















































软件

产品


摘要:
基于车辆-轨道耦合动力学及齿轮传动系统动力学理论,建立完整的考虑齿轮齿条动态啮合激励的齿轨车辆-轨道耦合动力学理论模型。提出了基于势能原理的齿轮齿条啮合刚度计算方法,并与 Simpack 自带的 225 号力元以及有限元法计算结果进行对比分析,表明提出的方法具有良好的精度与效率。
基于该动力学模型,分析了轨道随机不平顺激扰下齿轮齿条动态啮合力、齿轮角加速度、轮轨垂向力、车体加速度等动态响应特性,探究了齿条基体挠度变形对齿轨动态响应的影响,揭示了线路坡度以及行车速度对齿轨车辆动力学性能的影响规律。研究结果表明,提出的解析法和有限元法均能反映齿条基体挠度变形对齿轨动态响应低频特性的影响;
齿轮齿条啮合力、齿轮角加速度等齿轨啮合动态响应随线路坡度和行车速度的增加而增加;轮轨垂向力和横向力均方根值随运行速度的增加而增加;在分析的10~35 km/h 速度范围内,各轮对脱轨系数均小于 0.8(允许限值),车体垂向和横向平稳性指标均小于 2.5(优),满足相关标准对行车安全性与平稳性指标的要求。
关键词:齿轨列车;齿轮齿条传动;动力学分析;时变啮合刚度;轴重转移
0 前言
山地齿轨铁路是一种地形适应能力较强的轨道交通制式。与普通依靠轮轨黏着产生牵引力的铁路相比,山地齿轨铁路能够适应山区大坡度的地形特点和交通需求。这是由于齿轨铁路增加了齿轮齿条驱动装置,在铁路轨道中间增加齿条轨道,在列车转向架上装有齿轮传动装置,具有更大的牵引能力。
通过齿轮齿条啮合补充轮轨驱动力的不足或直接使用齿轮齿条啮合力替代轮轨黏着力牵引列车行驶,使得齿轨列车能在坡度超过 200‰的大坡道线路上运行并保证行驶可靠性与安全性。齿轨铁路在国外已经成功运行多年,已建成的齿轨线路达 180 条,总里程超 3 000 km,分布于美国、瑞士、法国、日本和澳大利亚等国家[1]。
1871 年开通的瑞士瑞吉山铁路是欧洲的第一条齿轨铁路。经过一百多年的发展,齿轨铁路已经衍生出多种齿轨形式,应用较为广泛的包括 Riggenbach、Marsh、Abt、Strub 及 Locher等几种形式。
齿轨铁路凭借其出色的爬坡能力使其成为我国山地旅游交通新的出行方式之一,具有良好的工程应用前景。目前,国内都江堰、张家界和九寨沟等地也在积极规划修建用于景区旅游观光的齿轨铁路,如都江堰至四姑娘山旅游扶贫线、张家界七星山齿轨项目等[2],齿轨相关的行业标准也已正式发布。
针对齿轨铁路交通,部分学者进行了前期研究和分析,例如,牛悦丞等[3]介绍了齿轨铁路关键技术,总结了常见齿轨车辆及轨道的特点,分析了未来国内齿轨车辆的发展方向;尚勤等[4]分析了不同齿轨系统的特点及适用条件,通过对齿轨车辆新技术的分析,提出了齿轨车辆的发展趋势;潘相楠等[5]介绍了国内外齿轨铁路发展现状,分析了不同齿轨制式的特点及适用情况;
CHEN 等[6]建立了考虑齿轮齿条非线性接触和轮轨非线性的齿轨空间模型,探究了牵引电机布置模式对齿轨动态特性的影响。
齿轮齿条传动是齿轨铁路与普通铁路最显著的区别,也是齿轨列车实现大坡道线路运行的关键装置。针对齿轮齿条传动系统,已开展了较多的研究工作。
例如,冯定等[7]以齿轮齿条钻机平台为对象,建立了大模数齿轮齿条啮合有限元模型,研究了接触应力和应变分布情况;黄鸿鑫等[8]以大型机床刀架进给装置中的齿轮齿条装置为研究对象,对轴向调隙后变厚齿轮齿条的静态传递误差、接触应力、接触力等进行了有限元分析;王明旭等[9]利用ABAQUS 对大模数渐开线直齿齿轮齿条进行了静力学与动力学强度分析,研究了齿轮齿条的非线性接触问题。时变啮合刚度是齿轮传动系统动力学的重要参数,也是系统内部一种主要的激励源,对系统振动噪声水平有着明显的影响。目前,关于齿轮传动时变啮合刚度的准确计算,已有大量学者已开展和正在开展相关研究工作。
例如,YANG 等[10]通过势能原理计算了齿轮时变啮合刚度,SAINSOT等[11]提出了一种考虑实际轮体结构的齿轮基体刚度修正模型。基于 SAINSOT 建立的齿轮基体修正模型,CHEN 等[12-14]和 CHAARI 等[15]考虑齿轮轮齿及轮体弹性变形,获得了正常齿轮和具有裂纹故障齿轮的时变啮合刚度。
万志国等[16]对时变啮合刚度算法进行了优化修正,开展了齿轮齿根裂纹故障的动力学分析。CHEN 等[17-18]充分考虑轮齿误差以及轮体变形的影响,提出了轮齿误差以及齿间耦合效应影响下的齿轮时变啮合刚度计算方法,构建了考虑齿间耦合效应的齿轮动力学仿真分析模型,揭示了齿间耦合效应对齿轮传动动态响应的影响规律。
目前,山地齿轨铁路的研究在我国尚处于起步阶段,虽然国内多地规划了齿轨线路,但至今还没有一条线路建成投入使用,当前针对齿轨的研究也多停留在齿轨不同制式适用性、可行性等方面的调研分析上,鲜有针对齿轨系统动力学特性开展相关研究的报道。
本文以山地齿轨交通车辆及轨道系统为研究对象,详细考虑了齿轮齿条啮合动态激励,建立了齿轨车-轨耦合系统多体动力学模型,开展了齿轨车辆牵引爬坡条件下的动力学仿真分析,研究了坡道及行车速度等参数对齿轨啮合动态特性、车辆运行安全性指标和平稳性指标的影响规律,为齿轨车辆动力学参数设计、齿轨结构参数设计、运营速度的合理确定等提供理论依据。
1 齿轨车辆-轨道耦合动力学模型
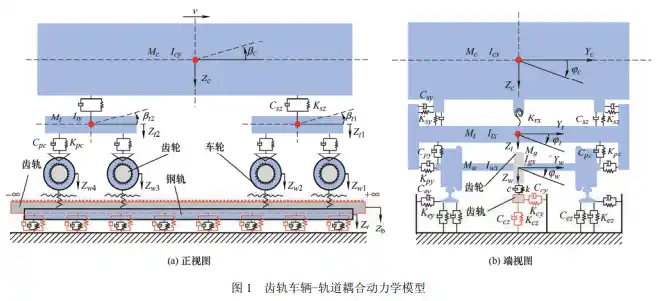
为研究齿轨车辆-轨道耦合系统动力学特性,本文基于车辆-轨道耦合动力学及齿轮系统动力学理论,建立了考虑齿轮齿条传动系统动态特性的齿轨车辆-轨道耦合动力学模型,如图 1 所示。
该模型包括车体(Mc、Ic)、构架(Mt、It)、轮对(Mw、Iw)、齿轮(Mg、Ig)和齿条等主要部件,车体、转向架构架、轮对等假设为刚体,具有 6 个方向的自由度;车体与转向架通过二系悬挂连接(Ks、Cs),构架与轮对通过一系悬挂连接(Kp、Cp),一系、二系悬挂由等效线性刚度和阻尼力元模拟,且对称布置于构架两侧;齿轮齿条啮合通过啮合刚度和阻尼等效(k、c);齿条位于两条钢轨中间,通过弹簧阻尼支撑(Kc、Cc);忽略齿轮支撑刚度,齿轮与车轴铰接。
1.1 基于 SIMPACK 的齿轨系统动力学建模
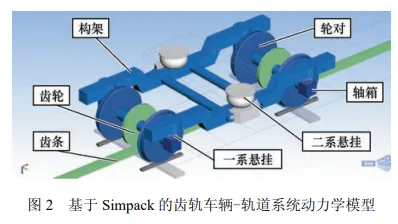
SIMPACK 是铁路领域广泛应用的动力学专业软件,本文也采用 SIMPACK 软件进行多体动力学建模,建立的齿轨车辆-轨道耦合动力学模型如图 2所示(为显示清晰,图中仅显示了单个转向架)。
建立正确的齿轮齿条啮合是齿轨动力学模型的关键,齿轮齿条啮合传动在 SIMPACK 中主要有两种实现方式,一种是直接使用软件集成的齿轮力元(225 号力元)模拟啮合过程,另一种是用户通过函数表达式、输入函数和移动 Marker 点等方式定义齿轮啮合力元,利用动态传递误差求解啮合力并通过 51 号力元输出[19]。
SIMPACK 软件包中自带的 225:Gear Pair 齿轮力元能够对齿轮啮合副的刚度、阻尼、摩擦等进行详细建模,同时能通过参数化建模和自定义轮廓实现齿轮修型,但对齿条支撑方式及齿条分段情况模拟有一定难度。
而使用移动 Marker 点定义啮合力元的方式中刚度曲线可以采用有限元法或解析法求出,可以更准确考虑齿条支撑方式、齿条基体变形等因素对啮合刚度的影响。
1.2 齿轮齿条时变啮合刚度计算
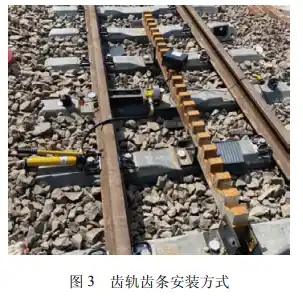
时变啮合刚度是齿轮传动系统中重要的内部激励之一,刚度值随啮合齿对数的变化而呈周期性波动。啮合刚度的计算可以采用解析法和有限元法,另外,SIMPACK 中自带的 225 号力元也能求解啮合刚度。齿条在轨道上的安装方式如图 3 所示。
1.2.1 基于势能原理的齿轮齿条啮合刚度计算方法
齿轮齿条时变啮合刚度可分解为齿轮刚度和齿条刚度。齿轮刚度可以分解为弯曲刚度 kb、剪切刚度 ks、轴向压缩刚度 ka、齿基刚度 kf,由材料力学中应变能公式可得[12-14]

式中,F 为啮合力,Ub 为轮齿弯曲势能,Us 为轮齿剪切势能,Ua 为压缩势能,Uf 为齿基变形势能。所以储存在齿轮中总的势能为

所以齿轮单齿刚度 kc可表示为

与齿轮刚度类似,齿条刚度也可分解为弯曲刚度 kw、剪切刚度 kj、轴向压缩刚度 ky、齿条基体刚度 kt,所以齿条单齿刚度 kr可表示为

式中,kt 主要通过齿条挠度变形和压缩变形求得,利用挠度叠加进行求解,齿条受力如图 4 所示。
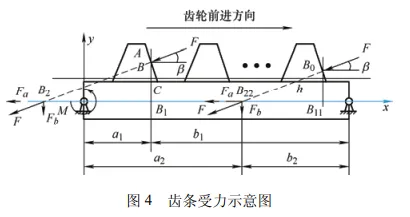
当啮合力延长线与齿条基体中心线交点在基体外时,啮合位置处 x、y 方向的位移分别为
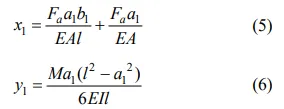
式中,E 为弹性模量,A 为齿条基体横截面积,l 为齿条长度,M 为啮合力等效到齿条左端的转矩。当交点在齿条基体内时,啮合位置处 x、y 方向的位移分别为
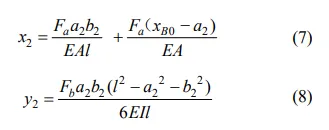
所以,根据叠加原理,齿条基体刚度可以表示为
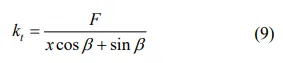
式中,β 为压力角,x、y 分别为齿条基体的轴向和垂向压缩变形。当啮合力延长线与齿条基体中心线交点在基体外时 x 等于 x1、y 等于 y1,当啮合力延长线与齿条基体中心线交点在基体内时 x 等于 x2、y等于 y2。对于齿轮齿条啮合,重合度 2<ε<3,啮合刚度可表示为
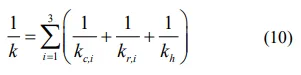
式中,kh 为齿轮齿条赫兹接触刚度,i=1 表示第一对齿啮合刚度,i=2 表示第二对齿啮合刚度,i=3 表示第三对齿啮合刚度。
1.2.2 基于 SIMPACK 中 225 号力元的齿轮齿条啮合刚度计算
225 号力元是 SIMPACK 中处理齿轮副接触的专用力元,根据输入的齿轮参数,按照标准 DIN3990-1—1987 求解齿轮啮合刚度,能够对直齿、斜齿、锥齿及齿轮齿条进行建模仿真,同时详细考虑齿轮副的变位系数、摩檫系数以及齿面修型的影响。
1.2.3 基于有限元法的齿轮齿条啮合刚度计算
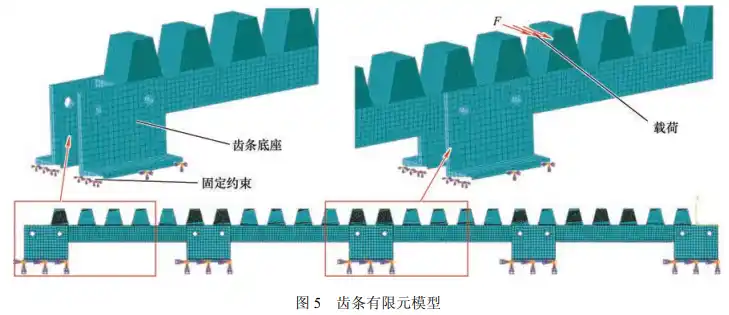
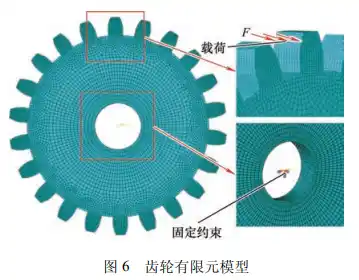
利用有限元分析软件 ABAQUS 中建立齿轮齿条有限元模型,有限元建模及静力学分析方法参考文献[20]中的分析方法进行,通过提取模型的应变能,利用应变能公式得到啮合刚度。模型采用C3D8R 六面体网格,根据齿轨列车齿轮齿条传递的载荷大小,分别在齿轮齿条各啮合位置上沿啮合线方向施加大小为 5 kN 的载荷,建立的有限元模型如 图 5、6 所示。
2 齿轨车辆-轨道系统动力学特性分析
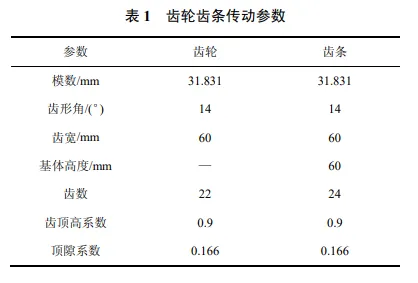
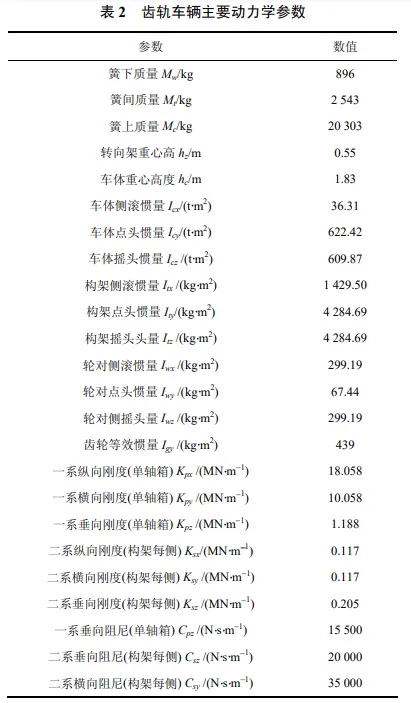
本节基于某型山地齿轨车辆设计参数(表 1、2),基于前一节建立的齿轨车辆-轨道耦合系统动力学模型,开展系统动力学特性研究。在本文研究中,考虑了钢轨随机不平顺的影响,施加波长范围为 0.5~50 m 的美国五级谱,而齿条轨道的不平顺未详细建模,仅考虑了齿条在载荷作用下的挠度变形。
本文研究的齿轨系统的动力学性能主要包括齿轨啮合系统动态特性(啮合力、齿轮角加速度)、运行安全性(轮轨力、脱轨系数)、乘坐舒适性(车体振动加速度、平稳性指标)等三方面的指标参数。
根据国家标准 GB/T 5599—2019[21]规定,针对客车和动车组,在曲线半径大于 400 m 的工况中,为防止脱轨,脱轨系数应满足

式中,Q 为某时刻作用于车轮上的横向力,P 为某时刻作用于车轮上的垂向力。
列车平稳性指标计算公式为[21]
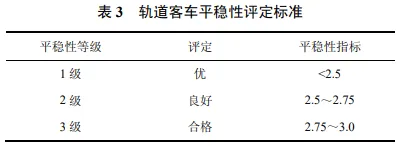
式中,W 为平稳性指标,A 为振动加速度(g),f 为振动频率,F(f)为频率修正函数。轨道客车平稳性评定等级如表 3 所示[21]。
同时,为了反映系统动态性能,本文也采用均方根(RMS)来评估动态波动的剧烈程度,其计算式为[22]
式中,N 为信号长度, x 为信号均值。
2.1 齿条基体挠度变形对齿轨动态响应的影响
本节利用 225 号力元、解析法和有限元法进行齿轮齿条啮合刚度求解,并将得到的刚度曲线通过移动 Marker 点输入耦合模型中,对比三种啮合建模方式对齿轨动态响应的影响,同时探究齿条基体挠度变形的影响。计算工况中线路坡度设置为 100‰,齿轨车以 30 km/h 的速度匀速行驶。
得到的齿轮齿条时变啮合刚度曲线如图 7 所示,从图中可以看出解析法和有限元法求解的刚度曲线除了啮合齿数变化引起的双齿与三齿交替波动外还有明显的由于离散支撑齿条挠度变形引起的啮合刚度周期性低频波动,而 225 号力元计算获得的啮合刚度仅能反映啮合齿数的变化,难以反映齿条挠度的影响。
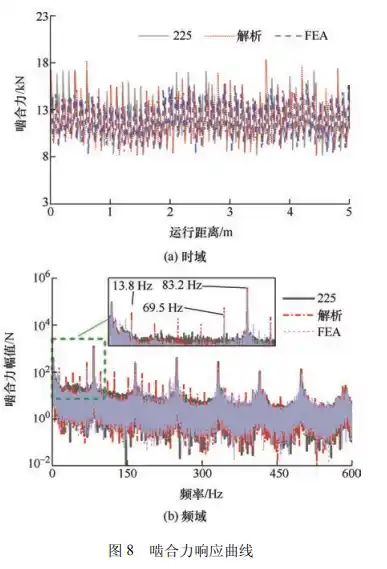
采用本文建立的耦合动力学模型仿真计算获得不同齿条刚度下的动态啮合力时域曲线如图 8a 所示。通过数据统计,利用 225 号力元时所得啮合力最大值为 19.78 kN,最小值为 6.41 kN,均值为11.51 kN,方均根值为 1.76 kN;利用解析法时所得啮合力最大值为 20.41 kN,最小值为 6.27 kN,均值为 11.49 kN,方均根值为 1.79 kN;利用有限元法所得啮合力最大值为 18.11 kN,最小值为 6.46 kN,均值为 11.50 kN,方均根值为 1.65 kN。由此可见,三种建模方式对啮合力时域统计值影响较小。
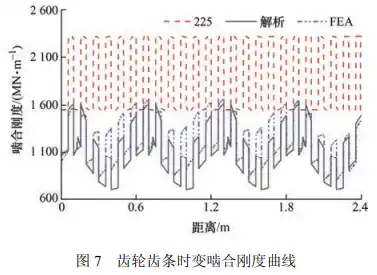
图 8b 为齿轮齿条动态啮合力频谱曲线,由图可知,利用 225 号力元进行齿轮齿条啮合建模时啮合力频谱主要为 83.2 Hz 的啮合频率及其谐波成分,对应的基波幅值为 1 249 N;利用解析法进行啮合建模时啮合力频谱主要包括幅值为180 N的齿条通过频率(13.8 Hz)和幅值为 1 437 N 的齿轮齿条啮合频率(83.2Hz);
利用有限元进行啮合建模时啮合力主要频率为齿条支撑通过频率 13.8 Hz 和齿轮齿条啮合频率83.3 Hz 及其倍频成分,对应的基频幅值分别为 87 N 和 1 094 N。
由于有限元法和解析法考虑了齿条挠度变形,所以频谱中出现了齿条支撑通过频率,而且在啮合频率及其倍频成分两侧还出现了以13.8 Hz 为间隔的边频带,该频率为齿条支撑通过频率(间隔 0.6 m),表明齿轮齿条啮合力被齿条通过频率对应的信号所调制。
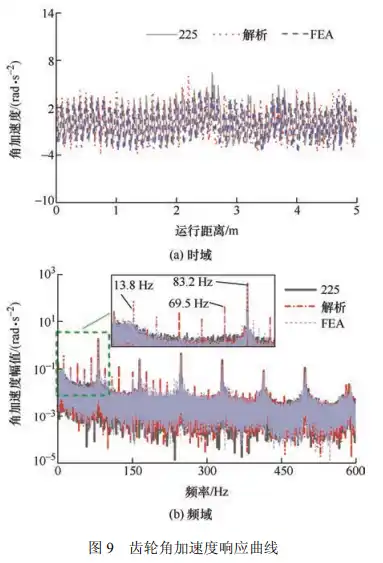
齿轮角加速度时域和频域响应曲线如图 9 所示,其中图 9a 为时域响应结果,图 9b 为频域响应结果。在时域上,三种方法求解的齿轮角加速度差异不大;
在频域上,有限元法和解析法的响应结果中都出现了大小为 13.8 Hz 的齿条支撑通过频率,而且在啮合频率及其倍频两侧还出现了以 13.8 Hz为间隔的边频带,表明齿轮角加速度被齿条支撑通过频率所调制。
齿轮齿条啮合对轮对垂向和横向振动加速度差异较小,但对纵向振动有明显影响,如图 10 所示,其中图 10a 为时域响应结果,图 10b 为频域响应结果。在时域响应上,225 号力元求解时轮对纵向加速度较大,加速度最大值为 2.37 m/s2,方均根值为0.55 m/s2;
解析法求解时纵向加速度最大值为2.038 m/s2,方均根值为 0.58 m/s2;有限元法求解时加速度最大值为 1.95 m/s2,方均根值为 0.52 m/s2。在频域响应上,有限元法和解析法对应的振动加速度低频幅值明显增加,出现了频率为 13.8 Hz 的齿条支撑通过频率。
对比三种齿轮齿条啮合建模下的齿轨动态响应,在时域上,啮合力、齿轮角加速度和轮对纵向振动加速度等动态响应差异较小;
在频域上,响应的低频特性差异较大,解析法和有限元法都出现大小为 13.8 Hz 的齿条支撑通过频率,并且啮合频率都被齿条支撑通过频率对应的信号所调制,而 225号力元求解时该频率成分不明显,其原因在于解析法和有限元法求解啮合刚度时能反映齿条支撑及挠度变形对结果的影响,而 225 号力元在求解刚度时难以考虑齿条在多点支撑下的挠度变形。

2.2 齿轨车辆爬坡运行动态响应特性分析
齿轨车辆在爬坡线路上运行时依靠齿轮齿条进行驱动,本节研究线路坡度及运行速度对齿轨动态响应的影响。
2.2.1 线路坡度对齿轨动态响应的影响
计算工况中,齿轨车以 20 km/h 速度匀速运行,线路坡度分为 50‰、100‰、150‰、200‰、250‰,研究在不同坡度下齿轨车的动态响应。根据仿真计算结果,线路坡度对齿轨车体加速度等响应的影响不明显,所以本小节重点研究齿轨啮合系统在坡度变化下的响应特性。
图 11 为不同坡度下齿轮角加速度方均根统计结果,从图中可以看出,齿轮角加速度随着线路坡度的增加而增加,线路坡度由 50‰增加到 250‰时,齿轮角加速度由 1.30 rad/s2增加为 4.68 rad/s2,约为3.6 倍。
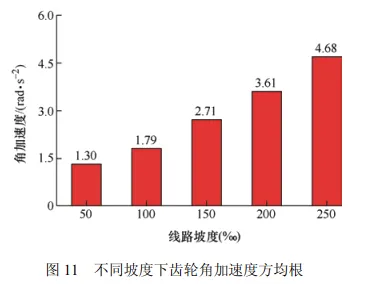
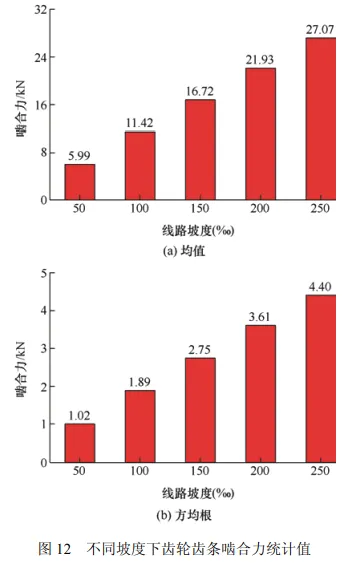
图 12 为不同坡度下齿轮齿条啮合力统计值,其中图 12a 为啮合力均值,图 12b 为啮合力方均根值。可以看出,线路坡度对齿轮齿条啮合力影响明显,随着线路坡度的增加,啮合力均值和方均根值分别由 5.99 kN、1.02 kN 增加到 27.07 kN、4.40 kN。
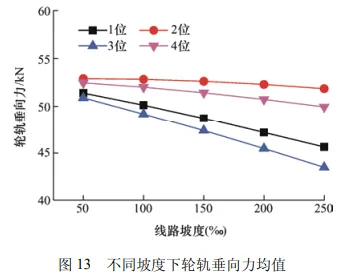
坡度变化对轮轨垂向力方均根值影响较小,但对均值有明显影响,图 13 为不同线路坡度下轮轨垂向力均值统计结果,从图中可以看出,轮轨垂向力均值随线路坡度的增加而减小,并且 1、3 位轮对轮轨垂向力的减小量大于 2、4 位轮对。随着线路坡度的增加,轮轨垂向力差值也增加,说明齿轨在坡道行驶时存在轴重转移并且坡度越大轴重转移越明显。当坡度为 50‰时,1、2 位轮轨垂向力差值为1.52 kN,与静轴重的比值约为 2.9%,3、4 位轮轨垂向力差值为 1.57 kN,与静轴重的比值约为 3.0%;坡度为 250‰时,1、2 位轮轨垂向力差值为 6.22 kN,与静轴重的比值约为 11.8%,3、4 位轮轨垂向力差值为 6.46 kN,与静轴重的比值约为 12.2%。
2.2.2 运行速度对齿轨动态响应的影响
该工况下,齿轨车分别以 10 km/h、15 km/h、20 km/h、25 km/h、30 km/h 和 35 km/h 的速度匀速运行,线路坡度为 100‰,以研究在爬坡线路中不同速度下齿轨车的动态响应。
图 14 为不同运行速度下车体加速度均方根统计,对比可以看出,车体加速度随运行速度的增加而增加,当运行速度由 10 km/h 增加到 35 km/h 时,车体垂向加速度由 0.018 m/s2增加到 0.082 m/s2,车体横向加速度由 0.011 m/s2增加到 0.063 m/s2,车体纵向加速度由 0.028 m/s2增加到 0.088 m/s2。
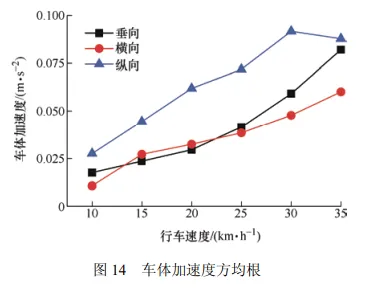
图 15 为不同运行速度下齿轨车辆运行平稳性指标计算结果,从图中可以看出,垂向和横向平稳性指标随运行速度的增加而增加。当车辆运行速度由 10 km/h 增加到 35 km/h 时,垂向平稳性指标由0.91 增加到 1.50,横向平稳性由 0.85 增加到 1.45。根据 GB/T 5599—2019[21]中的相关限值,平稳性指标满足 1 级(优)标准。
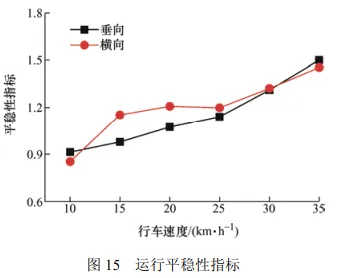
图 16 为运行速度为 35 km/h 时 1、2 为轮对脱轨系数,可以看出 1 位轮对脱轨系数大于 2 位轮对脱轨系数。图 17 为齿轨在不同运行速度下各轮对脱轨系数的最大值,可以看出 1、3 位轮对脱轨系数大于 2、4 位轮对脱轨系数。根据 GB/T 5599—2019[21]中的相关规定,脱轨系数须小于 0.8,在计算的所有速度工况中,脱轨系数均满足这一限值要求。
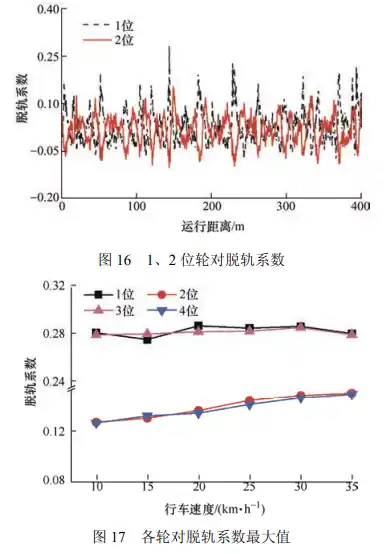
图 18 为不同运行速度下齿轨各轮对轮轨横向力均方根值统计结果,从图中可以看出,2、4 位轮对轮轨横向力随运行速度的增加而增加。当运行速度由 10 km/h 增加到 35 km/h 时,2 位轮轨横向力均方根由 2.03 kN 增加到 2.34 kN,4 位轮轨横向力均方根值由 2.04 kN 增加到 2.35 kN。
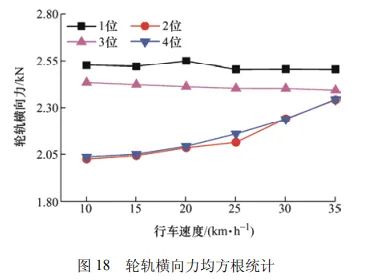
图 19 为不同速度下齿轮角加速度方均根统计结果,从图中可以看出齿轮角加速度随着行车速度的增加而增加,当速度由 10 km/h 增加到 35 km/h时,角加速度均方根由 1.22 rad/s2增加为 2.24 rad/s2,约为 1.8 倍。
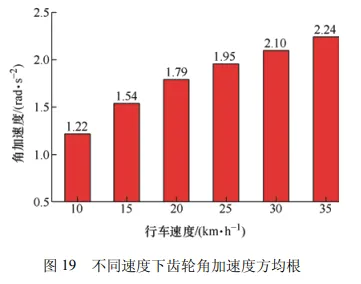
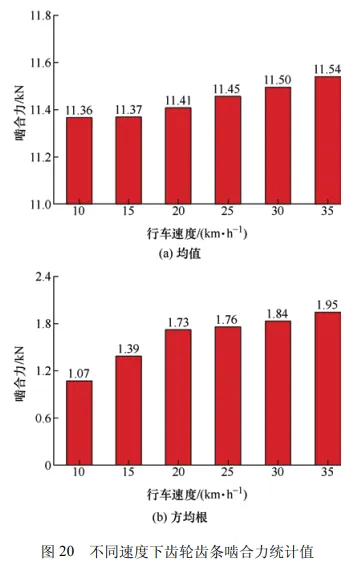
图 20 为不同行车速度下齿轮齿条啮合力统计值结果,其中图 20a 为啮合力均值,图 20b 为啮合力均方根值。从图中可以看出,运行速度对齿轮齿条啮合力影响规律明显,随着运行速度的增加,啮合力均值和方均根分别由 11.36 kN、1.07 kN 增加到11.54 kN、1.95 kN。
3 结论
本文针对某 Strub 型山地齿轨车辆,基于轨道车辆动力学及齿轮系统动力学理论,建立了齿轨车辆-轨道耦合系统动力学模型,提出了基于势能原理的齿轮齿条啮合刚度解析计算方法。基于该模型,研究了齿轨车辆牵引爬坡运行时的动态响应,对比了齿条挠度变形对齿轨系统动态响应的影响,揭示了线路坡度及运行速度对齿轨车辆动力学特性的影响规律。
1) 提出的基于势能原理的齿轮齿条啮合刚度解析计算方法能准确反映齿条支撑及挠度变形对啮合刚度的影响,与有限元法计算的结果吻合良好,验证了所提方法的正确性。
2) 齿条基体变形对齿轨系统动态响应的低频振动影响明显,在频域上明显观察到了大小为13.8 Hz 的齿条支撑通过频率及其在啮合频率及倍频成分两侧形成的边频带。
3) 齿轨动态啮合力、齿轮角加速度等动态啮合响应结果随线路坡度和运行速度的增加而增加,在分析的 10 km/h 至 35 km/h 速度范围内,齿轨车辆的脱轨系数和平稳性指标都满足相关限值要求。
4) 在爬坡线路工况下齿轨车辆出现了轴重转移,并且随着线路坡度的增加,随着坡度由 50‰增加到 250‰,1、2 位轮轨垂向力差值与静轴重的比值由 2.9%增加至 11.8%,而 3、4 位轮轨垂向力差值与静轴重的比值由 3.0%增加至 12.2%。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















