















































软件

产品


主要记录下自己在Jetson Xavier NX上运行ROS、Cartographer、基于D435i的Yolov5+TensorRT的系统环境配置流程,经过了无数次在ARM上的安装,这次是最流畅的一次环境配置,很丝滑。感谢各位大佬们的帮助!!!
(采用的是官方的Xavier NX)
**
**
官方 下载 :https://developer.nvidia.com/embedded/downloads
下载完后按照官网刷镜像就ok
https://developer.nvidia.com/embedded/learn/get-started-jetson-xavier-nx-devkit#prepare
jetpack4系列默认ubuntu18.04
试了几次更换国内源,但是出现upgrade后重启进不去系统,Jetpack4.6没问题,因此本文省略换国内源。
1、直接更新:
sudo apt-get update
sudo apt-get upgrade
2、CUDA环境变量配置
sudo vim ~/.bashrc # 使用 Vim 编辑环境变量
在最后添加下面两行
export PATH=/usr/local/cuda/bin:$PATH
export LD_LIBRARY_PATH=/usr/local/cuda/lib64:$LD_LIBRARY_PATH
wq保存退出
source ~/.bashrc
安装pip3
sudo apt install python3-pip python3-dev
python3 -m pip install --upgrade pip #升级pip
安装 Jetson-stats 管理工具
sudo -H pip3 install jetson-stats
运行,输入命令,如果出现错误在安装一遍运行
sudo jtop
可通过按数字 1-6 来切换不同功能界面,按 q 离开。后续环境配置需要TensorRT7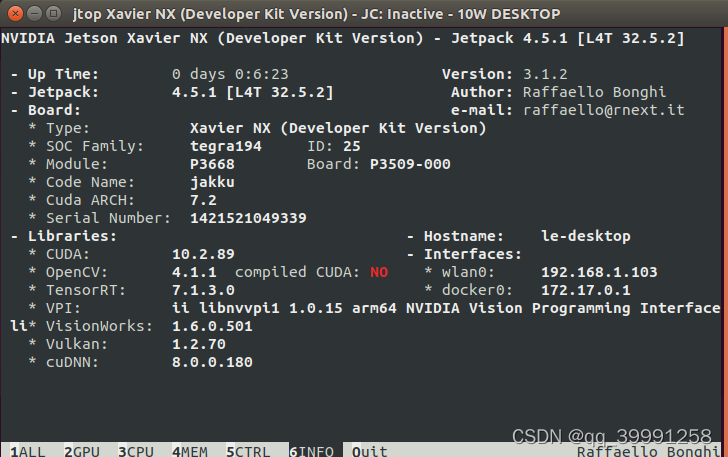
3、ibus输入法安装
sudo apt-get install ibus-pinyin
安完重启,配置
sudo ibus-setup
1、添加ROS软件源
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















