















































软件

产品


1.在adams view中创建简单的模型(一个方块质量为10,在方块和地面之间加一个移动副,在滑块的质心处加一个大小为10N的力)
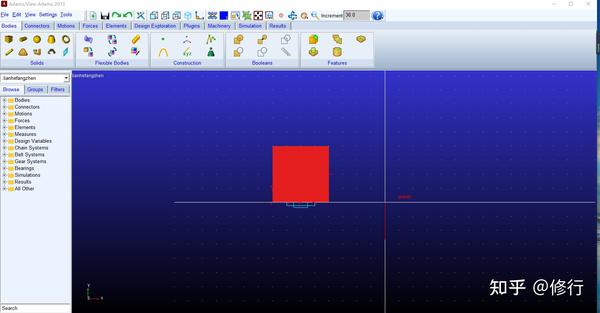
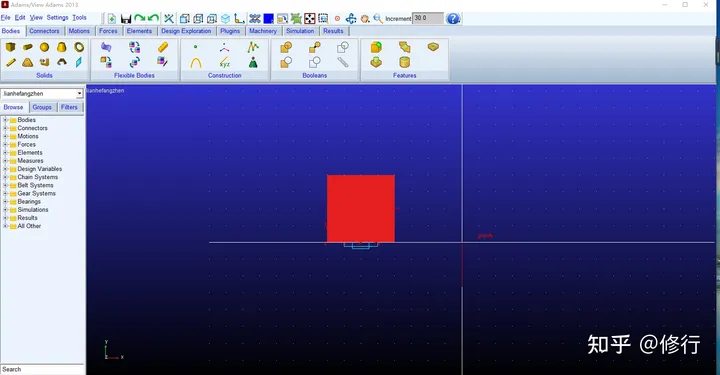
2.进行仿真
得到滑块的加速度为1m/s²。
3.建立控制系统接口
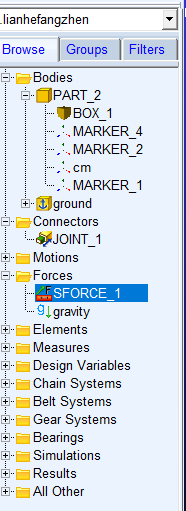
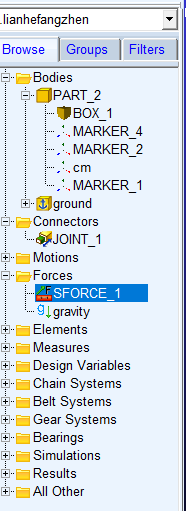
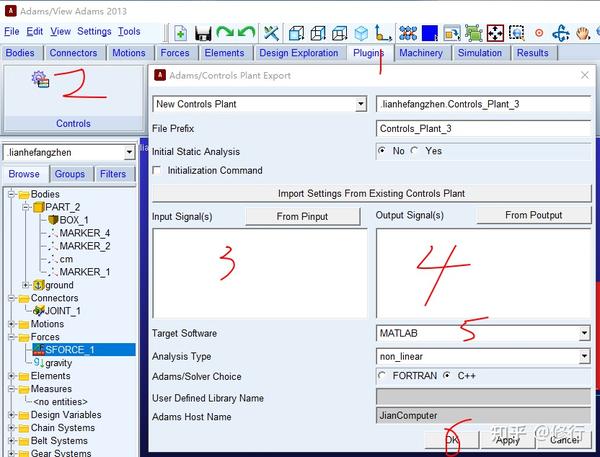
(1)确定系统的输入和输出,在本例中加在滑块质心上的力为输入,名称为Force_In; 滑块的加速度A为输出。在adams中设置过程如下图:
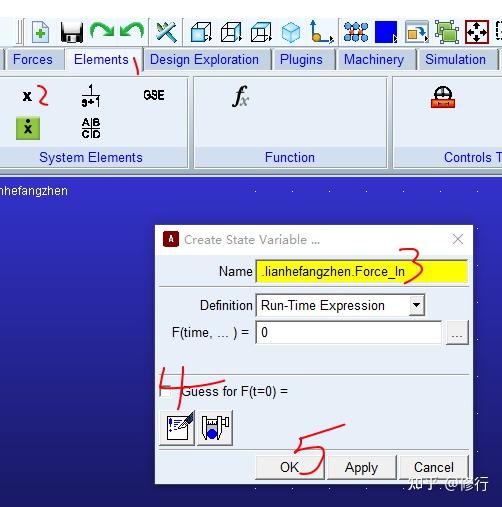
通过上图中的5个步骤,就可以将输入Force_In变为状态变量,注意上图中F(time)=0,表示的是这个变量的数据来自于matlab,和下图中输出状态变量不同。
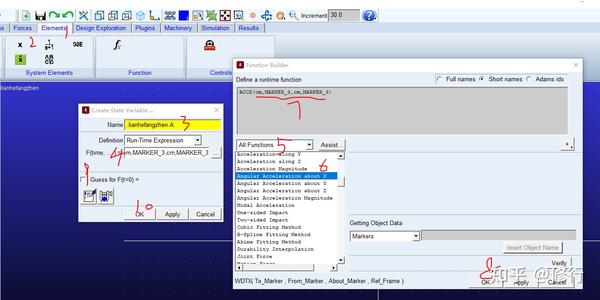
上图中第7步比较难,ACCX(cm,MARKER_3,cm,MARKER3),表示的是测量滑块在X方向的加速度,cm为滑块的质心名称,MARKER_3为地面上的一个点。
(2)创建输入输出
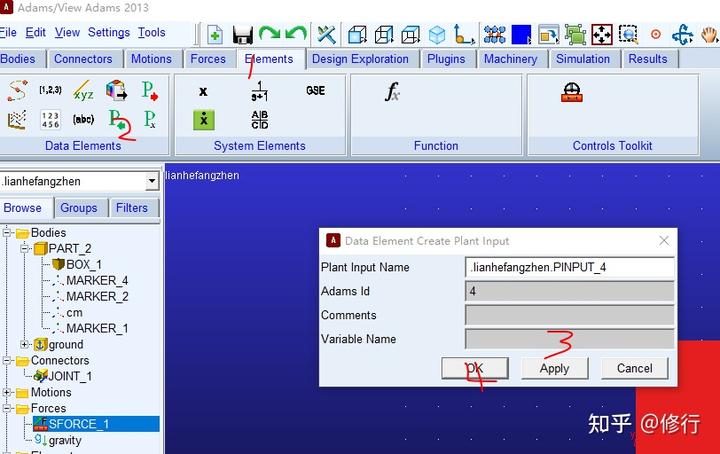
在上图第3步中右击,varibleClass-->Guesses-->Force_In 即可完成输入的创建,同理输出在第2步中点带红色箭头的P。
4.修改机械仿真模型
主要将一开始添加的大小为10N的力改为一个从simulink中实时得到的输入,利用VARVAL(Force_In)
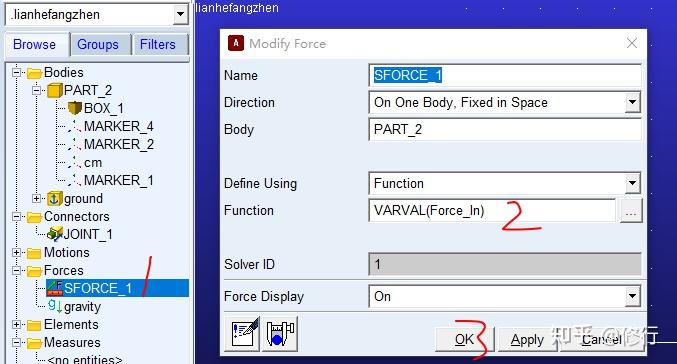
VARVAL()的作用为得到实时状态变量。
5.输出机械仿真模型
在步骤3 和4中要在空白处右击,通过Gussess的形式选择输入和输出,而不可以点上面的From Pinput 和From Poutput
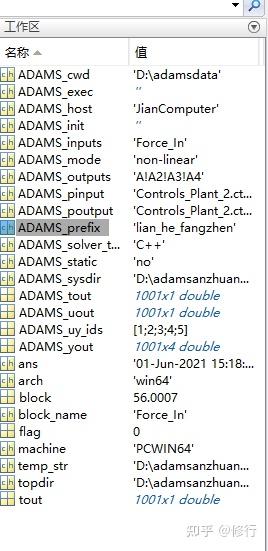
6.点击保存,并关闭ADAMS,这时再打开adams的工作目录,就可以看到新生成的4个文件,如下图:


其中aviewAS.cmd文件出现在工作目录中后,当再次打开adams时,就不再出现打开adams时的提示界面,只有删除才能出现。
7.adams和simulink 联合仿真
(1)在matlab的命令窗口中输入步骤5中的名称,运行:
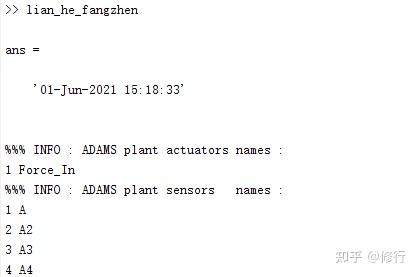
(2)在matlab命令窗口中输入adams_sys执行,得到:

以上三个模块是系统的3种不同表示形式,一般把两个红色的模块删除,留黄色的模块进行仿真
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















