















































软件

产品


1. 什么是运动副?
定义:机构由若干个相互连接接起来的构件组成。机构中两构件之间直接接触并能作相对运动的可动连接,称为运动副。
零件之间的连接分为两类:固定联接、可动联接。
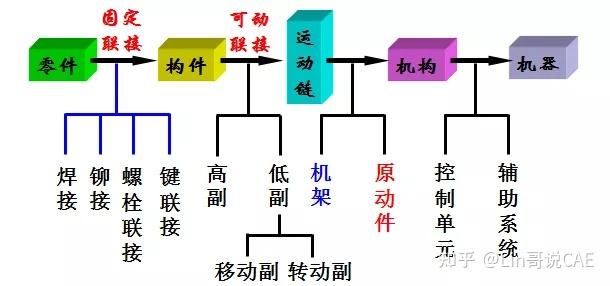
固定联接形式多样,如:点焊、焊缝、铆接、螺栓、粘胶等。
可动联接分为高副和低副。 这两者的区分就是零件之间接触方式,两构件通过点或线接触构成的运动副称为高副;两构件通过面接触构成的运动副称为低副。
今天本文要深入讲解的是abaqus软件里的低副,并且主要讲解常见的移动副和转动副;以及如何在hypermesh软件创建运动副的方法归纳总结。
在 Abaqus/ Standard 中, 可以在梁的一个或者两个端部上释放一个局部转动自 由度或者一个局部转动自由度的组合 。
单元端部释放用来模拟单元的一个端或者两个端部处的铰链连接 ( 在一个、 两个或者 三个正交方向上的铰链) 。 通过释放转动自由度, 允许单元的一端相对于节点, 关于所选的 自由度自由转动。 与节点共用没有释放的转动自由度。 用户必须注意, 不要为共用一个节点 的所有单元释放该节点处的一个指定自由度, 否则, 该节点将失去此自由度的刚度, 并且 Abaqus/ Standard 将发出零支点警告信息。 单元端部释放在单元局部自由度上操作。
受释 放影响的转动自由度是空间中梁关于局部 n1轴的转动、 关于局部 n2轴的转动和关于 t 轴的转 动。 对于平面中的梁, 只有关于局部 n1 轴的转动是有效的 ( 它与关于整体 - z 轴的旋转相 重合) 。
可以使用连接器单元为机构类型的分析施加基于单元的运动约束。且这也是abaqus软件比较推荐的方法。其具体创建方法见下一小节。
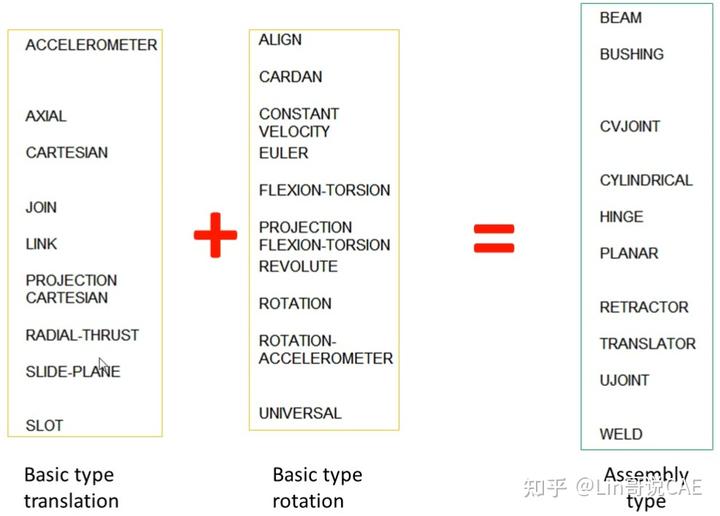
Abaqus求解器中连接器分类
【知识点1】:
对于习惯直接编辑inp文件修改连接器的小伙伴们,关键词如下:
*ELEMENT,TYPE=CONN3D2,ELSET=Name
EID, Node1, Node2
*CONNECTOR SECTION,ELSET=Name
basic type, basic type
Orientation1, Orientation2
Abaqus特别为转动副开发了一类特殊的连接器单元,叫铰链(hinge),也是abaqus特有的一种方法。在nastran、ansys、lsdyna这几个求解器中的转动副是revolute。对于使用abaqus的小伙伴们,小编推荐使用hinge铰链用于旋转运动。
【知识点2】
使用hinge铰链时,有几个需要注意的事项:
Hinge的使用场景
只要是旋转运动,都可以使用hinge来连接,如下图:

看到这里的小伙伴们,可能已经摩拳擦掌,想知道在hypermesh中如何创建上述两类运动副。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















