软件

产品


1 概述
齿轮箱或其它齿轮传动产品中进行齿轮啮合仿真,通常把齿轮作为刚性体,把齿轮所在的轴作为柔性体,原因是轴的柔性对啮合性能结果的影响要远大于齿轮本身的柔性。但对于一些特殊齿轮,比如非金属齿轮、薄腹板齿轮、腹板带孔的齿轮等,其齿轮本身具有一定的柔性,并会对传动结果产生较大影响,应该把其作为柔性齿轮进行仿真。
同时借助有限元分析软件,Simpack还可以进行柔性齿轮仿真分析,考虑齿轮腹板的柔性对齿轮啮合性能的影响。本文详细介绍如何使用使用Simpack软件进行柔性齿轮建模和分析,同时介绍借助Abaqus齿轮插件工具快速生成柔性齿轮模型。
2 Simpack柔性齿轮介绍
Simpack 225齿轮副力元支持的齿轮类型有内齿轮和外齿轮,包括直齿轮、斜齿轮、锥齿轮。为了建立柔性齿轮,齿轮几何体必须定义为Flexible Body,并具有下面属性:
另外, 用户可以指定主节点位置的参考直径(如果没有指定, 则使用节圆直径)。
推荐使用两种建模方法用于主节点定义。使用这两种方法, 节点性能应该使用载荷分布多点约束(MPCs)定义。
3 建立刚体齿轮模型
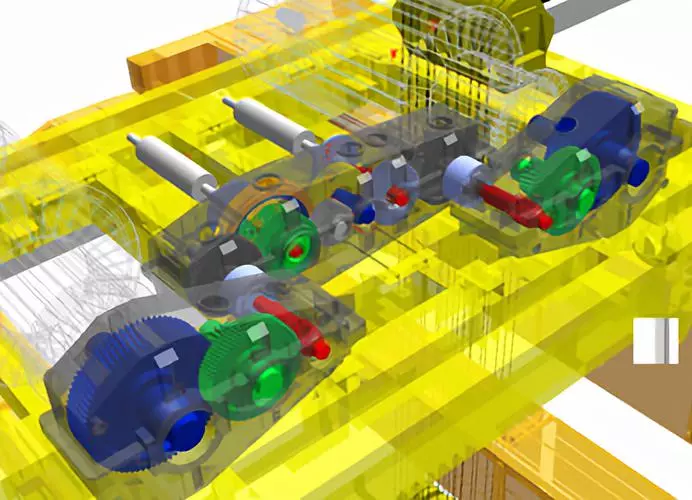
在Simpack新建模型,使用25:Gear Wheel建立齿轮几何体,不考虑齿轮修形和节圆误差。密度设置7850(钢铁),质量计算方式使用Auto,根据几何体和密度自动计算。
使用复制方式建立另一个齿轮部件,参数设置相同(注意:Helix angle要设置为相反数即0.13,以保证两个齿轮能正确啮合)。
分别设置铰接和力元,其中一个齿轮铰接通过27号铰接设置旋转速度,而另一个齿轮使用13号力元设置阻力。两个齿轮之间使用225力元建立啮合关系。
4 使用Abaqus插件建立齿轮有限元模型
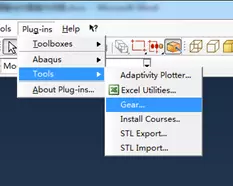
启动Abaqus软件并加载该插件程序,在Abaqus界面Plug-ins菜单下出现Gear命令。在启动Gear命令之前,请先设置Abaqus的工作路径(尽量不要使用中文路径)。
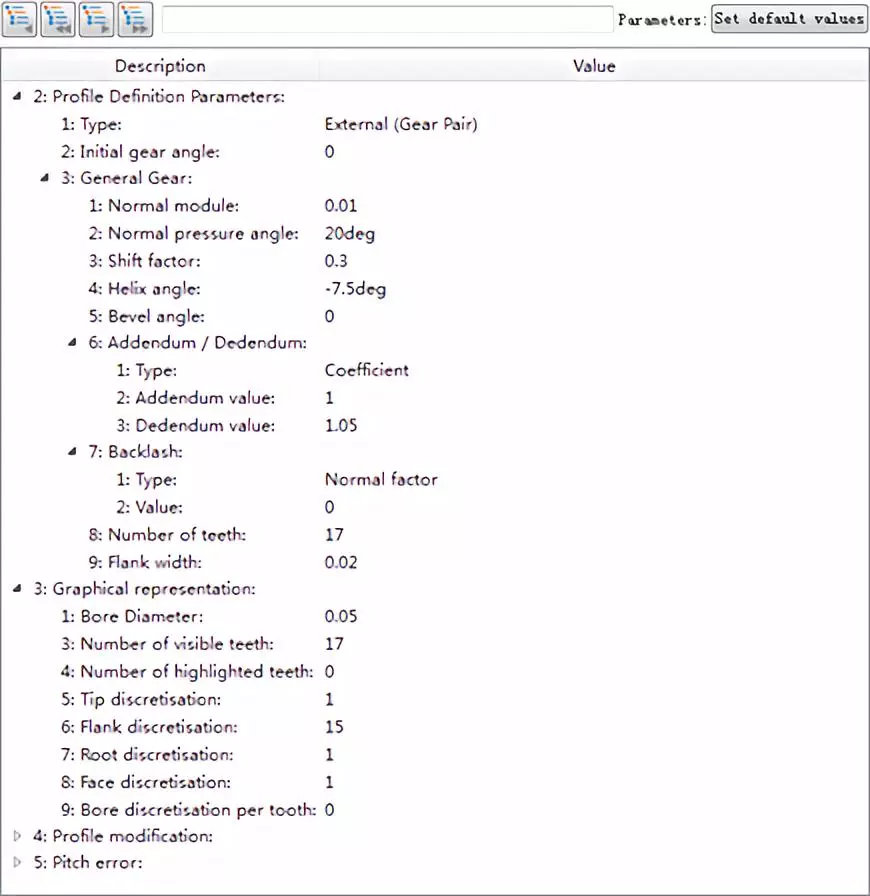
点击Gear命令,打开Gear Builder对话框,按照之前刚性齿轮的参数在该对话框中输入对应的参数,确保两者的参数保持一致。注意:Simpack长度默认单位是m,而该齿轮插件长度单位是mm。
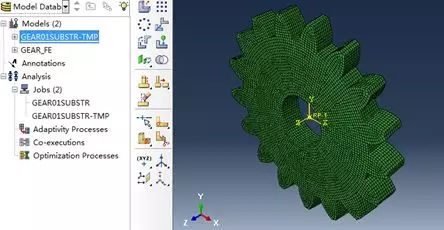
完成后点击OK按钮,Abaqus软件开始执行脚本程序,并生成齿轮有限元模型。
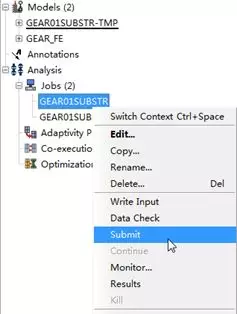
点击模型树Analysis下的GEAR01SUBSTR项并使用Submit命令提交计算。
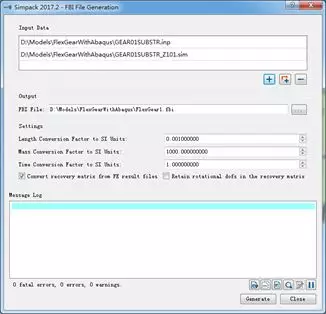
仿真完成后,在Abaqus工作路径文件夹下生成一系列文件。其中用于生成Simpack fbi柔性体是GEAR01SUBSTR.inp和GEAR01SUBSTR_Z101.sim两个文件。
在Abaqus中查询节点数据,得到节点参考半径值是88.73334mm
5 生成Simpack柔性体齿轮文件
在Simpack中,在Utilities菜单下选择FBI Files->Generation命令打开FBI生成对话框,按照下图选择输入文件并设置输出FBI文件的名称。注意:由于Abaqus和Simpack使用的单位不同,要准确输入单位转换系数。
6 建立柔性齿轮模型
打开之前已建立的RigidGear.spck模型文件,并另存为FlexGear.spck模型。在FlexGear.spck模型中进行下面的操作。
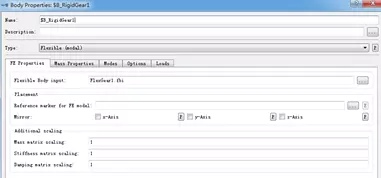
在Search Path中添加柔性齿轮fbi文件所在的目录。在$B_RigidGear1属性对话框中,修改为Type为Flexible(modal),并在Flexible Bodyinput中选择FlexGear1.fbi文件,并点击Apply按钮。
在Modes选项卡下,设置该柔性体模态为100。
把部件$B_RigidGear1重命名为$B_FlexGear1。该部件含有两个几何体,即刚体齿轮$P_FlexGear1_gear和柔体齿轮$P_FlexGear1_Flex,这两个几何体都必须保留,不能删除刚体几何体$P_FlexGear1_gear,因为Simpack 225齿轮力元要求必须输入刚体齿轮几何体模型。现在刚体齿轮和柔体齿轮重合在一起,模型显示如下。
打开$P_FlexGear1_gear属性,这时发现参数多了一个Flex Nodereference diameter项,该参数定义柔性齿轮的节点参考直径,在上述操作中我们得到该齿轮的节点参考半径是88.73334mm,那么在该对话框中输入0.0887334*2,完成后点击OK按钮保存。
打开$F_GearPair属性对话框,选择输入的齿轮几何体依然为刚体齿轮(Simpack自建的齿轮几何体)。在Calculation mode选项中,根据仿真目的选择合适的选项,本文选择flex. Gear1 incl.tooth def.,表示仿真时考虑柔性齿轮齿的变形。其它参数保持和刚体齿轮模型设置一致。
为了方便观察模型,把刚体齿轮几何体隐藏。完成后,保存模型。
7 仿真与后处理分析
设置求解参数为10s和200Hz,进行离线时域分析。仿真速度很快,仅用时25s即完成计算。
在Simpack Post中打开结果文件,显示动画与曲线。
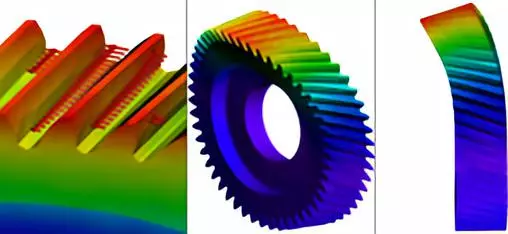
柔性齿轮变形云图
齿轮啮合力分布
绘制柔性齿轮的动态传递误差,并与刚性齿轮传递误差的结果进行对比。
备注:通过以上的操作过程,还不能直接在Simpack Post中观察应力信息,因为该fbi文件不含有应力信息。如果想在动画中观察到应力信息,有两个方法实现,下次再说。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020