软件

产品


橡胶减振器因其阻尼性能好、结构简单、价格低廉等优点,在航天、船舶、汽车等工程领域得到广泛应用。但由于橡胶复杂的非线性力学行为,缺乏准确的材料模型来描述其特性,使得橡胶减振器的选型和设计主要依靠工程经验和试验方法,耗费大量人力物力。随着有限元技术和计算机技术的发展,作为先进的非线性有限元软件一ABAQUS已经具备超弹性、粘弹性橡胶模型和体积不可压缩材料大变形的有限元计算功能,这为橡胶减振器的有限元分析提供了极大的便利。
橡胶减振器非线性有限元分析
1橡胶减振器非线性特性
橡胶减振器非线性主要来源于几何非线性、材料非线性、边界非线性。其中:
在ABAQUS中,几何非线性即大变形可在分析步 (Step) 中选择开启,开启后在分析过程中会考虑到几何非线性。材料库中有丰富的材料可供选择,对于橡胶材料可选择超弹性、粘弹性。ABAQUS中在相互作用 (Interaction) 内定义各部分之间的相互作用,对于边界非线性可定义橡胶与金属支架之间的接触,通过接触算法实现边界条件非线性和力的传递。
2橡胶材料参数的确定
在有限元方法中,常把橡胶近似视为不可压缩材料,使用超弹性本构模型描述其弹性能力,其中的Mooney-Rivlin本构模型如下
其中,I1、I2、I3是应变不变量,C10、C01、D1是由材料决定的常数。当D1=0时,橡胶完全不可压缩。Mooney-Rivlin模型可以仅使用C10、C01和D1三个常数,较精确地刻画在橡胶元件工作于中小应变时的弹性能力。
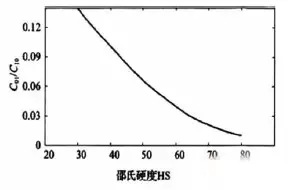
材料常数C10、C01和D1的确定,需要进行一系列的复杂试验。由超弹性材料常数C10、C01与橡胶的邵氏硬度HS有经验关系。而对于可自由变形的橡胶元件,其剪切模量G(MPa)与材料常数C10、C01有关系:
则对于选定硬度的橡胶材料,通过图确定C10、C01的值,在代入上式中,可以求解出材料常C10、C01。
图1 材料常数与邵氏硬度的经验关系
本文所用橡胶减振器橡胶为某型号硅橡胶,其弹性剪切模量为2MPa,邵氏硬度为50。
除了要定义橡胶的超弹性材料参数外,还需要定义材料阻尼以及粘弹性参数。在ABAQUS中提供了多种阻尼模型:瑞利阻尼、结构阻尼、模态阻尼、全局阻尼。对橡胶选择材料阻尼 (Damping) 中的瑞利阻尼。
由手册可确定该硅橡胶的损耗因子为0.2,根据损耗因子P与临界阻尼比β之间的关系:
可得临界阻尼比为0.1。为了方便计算需将临界阻尼比转化为瑞利阻尼。瑞利阻尼可表示为
其中,α为质量阻尼,β为刚度阻尼。对于单自由度系统,临界阻尼比与瑞利阻尼的关系为:
假设在低频段和高频段 (5Hz?400Hz),系统具有相差不大的临界阻尼比,则可确定瑞利阻尼值α=0.988,β=0.00049。
3建立橡胶减振器模型
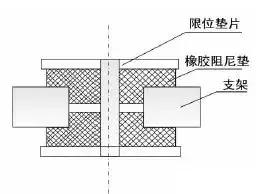
为了研究其减振性能,将T型橡胶减振器与支架结构和质量块组合在一起,结构如图2。将减振器整体几何模型导入Hypermesh中划分网格,然后导入ABAQUS中进行参数设置和分析。
图2 T型橡胶阻尼垫结构剖面图
在有限元模型中,由于垫片与橡胶在实际运动中发生较小的位移,所以它们之间的相互作用定义为绑定约束(Tie)4。橡胶垫与支架在实际运动中既有相对的位移,也有力的传递,所以它们之间的相互作用定义为面面接触 (SurfacetoSurface)。接触属性可定义接触面之间的法向行为和切向行为:
图3 单自由度橡胶减振器系统有限元模型
在有限元模型中,由于是非线性分析,所以在分析步中只能使用通用分析步 (General)。此处选用隐式动力学 (dynamic,Implicit)。增量步的值由ABAQUS自动控制,且设置允许最小增量步为0.001。在金属垫片处施加Y向1.12g的加速度扫频信号,信号的频率范围为5~400Hz,信号时长为4s,分辨率为1000Hz。边界条件的设置将限位垫片的X、Z向的自由度约束住。
4有限元分析结果
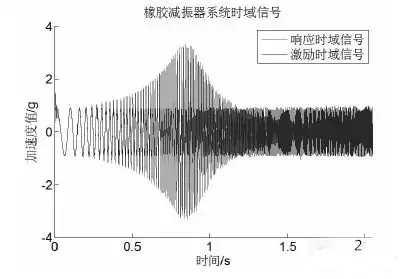
设定参数后,对单自由度橡胶减振器模型进行分析计算。仿真结果的前2s的时域信号如图4。
图4 橡胶减振器系统仿真时域数据
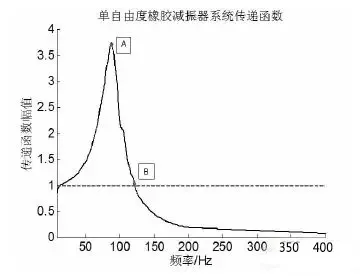
对时域信号在Matlab中以激励信号为输入信号、以响应信号为输出信号利用Tfestimate函数进行传递函数估计可得其频域关系,如图5。由图中可以看到减振器系统先会经历一段放大区即图中红线上部的区域,在这段区域内激励信号传递到质量块上端时会放大,然后系统在进入减振区即红线下部区域,该区域随着激励频率的增加,传递到质量块上的信号会衰减。同时由图中可以看到该橡胶减振系统的共振点为A点,系统固有频率为87.89Hz。图中传递函数幅值为1的直线(红色直线)与减振器曲线的交点为减振起始点即B点。
图5 橡胶减振系统传递函数
橡股减振器振动试验验证
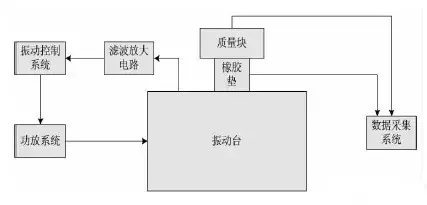
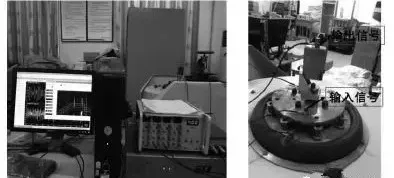
对单自由度橡胶减振器系统开展振动试验,分别在台面夹具上和质量块上安装加速度传感器,通过测量传感器的数据以夹具上的信号为输入信号、以质量块上的信号为输出信号。通过输入输出信号的传递函数考察共振频率和减振性能。通过振动试验来验证非线性有限元分析的准确性。
在正弦扫频试验中,振动台使用的是苏州试验仪器厂的DY-1000-8电动振动试验系统,控制系统使用的是STI-RC2000,数据采集系统使用的北京东方振动和噪声技术研究所的DASP数据采集系统。
图6 振动试验系统示意图
在试验中对系统施加1.12g的线性扫频加速度激励信号,频率范围为5~400Hz。测试结果如图8。
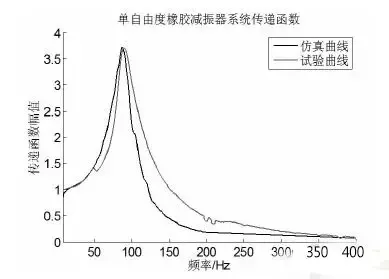
图7 单自由度橡胶减振器系统传递函数
通过试验曲线可得该单自由度橡胶减振器系统的共振频率为89Hz,试验值与仿真值的相对误差为1.25%。仿真曲线与试验曲线在峰值处吻合的比较好,在共振点之后的衰减梯度上有一定误差,从仿真过程来看可能是橡胶与支架接触的接触属性设置上存在误差。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020