















































软件

产品


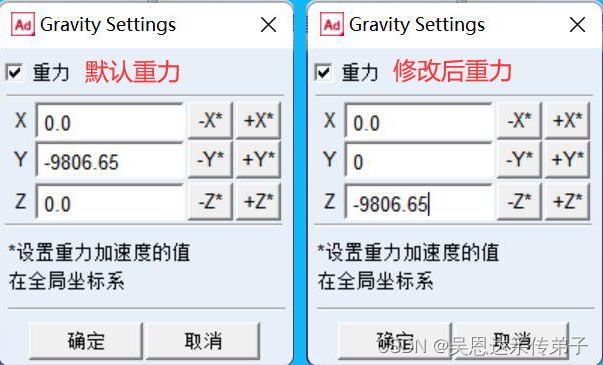
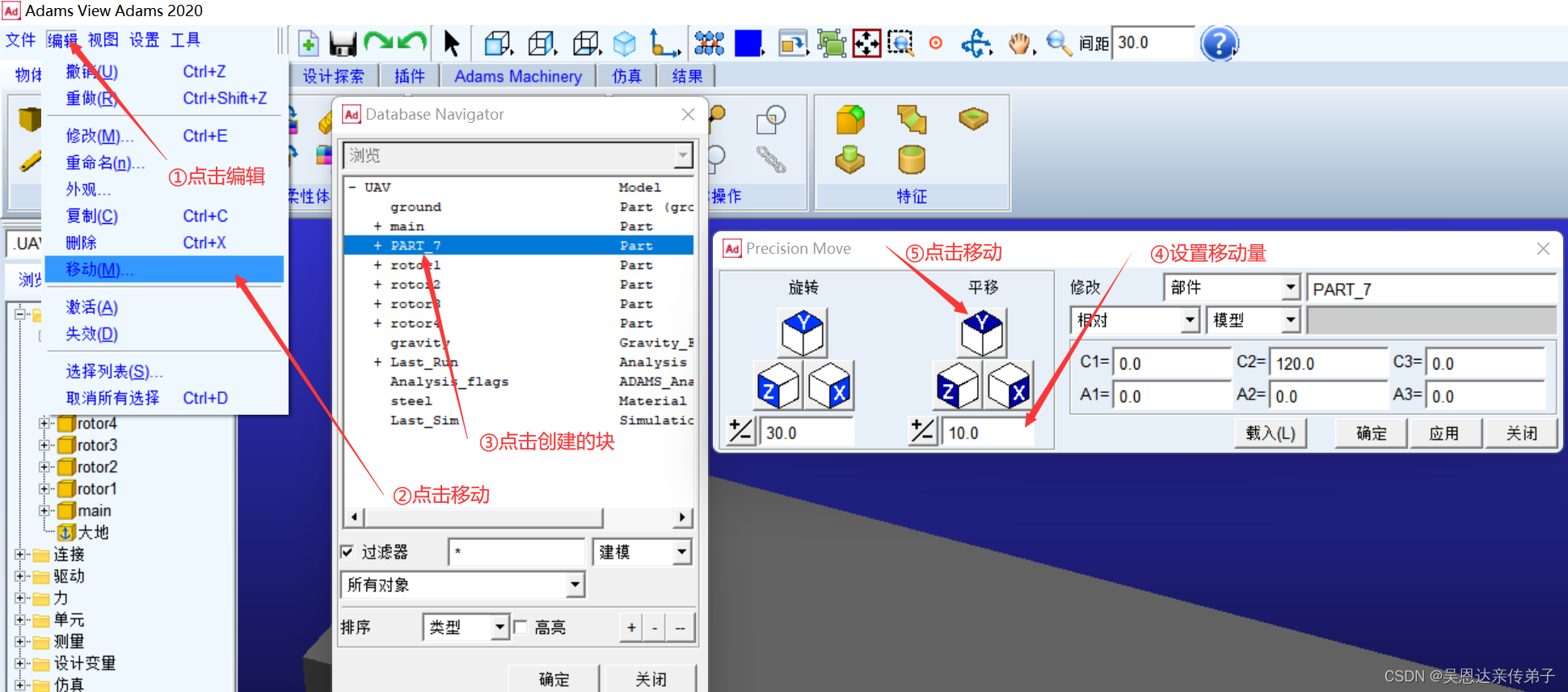
上文提到重力在进入软件后进行设置,因为在Solidworks中,我们的装配体是x轴为正方向,z轴为垂直方向,所以设置重力方向为z轴反方向。
绿色按钮仿真一下看看,如果没问题,那飞机应该垂直哐当往下掉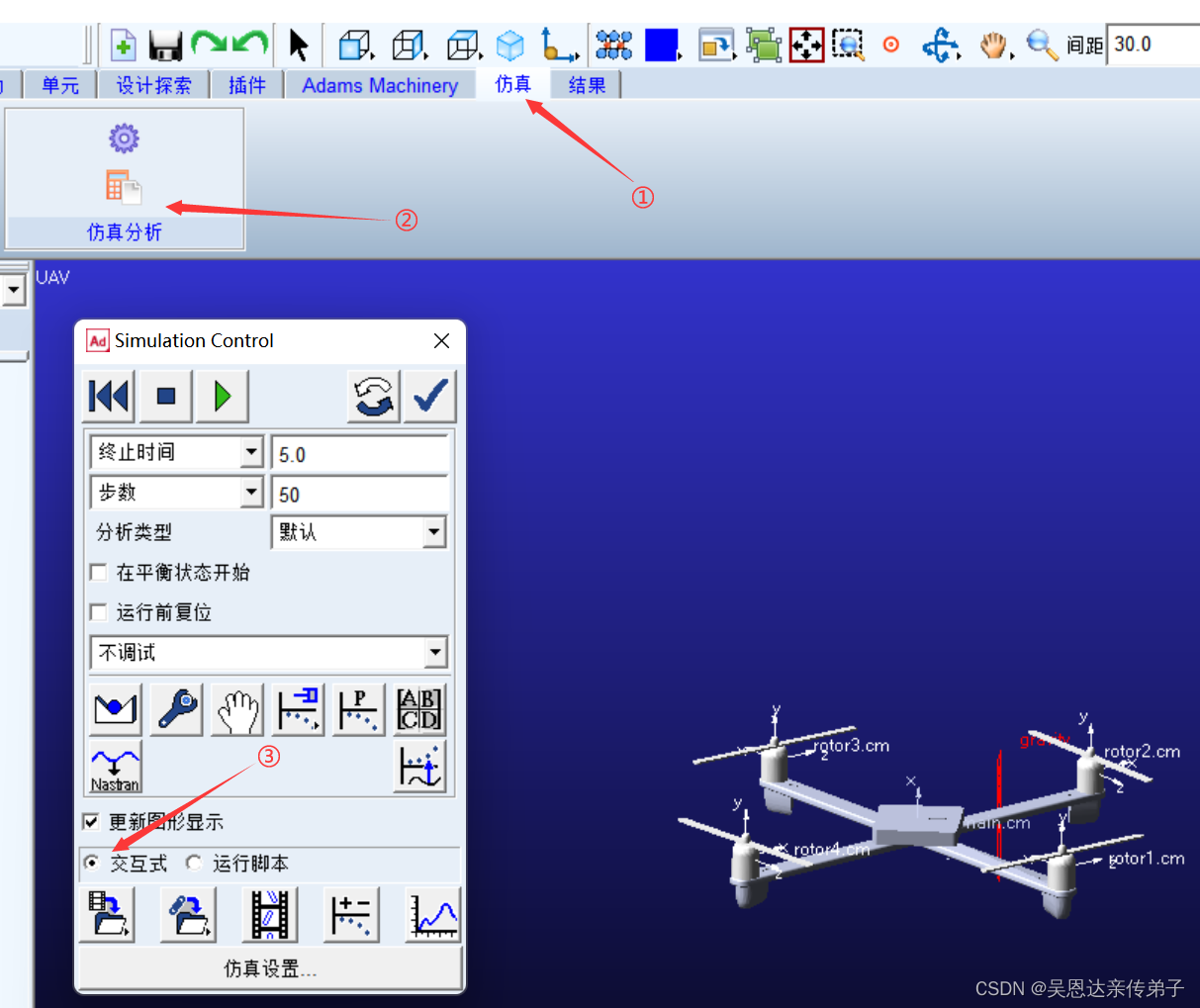


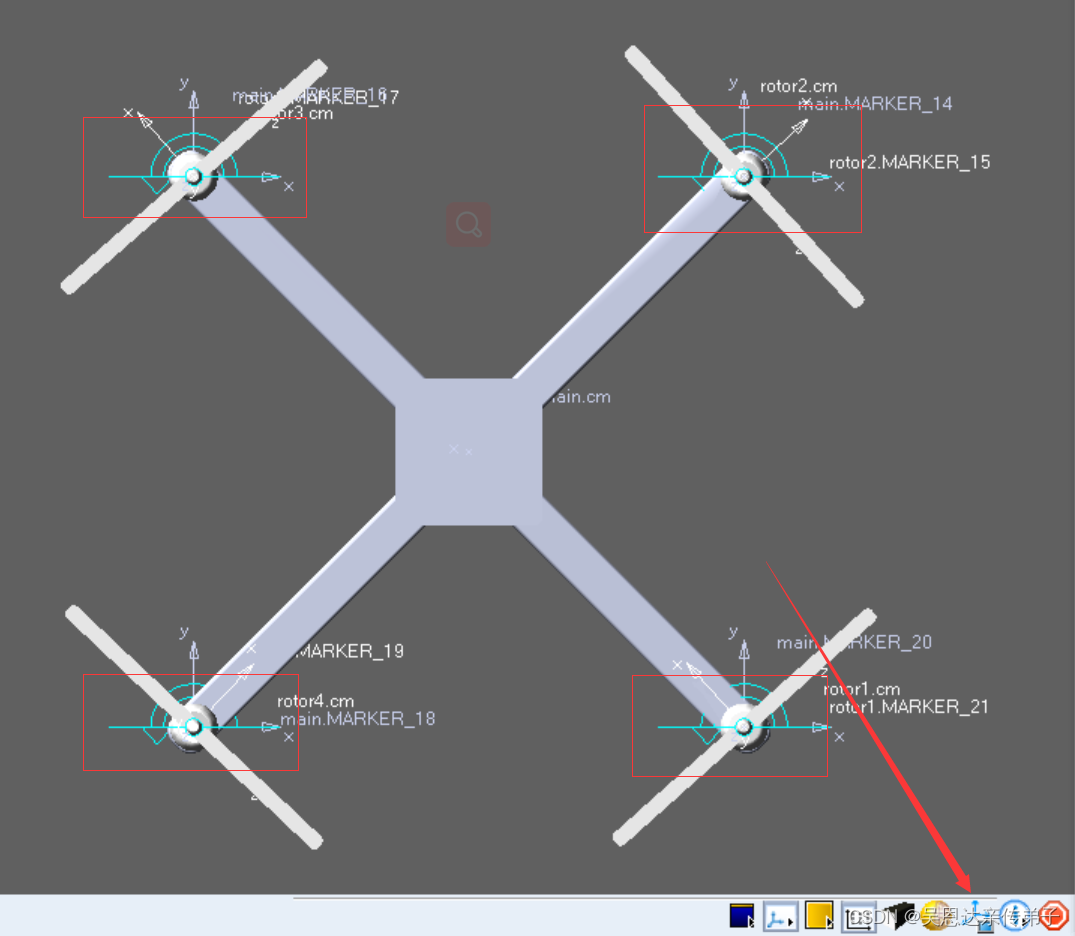
驱动与力矩是添加在连接上的
驱动添加旋转运动副如图,完成后双击将类型选项的位移改为为速度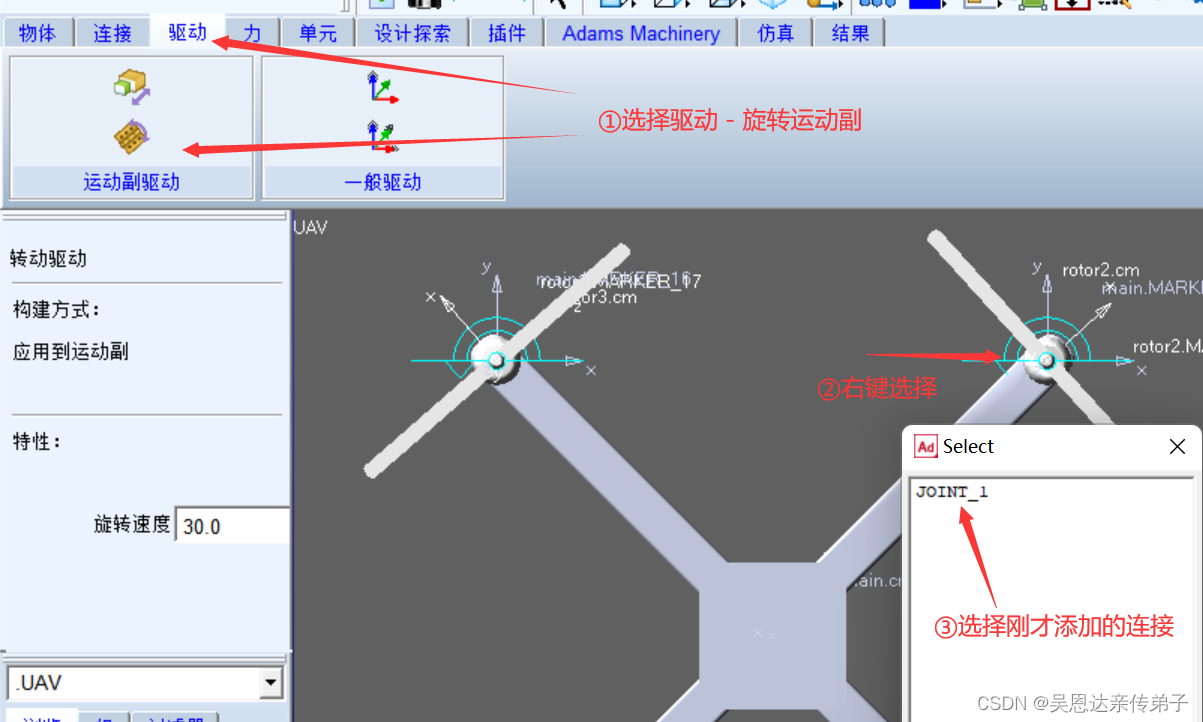
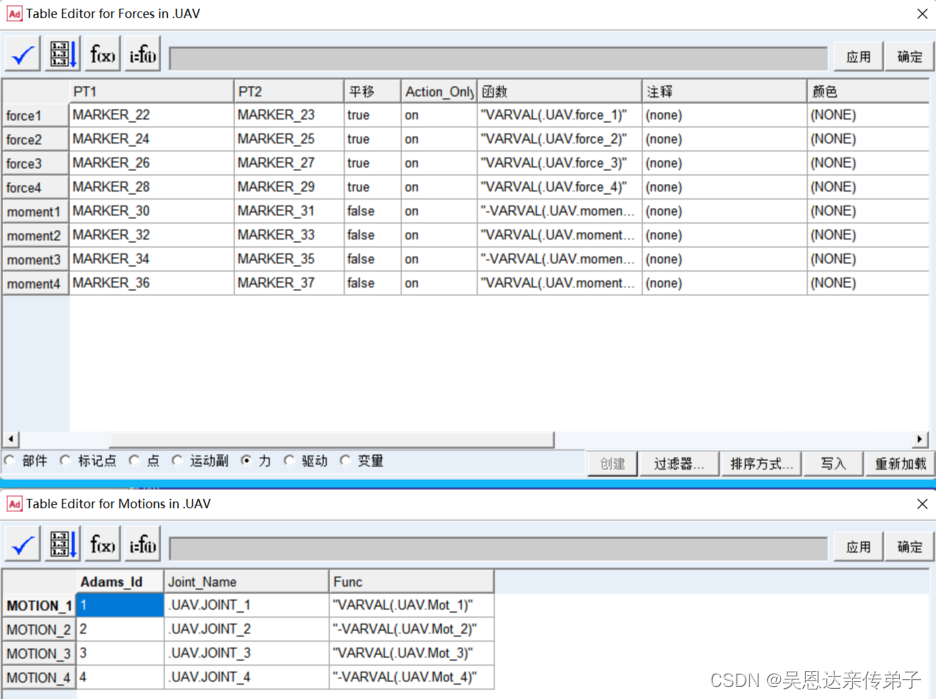
驱动的函数前添加负号。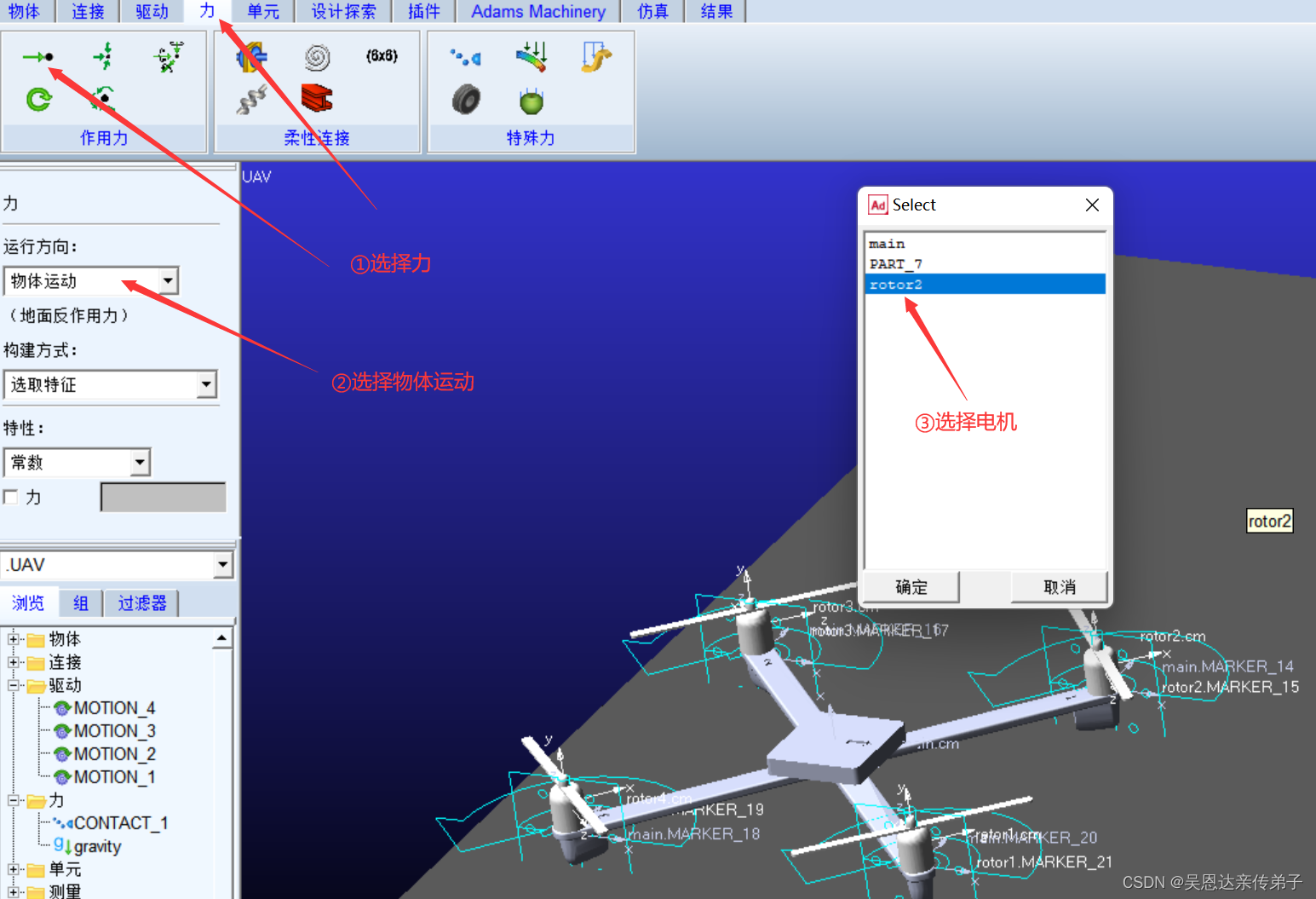

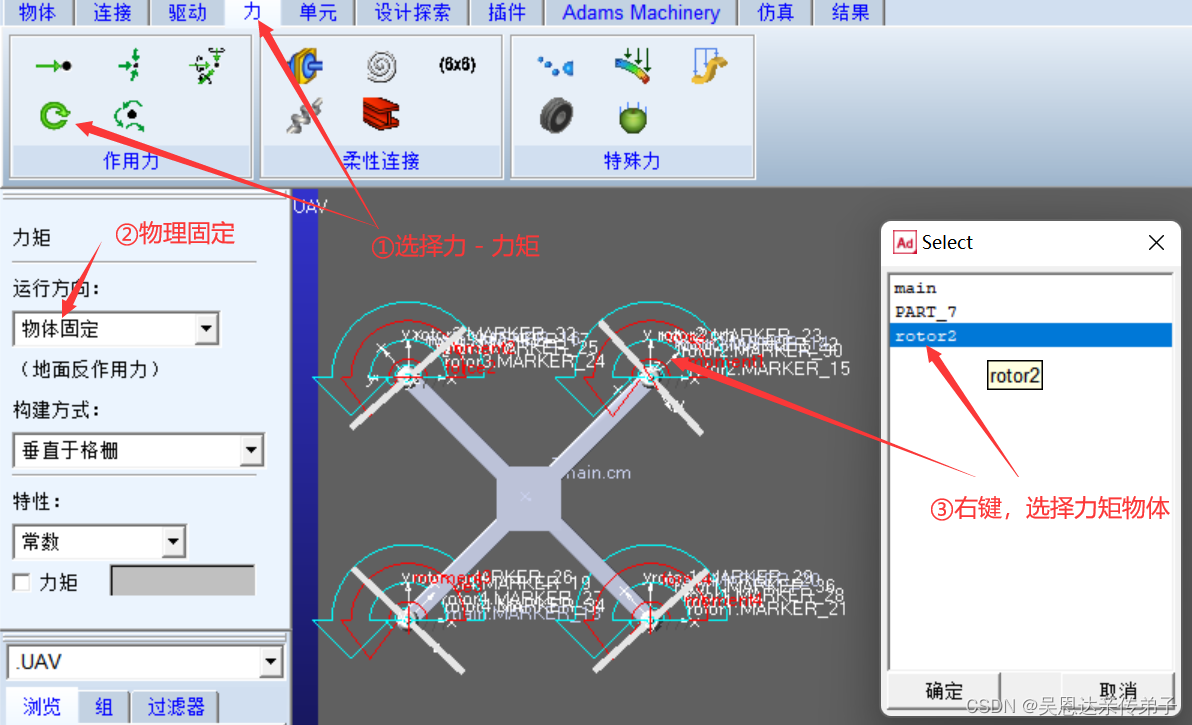
对应的函数前添加负号。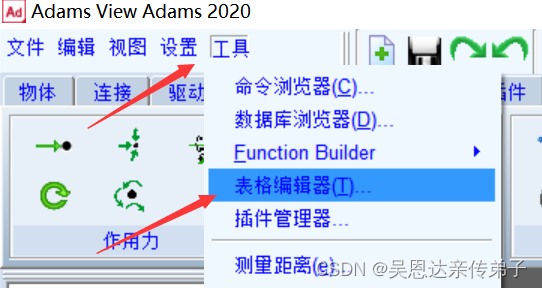 - 通过过滤器打开质量特性,选择用户定义并进行修改
- 通过过滤器打开质量特性,选择用户定义并进行修改 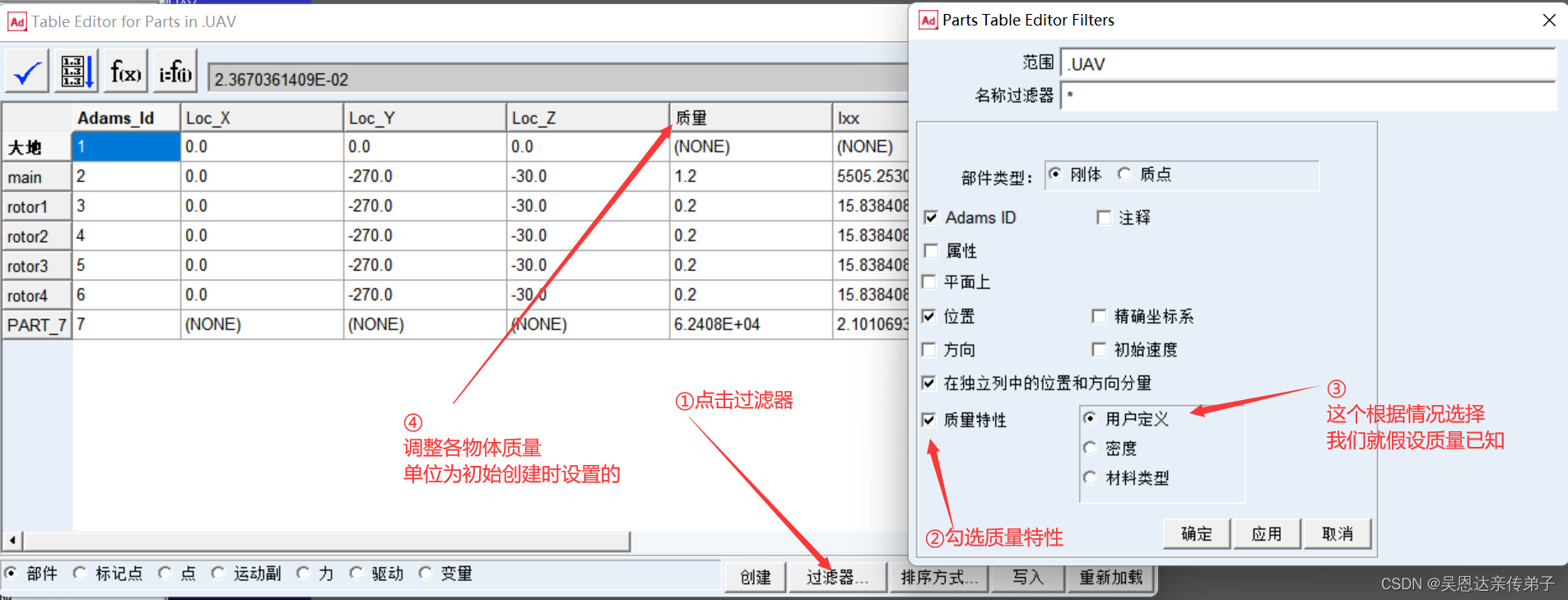
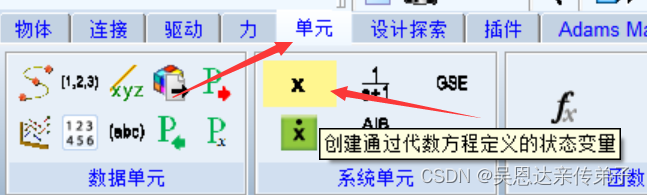
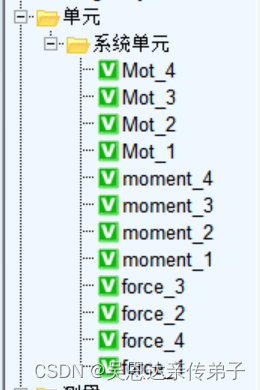
VARVAL()函数添加至对应驱动与力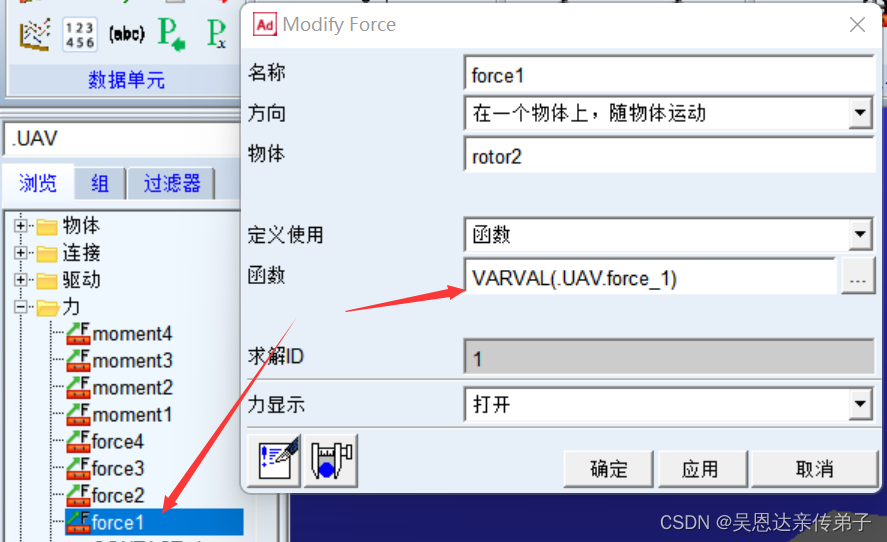
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















