













































产品
 著作权
著作权

用Delmia打开上一节完成的仿真项目,将软件首先切换到装置任务定义模块,这一节主要进行机器人弧焊相关的一些操作,基本操作顺序为定义焊接速度、添加外部轴、创建机器人程序、创建弧焊焊点、添加过度点,最后优化焊接路径,主要用到装置任务定义模块和弧焊编程模块,具体操作如下:
1、新建机器人速度:在设备控制器工具条中点击第二个命令,然后选择机器人弹出运动轮廓对话框,按下图所示分别新建MOVL速度为10mm/s,MOVJ速度为80%,完成后如下图所示;

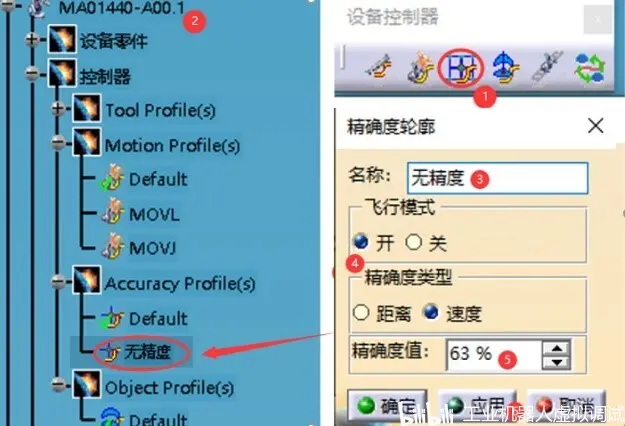
2、新建运动精度:在设备控制器工具条中点击第三个命令,然后选择机器人弹出运动轮廓对话框,按下图所示新建精度等级,完成后如下图所示;
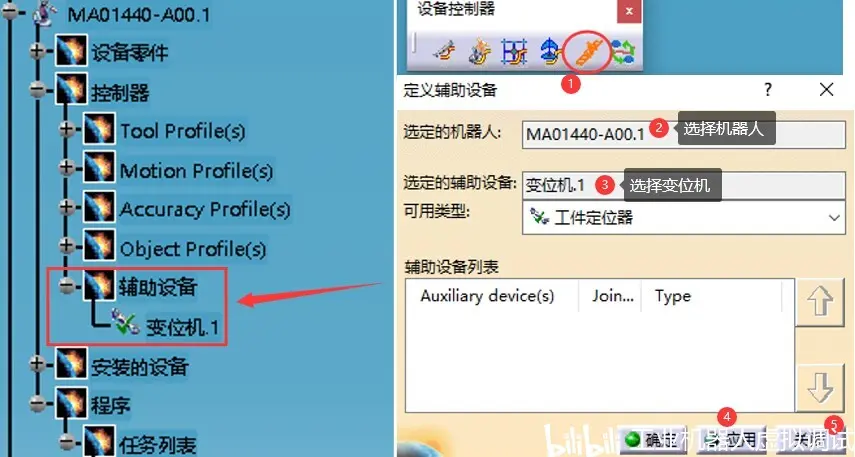
3、 添加外部轴:点击设备控制器工具条中的定义辅助设备命令,弹出对话框选择机器人1和变位机,将变位机作为机器人1的外部轴,如下图所示外部轴添加完成后机器人控制器下面会出现辅助设备节点;
4、创建机器人程序:在顺序工具条中点击第一个命令New Task,然后选择机器人创建机器人焊接任务,并重新命名,如下图所示在机器人下面出现程序节点;

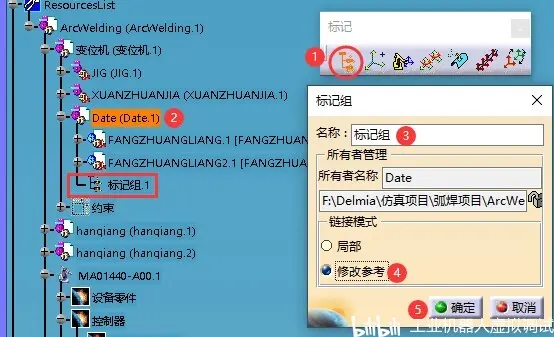
5、新建标记组:在标记工具条中点击第一个命令,然后选择产品Date弹出标记组对话框,链接模式选择修改参考,点击确定按钮后在产品Date下面将新建一个标记组。若链接模式选择局部则标记组将被创建在总资源节点ResourcesList下面;
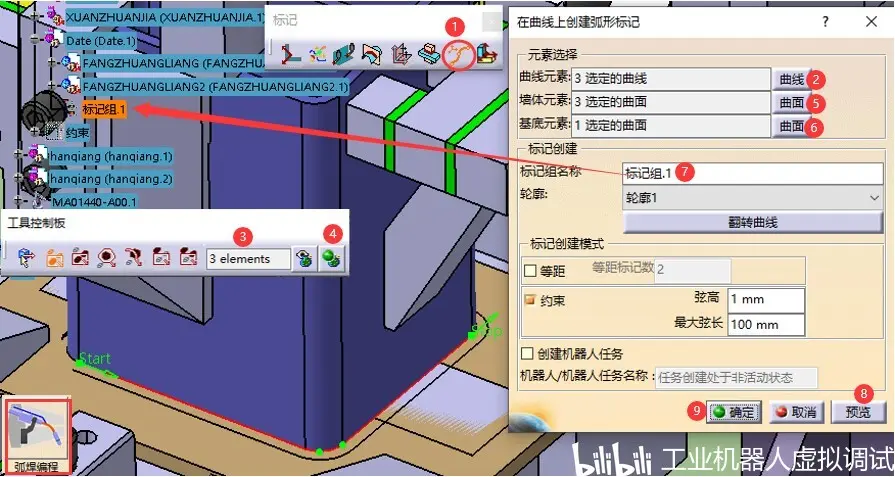
6、创建弧焊焊点:将软件切换到弧焊编程模块,产品展示修改为设计模式。点击标记工具条中倒数第二个命令,弹出创建弧形标记对话框,首先分别定义曲线和曲面,点击曲线或者曲面后会弹出工具控制板对话框,按住Ctrl键进行多选,完成后会出现图中所示的开始和结束绿色箭头(即焊道的起始点和结束点),按住鼠标拖动箭头可调整开始和结束位置。产品必须是catia格式的文件不能是cgr格式,否则无法进行此操作。
标记组选择之前创建在产品下面的标记组,这样变位机在转动时焊道会随着产品一起转动。标记传教模式有两种形式,可依据实际情况自行设定。最后创建机器人任务选项可选可不选,完成后点击确定按钮;
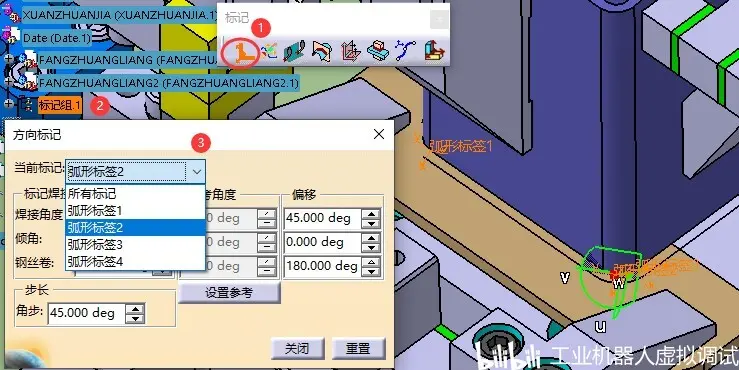
7、方向调整:点击标记工具条中第一个命令,然后选择标记组弹出“方向标记”对话框,可以整个标记组同时进行方向调整,也可单个标记进行,如下图所示依据焊枪工具坐标的方向和焊接姿态进行调整,完成后关闭对话框;
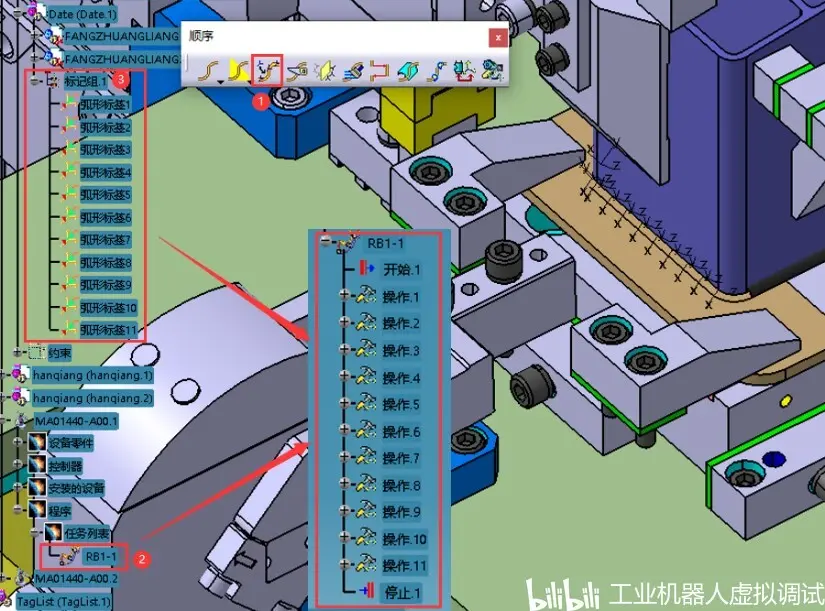
8、添加焊点到机器人任务:将软件切换到装置任务定义模块,在顺序工具条中选择增加标记命令,然后依次点击机器人程序RB1-1和前面创建的弧焊标记组,完成后所有的弧焊标记都会被添加到机器人程序中,如下图所示;
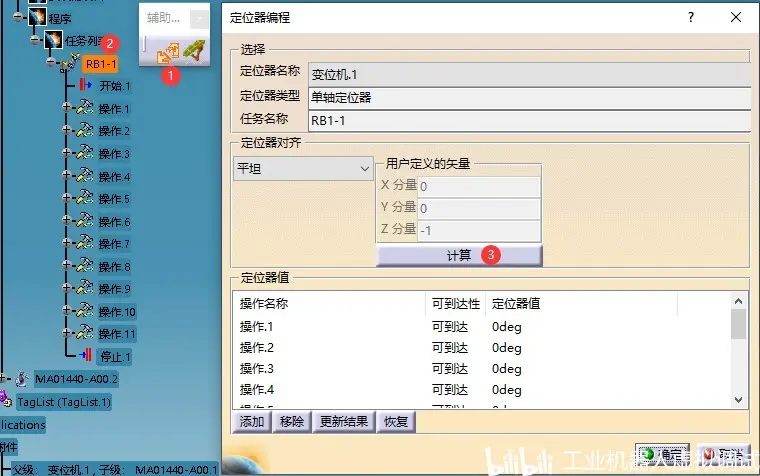
9、外部轴协调:将软件切换到弧焊编程模块,在工具条中选择机器人定位器编程命令,然后选择机器人程序RB1-1弹出定位器编程对话框,点击计算按钮后软件自动计算并设置合适的外部轴数值,需要用到外部轴协调功能时可以使用此命令进行外部轴数值的自动计算设置,从而实现外部轴转动的同时机器人进行焊接;
10、示教:以上步骤完成后将软件切换到装置任务定义模块,打开调试面板添加过度点,完成后定义焊点的动作类型、精度等参数,如下图所示;
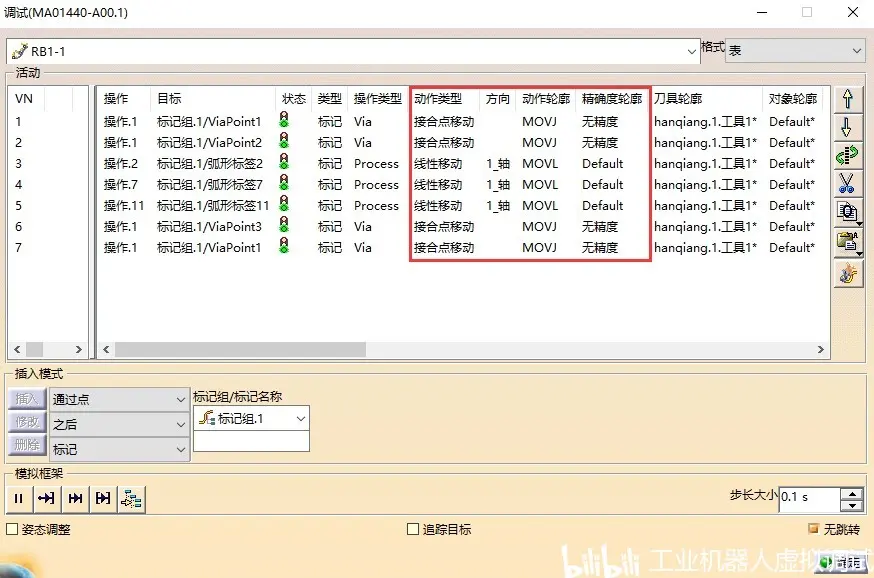
以上就是Delmia中机器人弧焊任务的示教过程步骤。
 技术文档
技术文档
 热门文章
热门文章


 155-2731-8020
155-2731-8020

























