















































软件

产品


1、在更改文件路径,最好新建一个文件夹twoDOFLink,所有工作文件放在同一个文件夹中,并新建BIN文件MODEL.bin。
2、选取连杆(物体),画出两连杆。如图

3、设置运动副(连接):选择旋转副,地面与杆1的一端相连,杆1的另一端与杆2的一端相连。
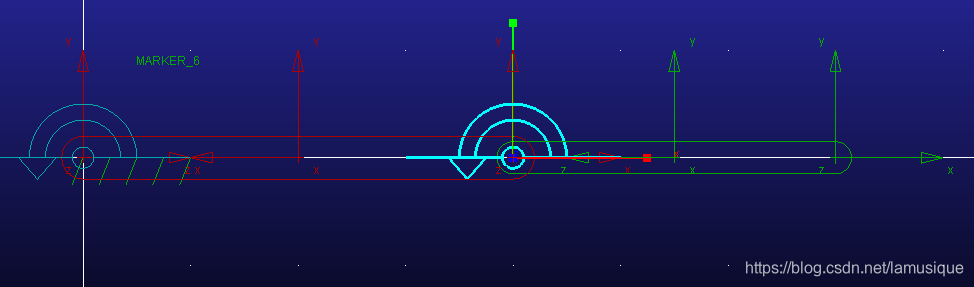
4、设置关节驱动(驱动):驱动关节应用到运动副。

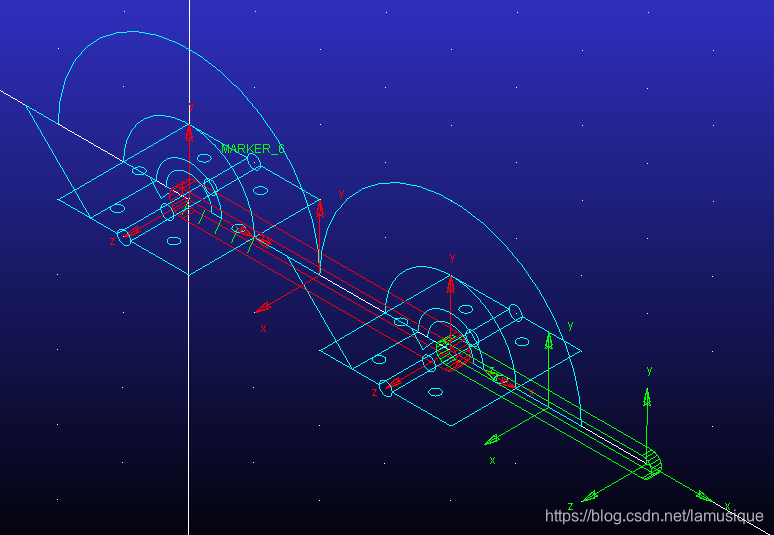
大家注意什么叫做质心坐标系(连杆中间质心),什么叫做局部坐标系(连杆两端(为了方便杆之间的坐标系变换))?至此简单的二连杆系统搭建完成。下面认识一下什么叫做ADAMS提供的测量。
5、设置测量输出
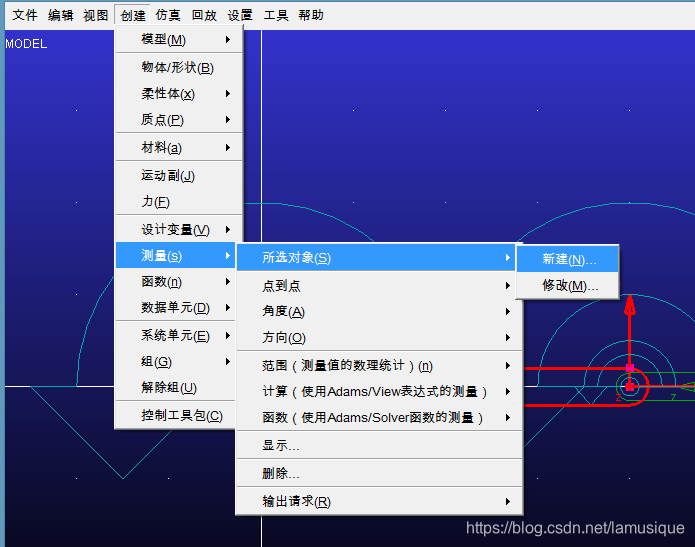
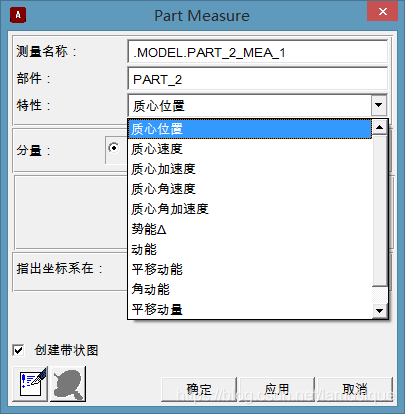
可以设置需关注的部位物理信息,如质心位置,则是基于世界笛卡尔坐标系的数据。
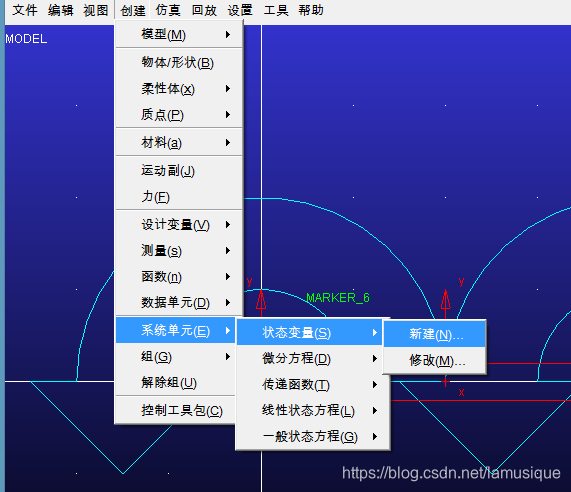
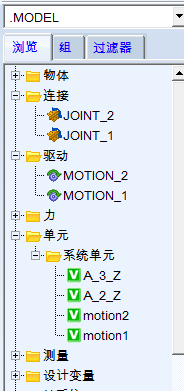
6、设置系统状态变量输出
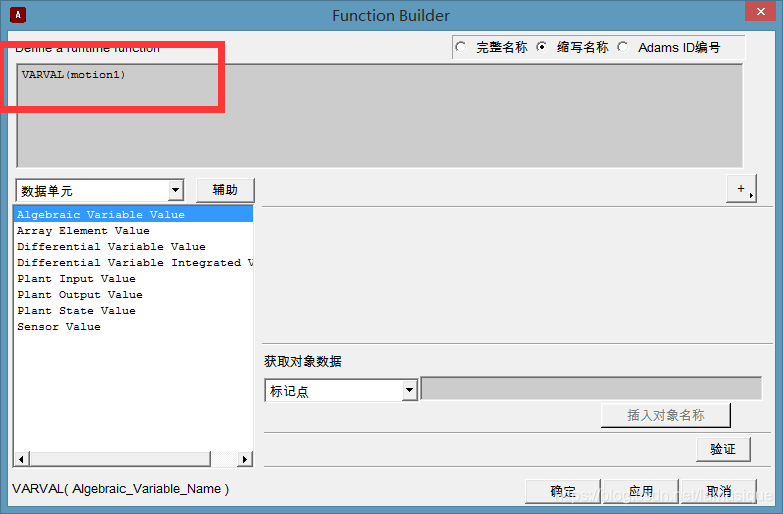
但是如果同simulink仿真,则需使用系统变量了。ADAMS程序与控制程序之间是通过相互传递状态变量进行信息交换,所以要将模型的输入输出变量及其输入输出函数用一组状态变量来表示。
将需要的数据全部设置为系统状态变量,方便后面变量的推测,且看。
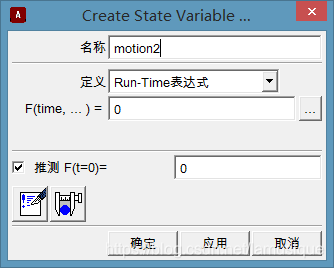
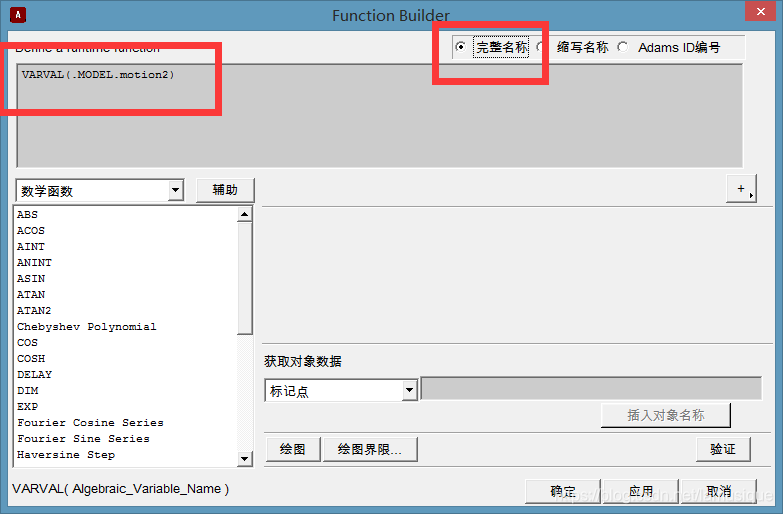
设置驱动力矩为系统状态变量,分别为motion1 motion2
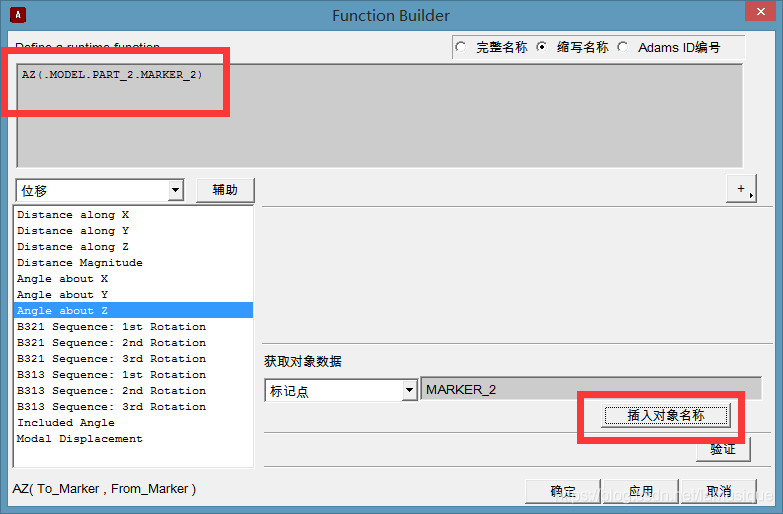
然后设置连杆的变化信息为系统变量,这里采用各个杆的转动角度为例。选择内部的自带检测函数。
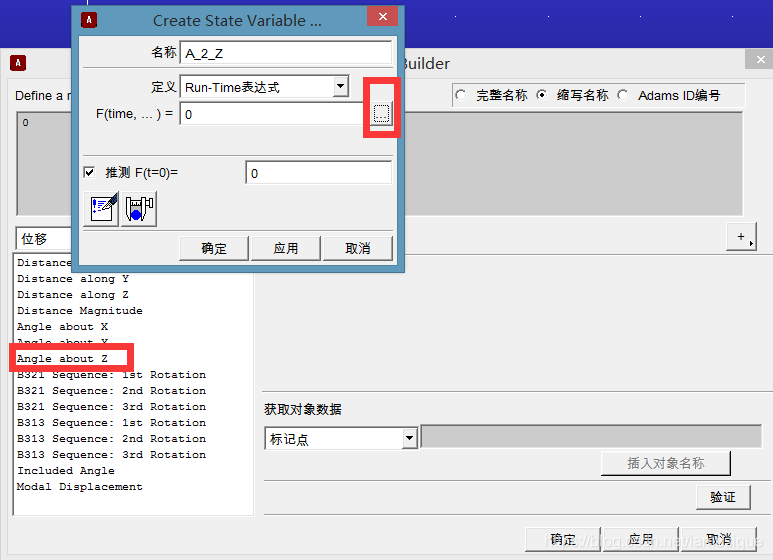
选择marker坐标系作为形参中的To marker,如果From marker缺省,则默认From marker为大地坐标系。
下面简单列举一些函数的使用:(*为X、Y、Z、M(幅值))
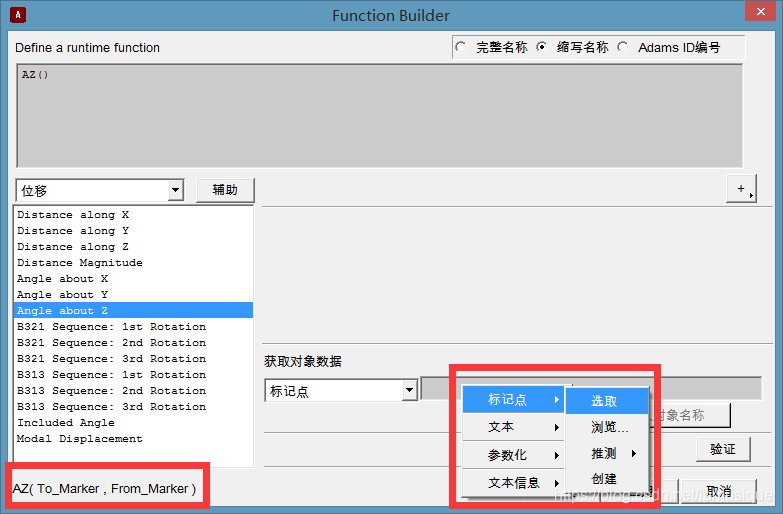
D*(To Marker,From Maker,Along Maker):填写两个坐标系,坐标系可通过函数框中的右下方,选取坐标点选取,然后在备选框中选取标识选取,填写好可点击函数验证,没有错误后点击确认就行了
同下面的函数,若你填写一个坐标,就将缺省量默认为大地的坐标系了。
2. A*(To Marker ,From Marker):坐标系To Marker相对于From Maker 的X(Y、Z)轴旋转角度(弧度)
3. YAW(To Maker,From Maker):也就是B321 Sequence,是T坐标系相对于F坐标系按照321旋转序列的第一个弧度角。(同PITCH、ROLL…)
4. V*(To Marker,From Maker, Along Maker,Reference Frame):坐标系To Maker相对于From Maker的速度矢量在坐标系Along Maker的X轴投影,计算方式是通过Reference Frame中进行微分计算的。
5. M*(To Marker,From Maker, About Maker):坐标系To Maker相对于From Maker坐标系的X轴角速度在Along Maker上的分量。
6. ACC*(To Marker,From Maker, Along Maker,Reference Frame):加速度
7. WDTX(To Marker,From Maker, Along Maker,Reference Frame):角加速度矢量
8. JOINT(Joint Name,On This Body,Froce Component,Along/About Axes):Joint Name运动副在Along Axes方向的约束力或力矩,On This Body 取0或者1表示是主(I Maker)还是从(J Maker)的约束力,Force Component 是力的方向,1和5为约束力的幅值,2~4和6~8为不同的角度
9. MOTION(Joint Name,On This Body,Froce Component,Along/About Axes):驱动的驱动力矩或者约束力
10. PTCV(Joint Name,On This Body,Froce Component,Along/About Axes):点-线副上的驱动力矩或者约束力
11. F*(To Marker,From Maker, Along Maker):坐标系To Maker相对于Along Maker的方向力分量,同样可以缺省
12. T(To Marker,From Maker, Along Maker):力矩
再给杆2设置系统状态变量。回过头来对把没有填写函数的motion1,motion2的状态变量填在旋转驱动的函数上,用于驱动旋转。同样在函数框选择设计变量,再选择推测就ok。
导入simulink的准备工作完成了。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















