















































软件

产品


ABAQUS在进行仿真的时候,会使用到一些边界条件,这些边界条件中使用最多的是XYZ三个方向上的平动约束,使用平动位移约束第一个需要注意的是位移的数值与正负情况,再者就是显示求解器与隐式求解器对位移结果的影响。
有时候我们还需要实现部件的转动,那就要使用到XYZ的转动自由度约束。但是如果是一个物体多方向转动或者是多个物体转动,设置不当往往会出现胡乱转动的情况,尤其是公转和自转的混乱。
下边使用三个实例来演示一下不同耦合点和边界条件下公转和自转的区别。
首先绘制两个长方体,如图1所示,并设置三个参考点RP1、RP2与RP3,三个参考点的位置分别在左侧长方体的左端中心位置、原点位置、左侧立方体的重心位置。
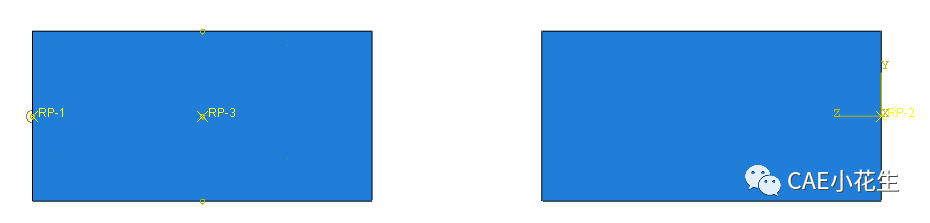
图1
第一种情况:如图2所示,耦合左边长方体至RP1,并设置约束住XYZ三个方向的平动自由度,设置约束住YZ方向的转动自由度,设置绕X轴转动-0.533rad。
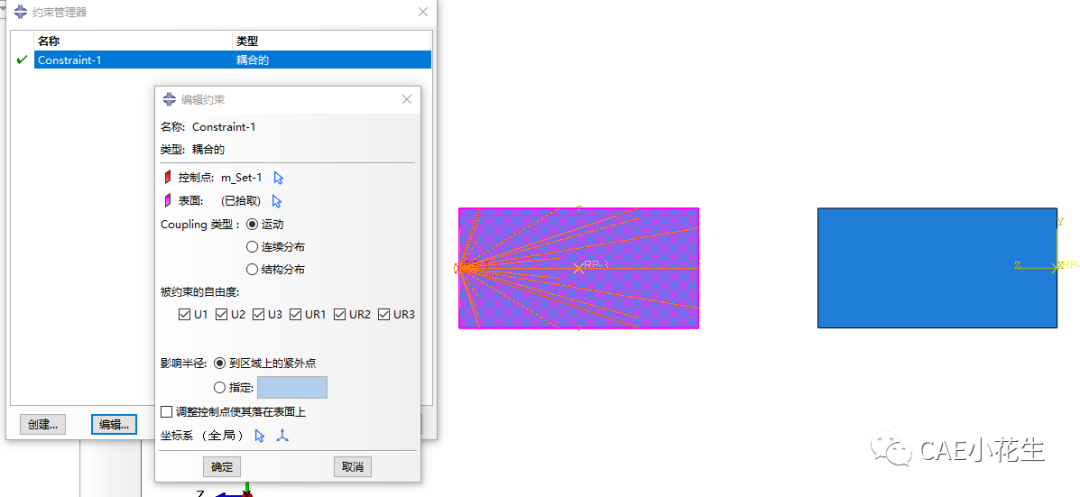
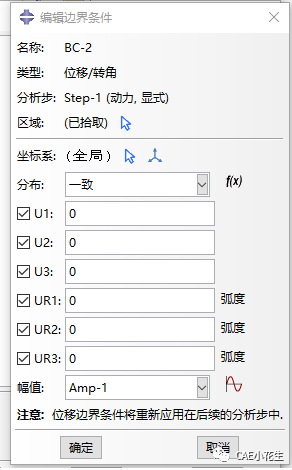
图2耦合设置与边界条件
GIF
图3 第一种结果
结果显示左边长方体沿着参考点RP1做顺时针旋转,体现为自转。
第二种情况:如图3所示,耦合左边长方体至RP2,并设置约束住XYZ三个方向的平动自由度,设置约束住YZ方向的转动自由度,设置绕X轴转动-0.533rad。
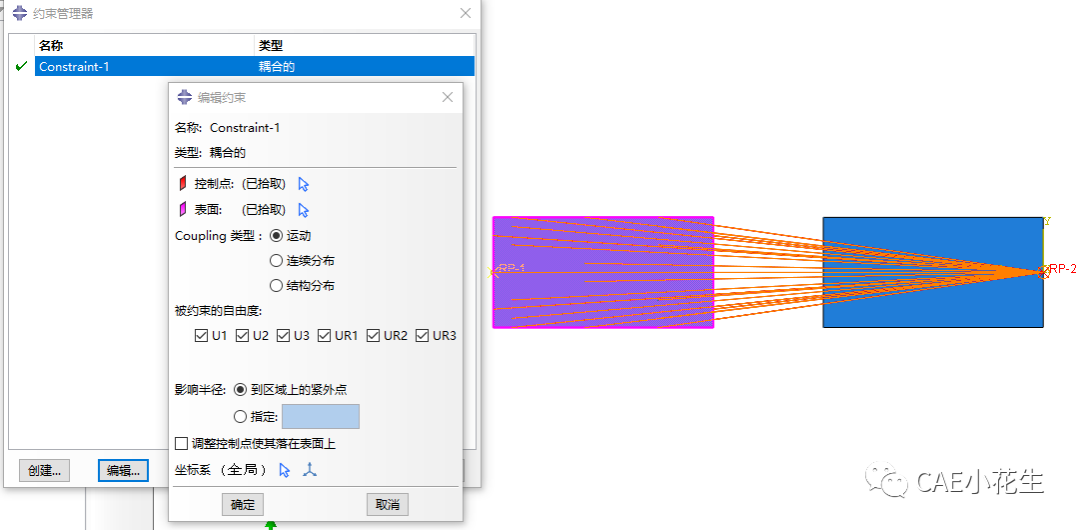
图4
GIF
图5
结果显示左边立方体沿着参考点RP2做顺时针旋转,体现为绕右侧长方体公转。
第三种情况:如图4所示,耦合左边长方体至RP3,并设置约束住XYZ三个方向的平动自由度,设置约束住YZ方向的转动自由度,设置绕X轴转动-0.533rad。
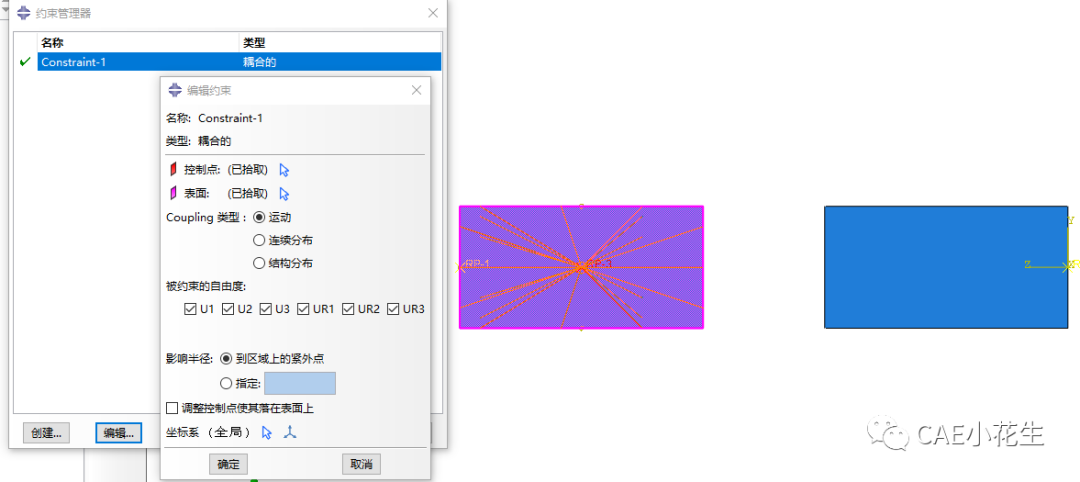
图6
GIF
图7
结果显示左边立方体沿着参考点RP3做顺时针旋转,体现为绕中心自转。
综合以上三个例子,我们得出结论,设置绕X轴旋转后,长方体实际的转动轨迹为绕参考点旋转,并不是绕着坐标系原点旋转。所以在设置边界条件的时候一定要特别注意参考点的位置,尤其是复杂模型。如果想要的旋转点位置与原点位置靠的很近,非常难发现问题出在什么地方。
下面还提供了两种不同自由度约束的情况。图8显示了放开Y轴平动约束的结果;图9显示了放开Z轴平动约束的结果。可以观察到放开约束后与上面第二种情况的结果差别很大,在一些特别的模型中,为了防止过度拉伸,必须释放一些约束,如何选择,大家可以自己尝试。至于其他约束放开的组合情况,就不在一一举例呈现了。
GIF
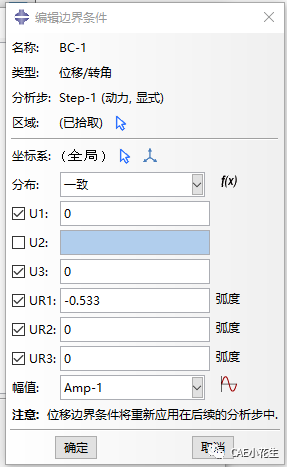
图8
GIF
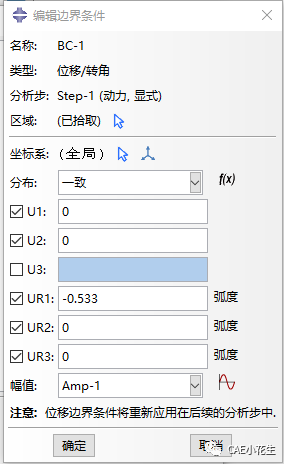
图9
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















