















































软件

产品


dlib支持检测人脸特征关键点,官方提供了68维度和5维度的人脸关键店检测预训练模型提供下载使用。
本实例中,使用CNN人脸检测模型和68维人脸关键点检测模型
import dlib
import numpy as np
from cv2 import cv2
# step 1. create the face detector and shape predictor model
face_detector_model_path = '../models/mmod_human_face_detector.dat'
face_detector = dlib.cnn_face_detection_model_v1(face_detector_model_path) # dlib.cnn_face_detection_model_v1
shape_model_path = r'../models/shape_predictor_68_face_landmarks.dat'
face_shape_predictor = dlib.shape_predictor(shape_model_path) # dlib.shape_predictor
# step 2. process face detection
# note that the difference between the image data formated as numpy.ndarray read by dlib and cv2 is that dlib read it channels as *R G B* order while cv2 read as *B G R*,so you should do one more step to convert the image if using cv2
image_path = "sample.jpg"
img = dlib.load_rgb_image(image_path)
# img = cv2.cvtColor(cv2.imread(image_path),cv2.COLOR_BGR2RGB)
detections = face_detector(img, 1) # dlib.mmod_rectangles
# step 3. get shape of one face for example
detection = detections[0] # dlib.mmod_rectangle
# the mmod_rectangle contains two parts : confidence and rect
shape = face_shape_predictor(img, detection.rect) # dlib.full_object_detection
step 4. get all the face landmark points
landmark_points = shape.parts() # dlib.points
将所有的68维度人脸特征关键点连接之后的效果图如下所示

关键点的顺序与对应面部位置: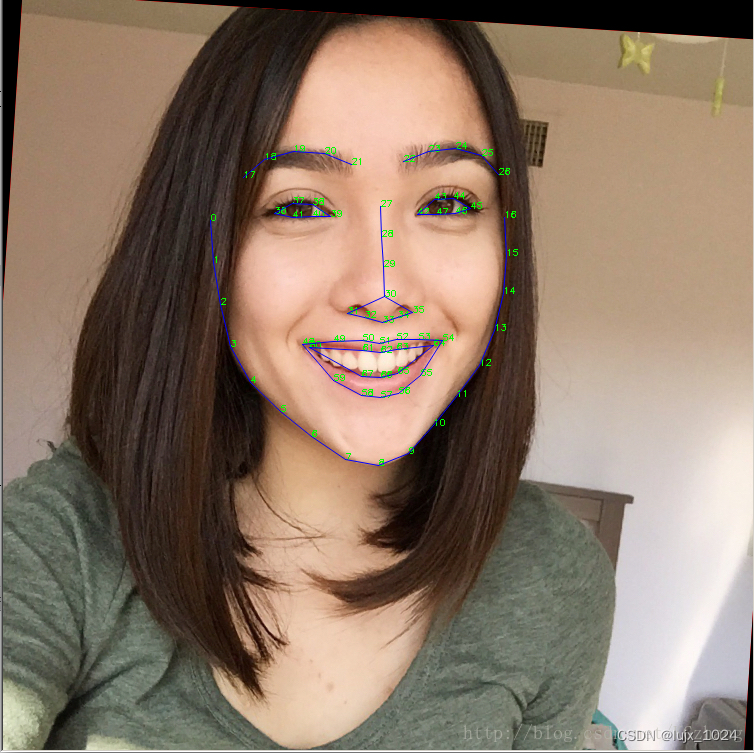
dlib.fhog_object_detector和 dlib.cnn_face_detection_model_v1,前者基于HOG模型,后者基于CNN模型,前者检测方法调用为__call(img)__ ->dlib.rectangles和run(img,upsample_num,threshold)->(dlib.rectangles,List[scores:int],List[int]),后者检测方法调用为__call(img)__->dlib.mmod_rectanglesdlib.shape_predictor,预测调用方法__call__(self,image, box: dlib.rectangle)->dlib.full_object_detectiondlib.full_object_detection, 常用方法 part(self, idx: int)->dlib.point 单个关键点信息 、parts(self)->dlib.points 所有的关键点信息dlib.point关键点,成员包含x,y,dlib.points关键点列表dlib.shape_predictorclass dlib.shape_predictor
This object is a tool that takes in an image region containing some object and outputs a set of point locations that define the pose of the object. The classic example of this is human face pose prediction, where you take an image of a human face as input and are expected to identify the locations of important facial landmarks such as the corners of the mouth and eyes, tip of the nose, and so forth.
__call__(self: dlib.shape_predictor, image: array, box: dlib.rectangle) → dlib.full_object_detection
requires
image is a numpy ndarray containing either an 8bit grayscale or RGB image.
box is the bounding box to begin the shape prediction inside.
ensures
This function runs the shape predictor on the input image and returns a single full_object_detection.
__init__(*args, **kwargs)
Overloaded function.
__init__(self: dlib.shape_predictor) -> None
__init__(self: dlib.shape_predictor, arg0: unicode) -> None
Loads a shape_predictor from a file that contains the output of the train_shape_predictor() routine.
save(self: dlib.shape_predictor, predictor_output_filename: unicode) → None
Save a shape_predictor to the provided path.
dlib.full_object_detectionclass dlib.full_object_detection
This object represents the location of an object in an image along with the positions of each of its constituent parts.
__init__(self: dlib.full_object_detection, rect: dlib.rectangle, parts: object) → None
requires
rect: dlib rectangle
parts: list of dlib.point, or a dlib.points object.
num_parts
The number of parts of the object.
part(self: dlib.full_object_detection, idx: int) → dlib.point
A single part of the object as a dlib point.
parts(self: dlib.full_object_detection) → dlib.points
A vector of dlib points representing all of the parts.
rect
Bounding box from the underlying detector. Parts can be outside box if appropriate.
dlib.point dlib.pointsclass dlib.point
This object represents a single point of integer coordinates that maps directly to a dlib::point.
__init__(*args, **kwargs)
Overloaded function.
__init__(self: dlib.point, x: int, y: int) -> None
__init__(self: dlib.point, p: dlib::vector<double, 2l>) -> None
__init__(self: dlib.point, v: numpy.ndarray[int64]) -> None
__init__(self: dlib.point, v: numpy.ndarray[float32]) -> None
__init__(self: dlib.point, v: numpy.ndarray[float64]) -> None
normalize(self: dlib.point) → dlib::vector<double, 2l>
Returns a unit normalized copy of this vector.
x
The x-coordinate of the point.
y
The y-coordinate of the point.
class dlib.points
An array of point objects.
__init__(*args, **kwargs)
Overloaded function.
__init__(self: dlib.points) -> None
__init__(self: dlib.points, arg0: dlib.points) -> None
Copy constructor
__init__(self: dlib.points, arg0: iterable) -> None
__init__(self: dlib.points, initial_size: int) -> None
append(self: dlib.points, x: dlib.point) → None
Add an item to the end of the list
clear(self: dlib.points) → None
count(self: dlib.points, x: dlib.point) → int
Return the number of times x appears in the list
extend(*args, **kwargs)
Overloaded function.
extend(self: dlib.points, L: dlib.points) -> None
Extend the list by appending all the items in the given list
extend(self: dlib.points, arg0: list) -> None
insert(self: dlib.points, i: int, x: dlib.point) → None
Insert an item at a given position.
pop(*args, **kwargs)
Overloaded function.
pop(self: dlib.points) -> dlib.point
Remove and return the last item
pop(self: dlib.points, i: int) -> dlib.point
Remove and return the item at index i
remove(self: dlib.points, x: dlib.point) → None
Remove the first item from the list whose value is x. It is an error if there is no such item.
resize(self: dlib.points, arg0: int) → None
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















