















































软件

产品


wing loss被CVPR2018收录, 是由萨里大学研究人员(第一至四作者)与江南大学研究人员(第五作者)共同研究。
给定一个图像 I I I和一个网络 Φ \Phi Φ,可以预测 人脸关键点 的vetor: s ‘ = Φ ( I ) s^`=\Phi(I) s‘=Φ(I).损失函数是:
其中 s s s是人脸关键点的ground-truth,函数 f ( x ) f(x) f(x)就等价于:
损失函数对 x x x的导数分别为:
d L 2 ( x ) d x = x \frac{dL_2(x)}{dx}=x dxdL2(x)=x
d L 1 ( x ) d x = { 1 i f x ≥ 0 − 1 o t h e r w i s e \frac{dL_1(x)}{dx}=
{1−1𝑖𝑓 𝑥≥0𝑜𝑡ℎ𝑒𝑟𝑤𝑖𝑠𝑒 { 1 i f x ≥ 0 − 1 o t h e r w i s e dxdL1(x)={1−1if x≥0otherwise
d s m o o t h L 1 ( x ) d x = { x i f ∣ x ∣ < 1 ± 1 o t h e r w i s e \frac{d\ smooth_{L1}(x)}{dx}= {𝑥±1𝑖𝑓 |𝑥| <1𝑜𝑡ℎ𝑒𝑟𝑤𝑖𝑠𝑒 { x i f | x | < 1 ± 1 o t h e r w i s e \begin{cases} x & if \ |x|\ <1 \\ \pm1 & otherwise \end{cases}dxd smoothL1(x)={x±1if ∣x∣ <1otherwise
L 2 L2 L2损失函数,当 x x x增大时 L 2 l o s s L2\ loss L2 loss对 x x x的导数也增大,这就导致训练初期,预测值与ground-truth差异过大时,损失函数对预测值的梯度十分大,导致训练不稳定。
L 1 l o s s L1\ loss L1 loss的导数为常数,在训练后期,预测值与ground-truth差异很小时, 损失对预测值的导数的绝对值仍然为1,此时学习率(learning rate)如果不变,损失函数将在稳定值附近波动,难以继续收敛达到更高精度。
s m o o t h L 1 smooth_{L1} smoothL1损失函数, 在 x x x 较小时,对 x x x的梯度也会变小,而在 x x x很大时,对 x x x的梯度的绝对值达到上限 1,也不会太大以至于破坏网络参数。 s m o o t h L 1 smooth_{L1} smoothL1完美地避开了 L 1 L_1 L1和 L 2 L_2 L2损失的缺陷。此外,根据fast rcnn的说法,"… L1 loss that is less sensitive to outliers than the L2 loss used in R-CNN and SPPnet." 也就是 s m o o t h L 1 smooth_{L1} smoothL1让loss对于离群点更加鲁棒,即相比于 L 2 L_2 L2损失函数,其对离群点、异常值(outlier)不敏感,梯度变化相对更小,训练时不容易跑飞。
图3描绘了这些损失函数的曲线图。需要注意的是, S m o o l t h L 1 Smoolth_{L1} SmoolthL1损失是Huber损失的一种特殊情况,L2损失函数在人脸关键点检测中被广泛应用,然而,L2损失对异常值很敏感。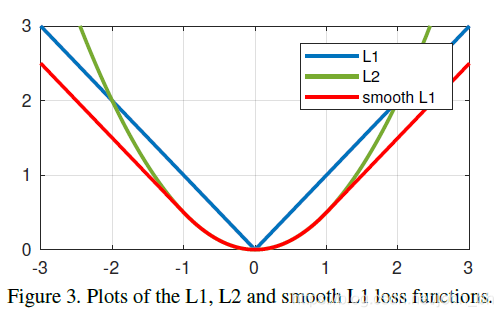
作者选了三个模型作为比较的baseline:
使用三种不同的损失函数对CNN-6网络进行AFLW-full训练,结果如表1所示。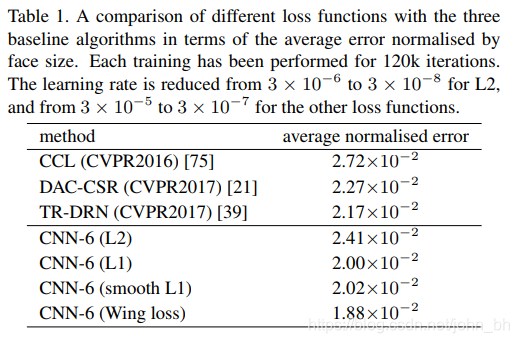
L 2 L2 L2损失函数结果在准确性方面比CCL好,但比DAC-CSR和TR-DRN差。 令人惊讶的是, L 1 L1 L1或 S m o o l t h L 1 Smoolth_{L1} SmoolthL1进行CNN-6训练时,尽管CNN网络很简单,但在准确性方面的性能却显着提高,并且优于所有最新的baseline方法。
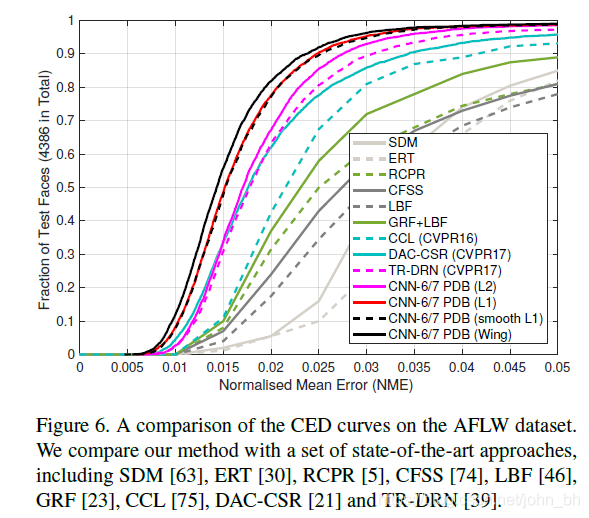
在图4中通过绘制累积误差分布(CED,Cumulative Error Distribution)曲线,比较使用的简单CNN-6网络在AFLW数据集上获得的结果。可以看到,上一部分中分析的所有损失函数在出现较大误差时表现良好。 这说明神经网络的训练应更多地关注具有小或中误差的样本。 为了实现此目标,提出了一种新的损失函数,即基于CNN的面部标志定位的机翼损失。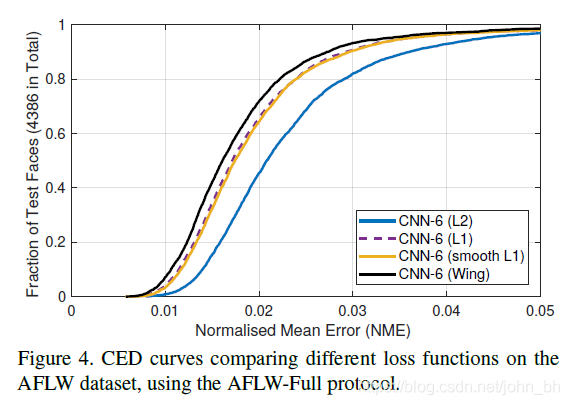
说明: 当NME在0.04的时候,测试数据比例已经接近1了,所以在0.04到0.05这一段,也就是所谓的large errros段,并没有分布更多的数据,说明各损失函数在large errors段都表现很好。模型表现不一致的地方就在于small errors和medium errors段,例如,你在NME为0.02的地方画一根竖线,一目了然。基于此,作者提出训练过程中应该更多关注samll or medium range errros样本。
直接分析公式3( L 1 和 L 2 L_1 和L_2 L1和L2),这两个函数的梯度大小分别为1和 ∣ x ∣ |x| ∣x∣,对应的优化步长大小为 ∣ x ∣ |x| ∣x∣和1.但是,当我们尝试同时优化多个点的位置时,情况变得更加复杂。 在 L 1 L_1 L1的情况下,所有点的梯度大小都相同,但是优化步长受较大误差的影响(随误差增大而增加)。 对于 L 2 L_2 L2,优化步长是相同的,但梯度将由较大的误差决定。在这两种情况下,两个loss都受到大的误差的影响,对大误差敏感。 因此,在两种情况下都很难校正较小的偏移。
优化步长:优化步长指得是要达到最优化,需要迭代的次数(步数);L1的梯度是固定的,所以误差越大,采用L1优化就需要更多的迭代次数,也就是他说的“优化步长随着误差增大而增大”;反之,L2的梯度跟误差是成正比的。例如:你与目标距离有100公里,假设没次前进0.01(学习率);第一次L2梯度是100,你前进1000.01=1公里,第二次,还有99公里,梯度就是99,则一步前进990.01=0.99公里,以此类推;而L1的梯度固定是1,则每次前进1*0.01=0.01公里
可以使用 l n x ln\ x ln x来增强小误差的影响,它的梯度是 1 x \frac {1}{x} x1,对于接近0 的值就会越大,optimal step size为 x 2 x^2 x2,这样gradient就由small errors“主导”,step size由large errors“主导”。这样可以恢复不同大小误差之间的平衡。 但是,为了防止在可能的错误方向上进行较大的更新步骤,重要的是不要过度补偿较小的定位错误的影响。 这可以通过选择具有正偏移量的对数函数来实现。
但是这种类型的损失函数适用于处理相对较小的定位误差。 在wild 人脸关键点检测中,我们可能会处理极端姿势,这些姿势最初的定位误差可能非常大,在这种情况下,损失函数应促进从这些大错误中快速恢复。 这表明损失函数的行为应更像 L 1 L_1 L1或 L 2 L_2 L2。 由于 L 2 L_2 L2对异常值敏感,因此选择了 L 1 L_1 L1。
所以,对于小误差,它应该表现为具有偏移量的对数函数,而对于大误差,则应表现为L1。这样的复合损失函数可以定义为:
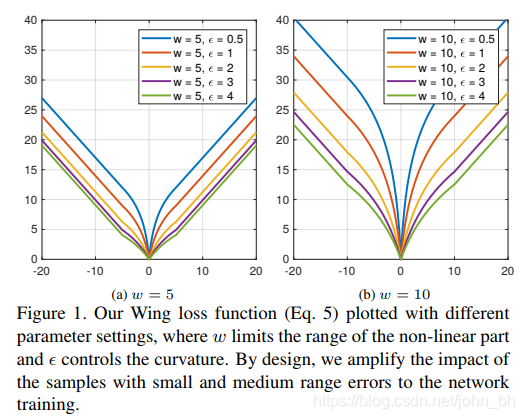
实际上,的Wing loss函数的非线性部分只是简单地采用 l n ( x ) ln(x) ln(x)在 [ ϵ / w , 1 + ϵ / w ] [\epsilon/ w,1 +\epsilon/ w] [ϵ/w,1+ϵ/w]之间的曲线,并沿 X X X轴和 Y Y Y轴将其缩放比例为 w w w。 另外,我们沿 Y Y Y轴应用平移以使wing(0)= 0,并在损失函数上施加连续性。
在实验中,将wing loss的参数设置为 w = 10 w = 10 w=10和 ϵ = 2 \epsilon=2 ϵ=2。有关不同参数设置的结果,请参阅表2。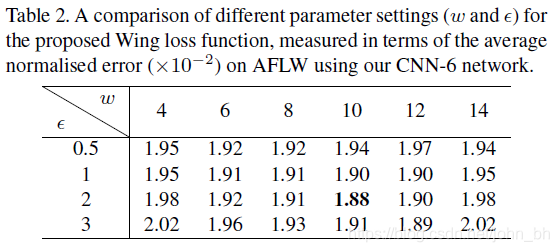
为了解决人脸姿势不平衡造成的模型性能不佳的问题,作者提出了基于人脸姿势的数据平衡策略PDB(Pose-based Data Balancing)。例如:在给定训练数据集的情况下,其中的大多数样本很可能是正脸数据。在这样的数据集上训练的神经网络主要是正面的。通过过度拟合正面姿势,它无法很好地适应具有较大姿势的脸部。
PDB方法:首先使用Procrustes Analysis将所有训练形状与参考形状对齐,并以平均形状作为参考形状。将对齐后的training shapes进行PCA,用shape eigenvector将original shapes进行投影至一维空间,用来控制姿态变化。训练样本的投影系数分布由带有K个bin的直方图表示,如图5所示: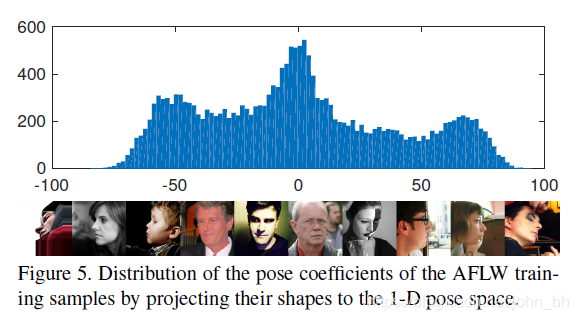
作者通过复制落入较低占用率的bin中的样本来平衡训练数据,主要方法有随机旋转,边界框扰动和其他数据增强方法来修改每个重复的样本,增加角度大人脸的数据。
除了out-of-plane head rotations外,人脸关键点检测的准确性还有其他因素,例如:in-plane head rotations,不准确的bounding box。为了解决这个问题,作者提出了两阶段人脸关键点检测的框架。如下图所示: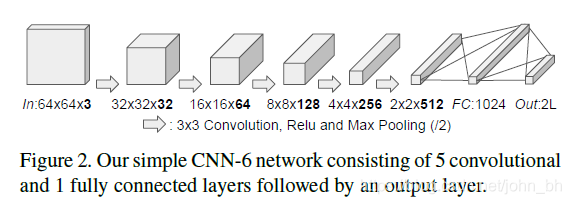
在提出的两阶段定位框架中, 64 × 64 × 3 64×64×3 64×64×3输入图像的CNN-6网络作为第一个网络。 CNN-6网络输出的人脸关键点可通过消除in-plane head rotation并校正边界框,给第二网络的提供更好的输入信息。
“ CNN-7”用于表示第二个网络, CNN-7与CNN-6具有类似的体系结构。不同之处:
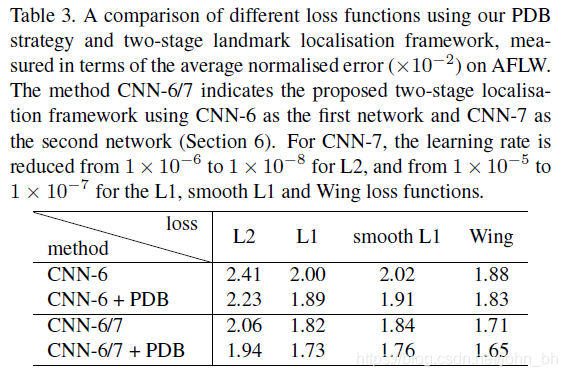
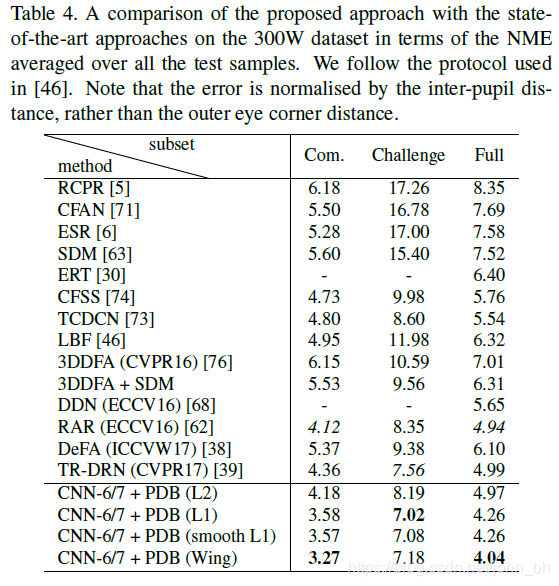
因此,将“ CNN-6 / 7”一词用于两阶段面部界标定位框架,并将其它模型比较如表3所示:应注意的是PDB可以改善CNF-6在AFLW数据集上针对所有不同类型的损失函数的性能。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















