















































软件

产品


PUMA560是典型的6轴关节式机器人,广泛应用于汽车、电子、甚至航天领域。今天用ADAMS模拟它在流水线上取料,并输出每个关节的驱动力矩——这对电机选型很有用。
几何模型构建:从SolidWorks导出PUMA560的STEP或Parasolid模型(含基座、大臂、小臂、腕部、末端吸盘及一个物料块)。导入ADAMS后,按照DH参数建立6个旋转副,关节轴线一一对应。
材料定义:各连杆按铝合金设定(密度2.7e-6 kg/mm³,E=7e4 MPa),物料重0.5kg。
动力系统模型:在每个旋转副上添加“Motion”驱动,初始状态设定为取料起始姿态(臂伸直、吸盘朝下)。
驱动条件:规划取料运动——大臂抬起30°,小臂前伸200mm,腕部旋转90°,吸盘接触物料后保持1秒,再原路返回。用ADAMS的“Step”函数写入各关节角变化,总时长8秒。
求解设置:终止时间8s,步数1000,求解器选GSTIFF,打开大变形选项。
仿真动画:播放检查有无干涉,末端吸盘是否准确压到物料。
查看结果:提取6个关节的驱动扭矩随时间变化曲线。实测例如J2(肩关节)在物料抓取瞬间峰值达45N·m,J6最小约3N·m。
评估结果:如果某个关节扭矩超出现有电机额定值,可优化轨迹(如降低加减速度)或调整负载。ADAMS直接输出最大扭矩值,帮你避免电机过载停机。
2.1几何模型的构建
打开ADAMS View,新建一个文件,并且定义好路径和命名,导入如图1所示的几何模型。
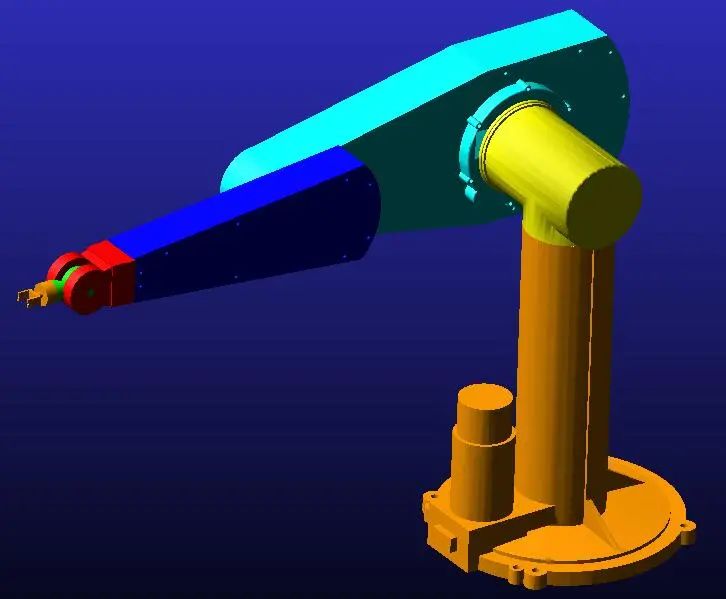
图1 模型导入
2.2材料定义
材料采用默认的结构钢,不需要重新进行定义。
2.3动力学系统模型构建
创建机器人各个关节之间连接关系,如图2所示。
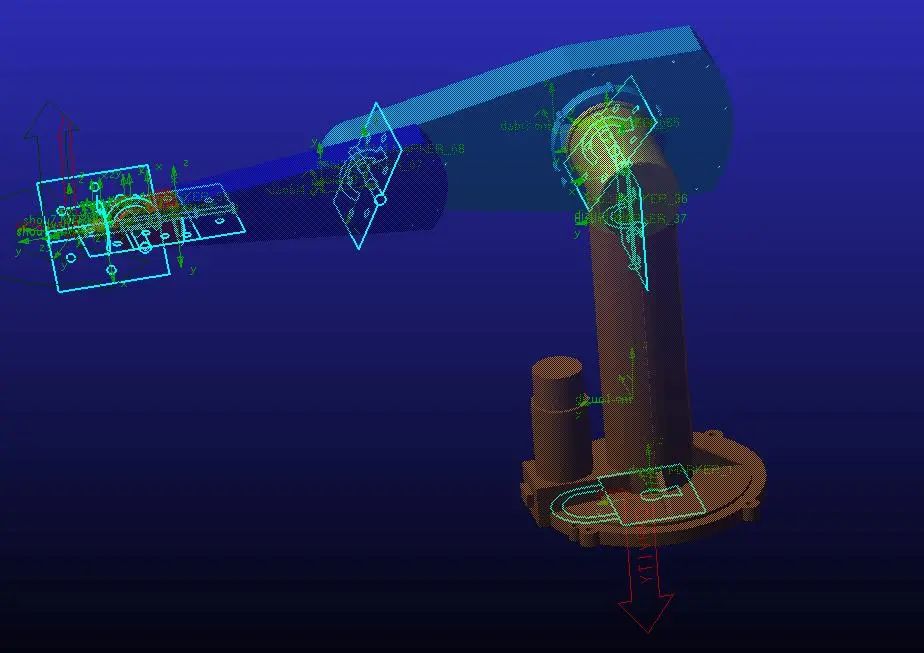
图2 创建连接关系
3.1驱动条件
对机器人的各个关节施加相对应的驱动,如图3所示,并且对不同关节施加不同的驱动函数,分别如图4、图5、图6、图7、图8、图9所示。

图3 施加驱动
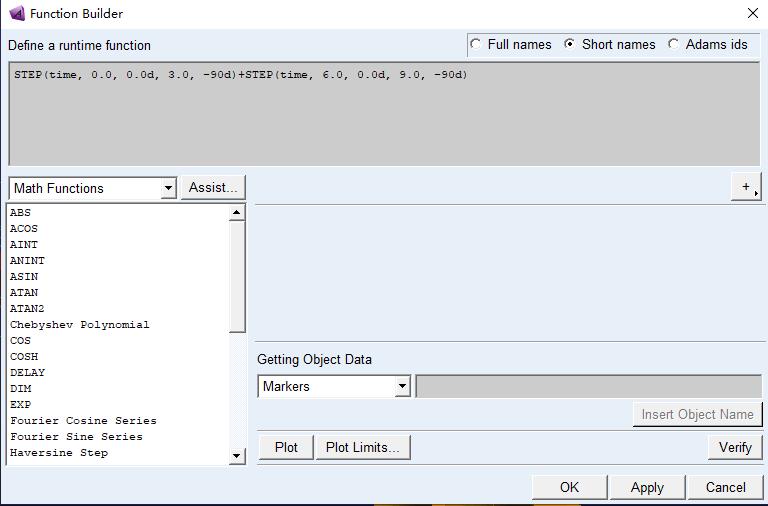
图4关节1驱动函数
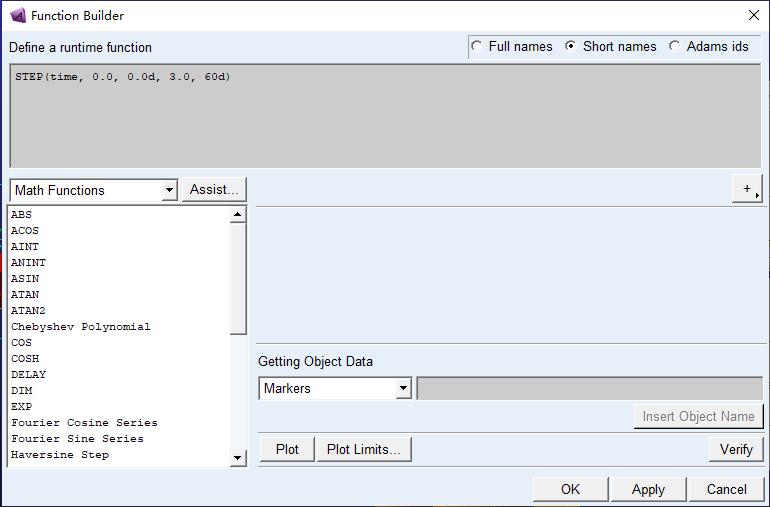
图5 关节2驱动函数
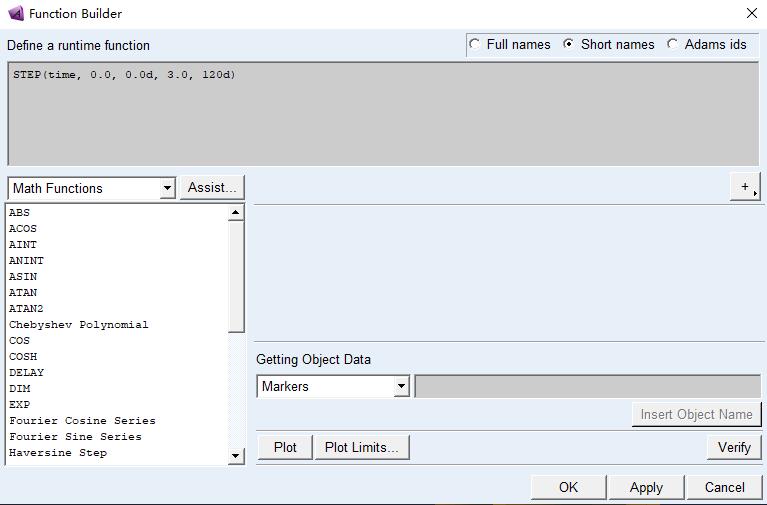
图6 关节3驱动函数
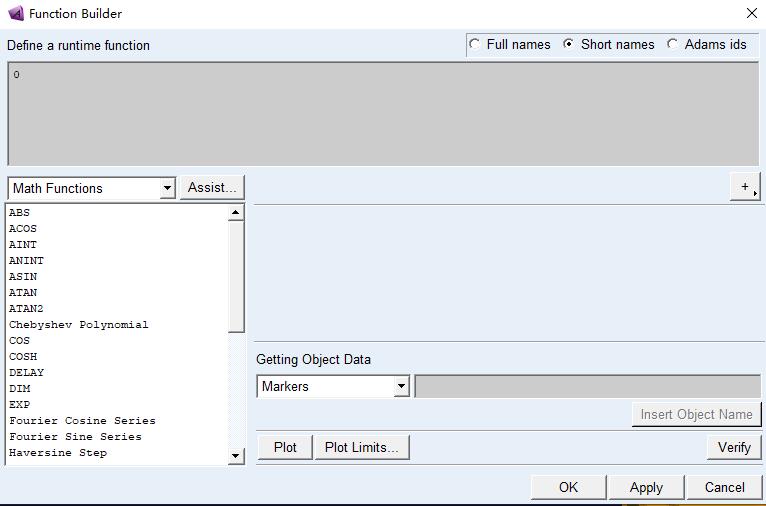
图7 关节4驱动函数
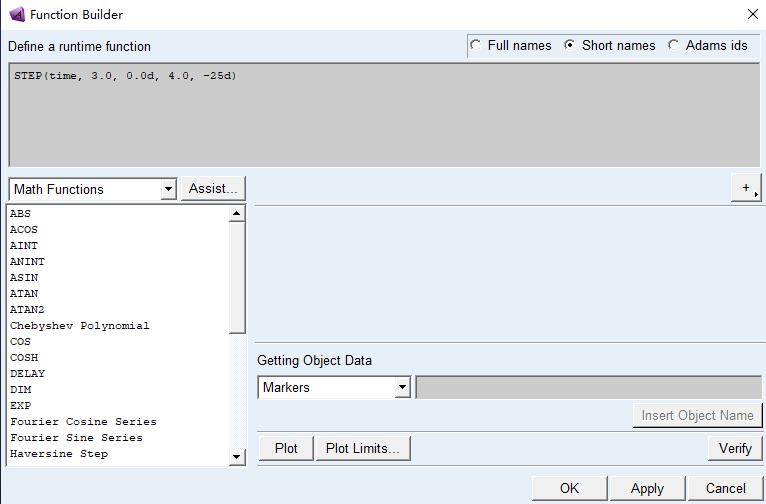
图8 关节5驱动函数
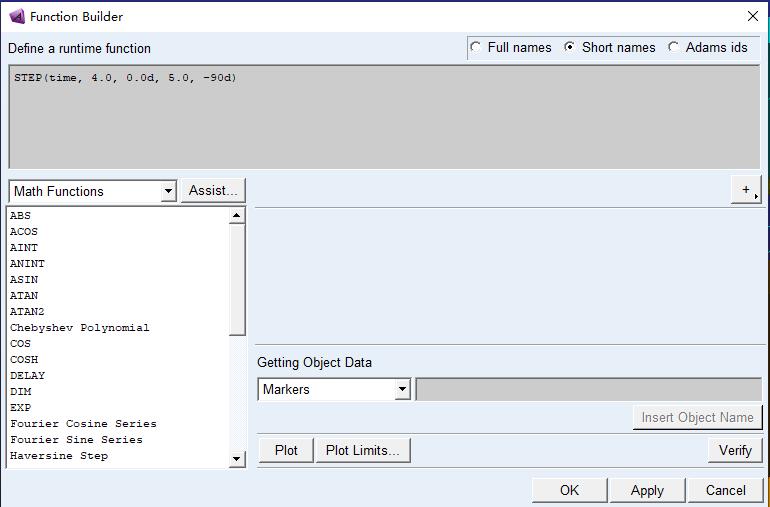
图9 关节6驱动函数
3.2求解设置
设置求解时间5s,求解步长300步,如图10所示,点击开始运行进行仿真。
图10 求解设置
4.1仿真动画
仿真结束之后便可以查看其运动动画,如图11所示。
图11 运动动画
4.2查看结果
图12为关节1扭矩值,图13为关节3扭矩值,图14为关节6扭矩值。
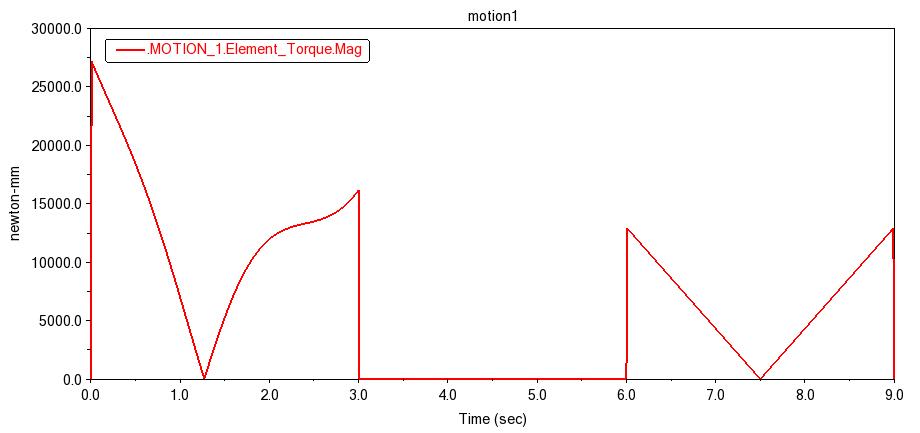
图12 关节1扭矩值
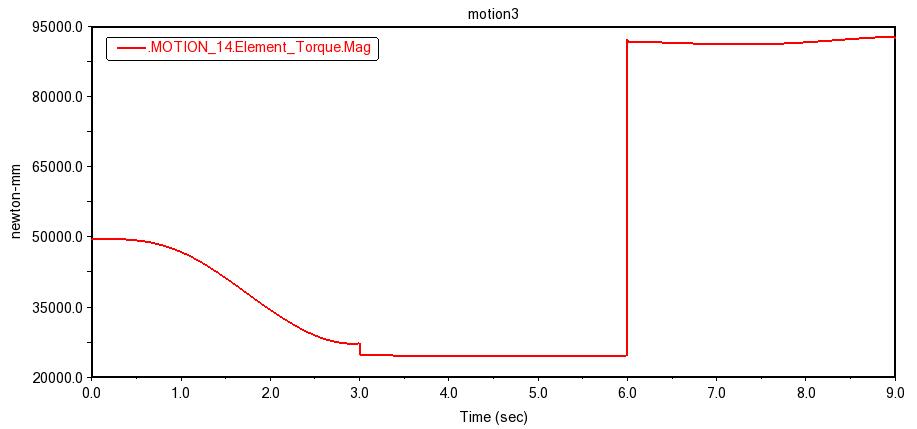
图13 关节3扭矩值
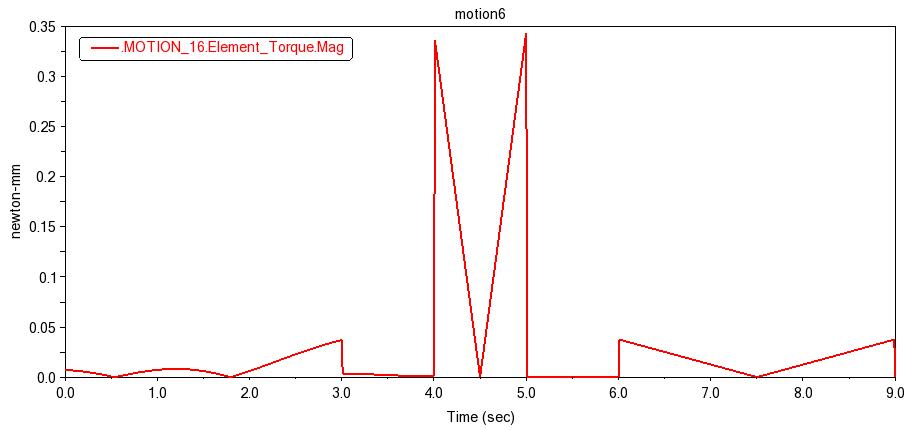
图14 关节6扭矩值
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















