















































软件

产品


CATIA 三维设计软件在汽车白车身焊接生产中的应用越来越广泛,简单的焊接夹具一般不需要受力分析,设计时强度系数都会放大一些,所以强度基本都能满足使用要求。而机器人抓手由于要考虑机器人负载等因素,设计过程中不能把强度系数放的太大,此时设计过程中的应力分析就比较重要了。同时要满足抓手的刚性,因此要对所设计的抓手进行受力分析,控制在合理使用范围内。
在做分析前,我们要先将设计数据进行处理后再进行有限元分析,以下是操作方法步骤:
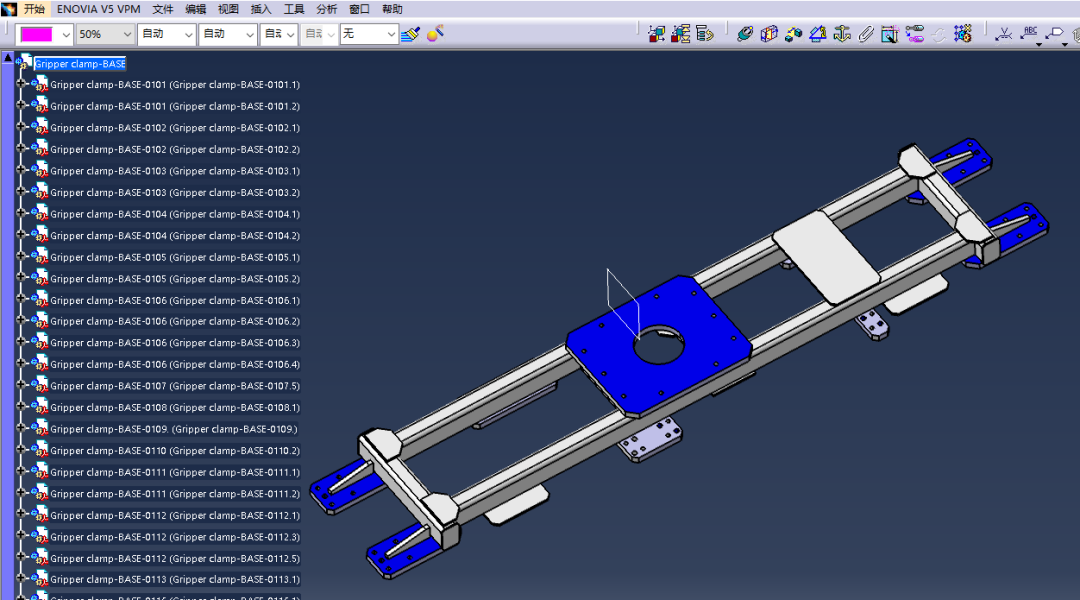
Step1:打开夹具抓手Base板,目录树内有多个Part零件组成,要转换成单个Part才可以进行受力分析。
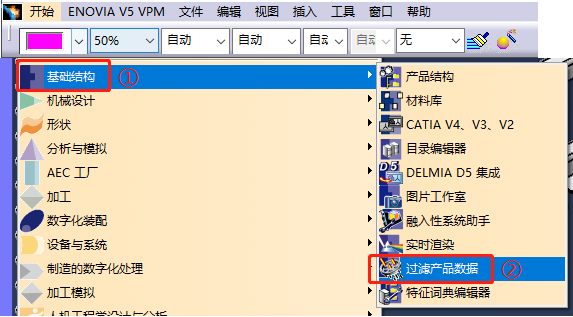
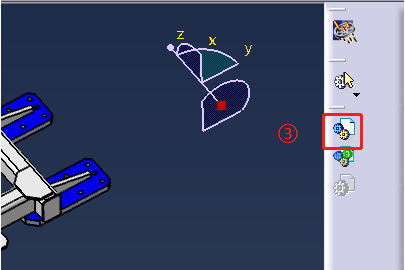
Step2:双击Product结构树激活,再点击【开始】菜单,选择【基础结构】下的【过滤产品数据】,再选择右侧工具栏的【产品至零件】。
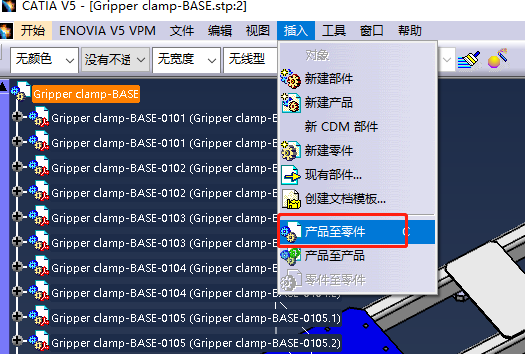
或者在状态栏【插入】菜单中,直接选择【产品至零件】。
点击确定。
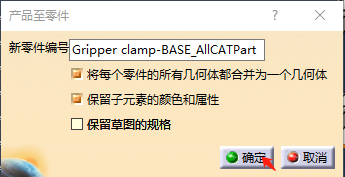
此时Part会全部转化为几何体,但仍不能受力分析
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
 技术文档
技术文档
 热门文章
热门文章






 155-2731-8020
155-2731-8020




















