















































软件

产品


默认已经画好零件图,并将零件图都装配在一起。
图1
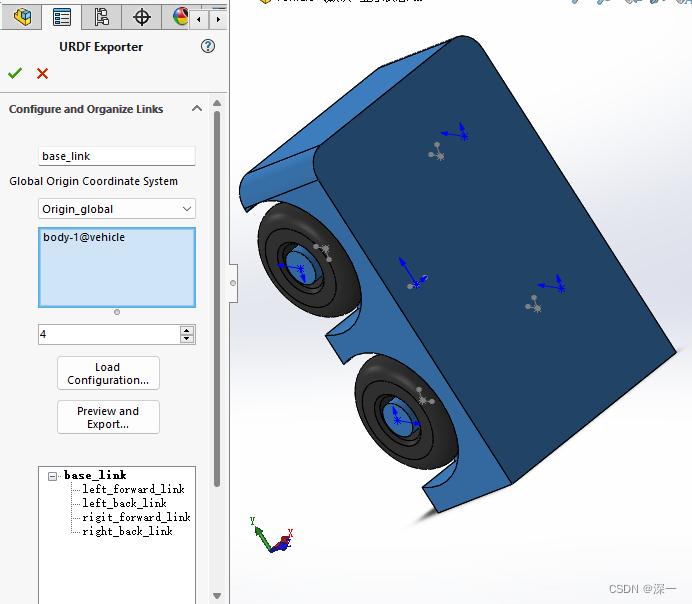
图2
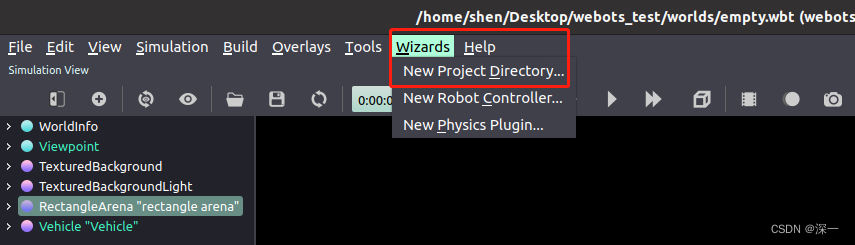
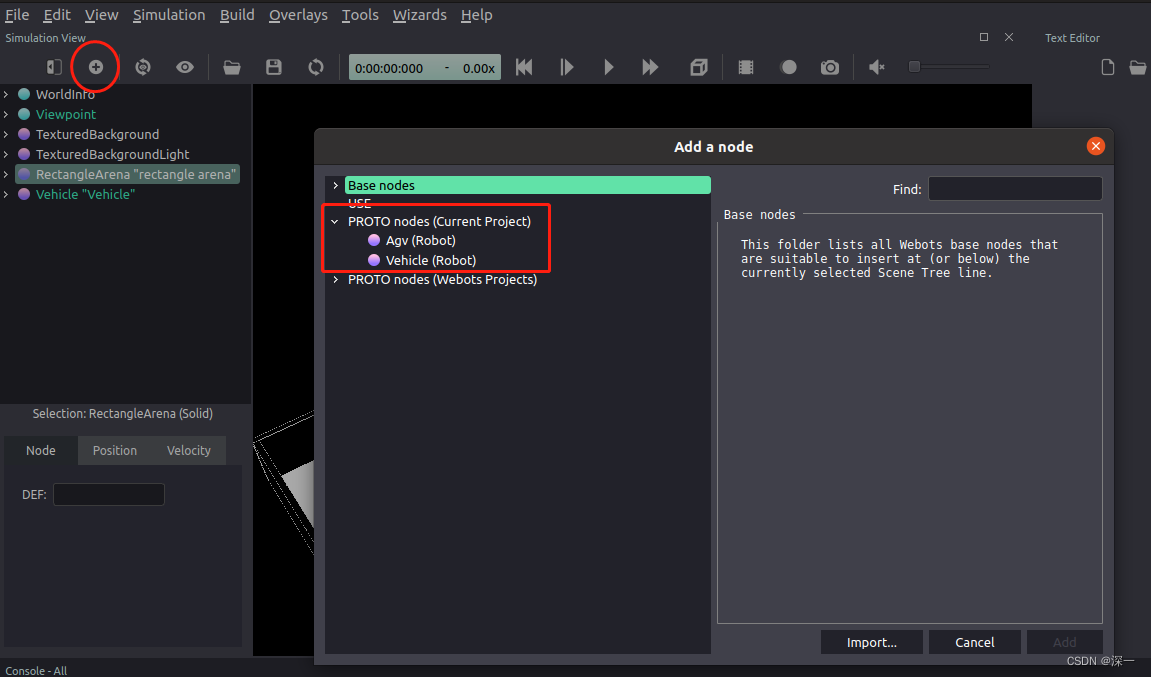
solidworks将所有的零部件生成STL模型并保存在"meshs"文件夹下,urdf模型通过文件路径找到对应的STL模型,由于solidworks是在windows下使用,urdf中的模型对应的STL模型文件路径不满足要求,需要进行修改,通常只需要将urdf文件中“package://vehicle”替换成“ . . .. ..”即可。
pip3 install urdf2webots
python3 -m urdf2webots.importer --input=文件名称.urdf
以上过程中,不要移动urdf文件中所有文件的位置,防止找不到模型对应的STL文件。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















