引导精度约为0.8m左右,高度精度约为1.2m。
图9 短基线地基双目引导系统[16]
Fig.9 Short baseline ground-based binocular guidance system[16]
图10 长基线地基引导系统[17]
3.2.3 其他地基/舰基引导方式
2019年,波兰学者Kelner和
Yang等[19]提出了利用地基阵列鱼眼镜头实现对旋翼无人机的引导降落,该方案提供了双目、三目和四目3种解决方案。鱼眼镜头的使用使视场角更为广阔,可实现对各个角度旋翼机的引导。此外,通过在旋翼机上安装近红外发射二极管,进一步提高了对无人机的识别距离及精确度,最远识别高度约200m。
综上所述,无人机与降落区域之间相对位置的测量精度与预测准确性是提高自主降落安全性与成功率的关键。在降落引导系统设计过程中,应充分考虑在机载、舰基/岸基2个位置配置合适的传感器,充分发挥不同位置信息的采集优势,通过数据融合,实现平台间相对位置的测量与预报。重点在以下3个方面开展研究。
随着机载传感器的小型化与集成化,以及计算机视觉技术的快速发展,机载视觉任务载荷将在引导降落过程中发挥更为重要的作用。一是充分利用无人机在空中探测范围开阔的优势,提高对着舰/着陆区域态势构建的速度,降低降落过程中的安全风险;二是有效发挥视觉信息相对定位特点,在拒止环境或电磁环境干扰较强时,视觉信息仍具备对无人机与降落区域相对位置与姿态的测量能力;三是针对不同载荷状态条件下的无人机特性,机载引导系统算法应具备自适应参数调节与场景匹配能力,降低人员遥控介入时的误操作风险。此外,还要充分发挥仿真试验[20]和集成演示验证[21]手段对算法验证的重要作用,确保实际飞行试验验证的综合效益。
除进一步完善机载引导系统研究之外,地面与舰船系统还需充分组合现有光学、雷达等各类引导降落手段,充分发挥地面或舰船系统运算能量强、传感器种类丰富的优势,实现对无人机在降落过程中的稳定捕获、定位、测量与引导。此外,新型引导降落系统还需与现有舰船雷达电子设备相互匹配,满足电磁兼容设计需要。
考虑无人机平台着舰的本质是动平台之间相互稳定测量问题,因此舰船在高海况下的运动状态与估计对提高降落安全性至关重要。舰船控制系统应具备较为准确的平台运动姿态估计与预报能力,并将上述信息准确反馈至无人机飞行控制器。无人机飞行控制系统同时具备应用和融合机载与舰载回传信息能力,提高在无人机进近阶段的控制精度,有效控制着舰时的加速度冲击,降低设备损伤[22]。
无人机自主技术的快速发展,加快了无人机走向复杂战场环境的脚步,也催生了新型的作战样式。舰载无人机的类型也在逐渐从早期的旋翼机向复合翼发展,舰载机的数量也将进一步提升,对无人机在降落阶段的安全性及舰载引导降落系统的通用性提出更高要求。未来一段时间,以岸基/舰载多型传感器设备、多类数据相互融合为主要手段的一体化引导技术将进一步快速发展,逐步提高的自主降落能力,将显著减少地面或舰艇操作人员的负担,充分发挥无人系统作战优势。本文梳理了当前国内外研究现状并进行分析与评述,为进一步开展无人机自主降落关键技术的研究提供参考。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020