软件

产品


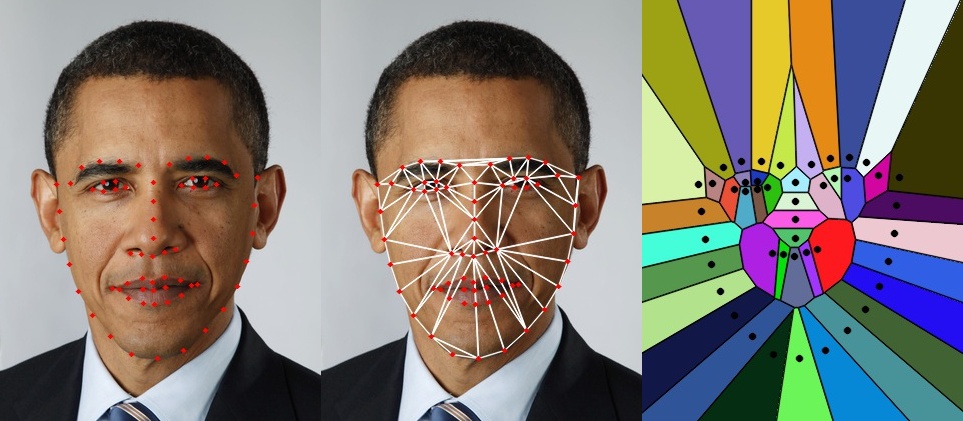
使用三角剖分 实现人脸替换,三角剖分可以尽量让 人脸上面所在的三角形在同一个平面上,这样再进行 放射变换的 时候投影变换带来的误差才比较小。
所以关键点检测越多,效果会越细。
#include <dlib/image_processing/frontal_face_detector.h>#include <dlib/image_processing/render_face_detections.h>#include <dlib/image_processing.h>#include <dlib/gui_widgets.h>#include <dlib/image_io.h>#include <iostream>#include<dlib/opencv/cv_image_abstract.h>//#include <opencv2/opencv.hpp>#include<opencv2/imgproc/imgproc.hpp>#include<opencv2/highgui/highgui.hpp>#include<vector> using namespace cv;using namespace dlib;using namespace std; // ---------------------------------------------------------------------------------------- /* detect 68 face landmarks on the input image by using the face landmark detector in dlib.//*/void faceLandmarkDetection(dlib::array2d<unsigned char>& img, shape_predictor sp, std::vector<Point2f>& landmark){ dlib::frontal_face_detector detector = get_frontal_face_detector(); //dlib::pyramid_up(img); std::vector<dlib::rectangle> dets = detector(img); //cout << "Number of faces detected: " << dets.size() << endl; full_object_detection shape = sp(img, dets[0]); //image_window win; //win.clear_overlay(); //win.set_image(img); //win.add_overlay(render_face_detections(shape)); for (int i = 0; i < shape.num_parts(); ++i) { float x = shape.part(i).x(); float y = shape.part(i).y(); landmark.push_back(Point2f(x, y)); } } /*//add eight keypoints to the keypoints set of the input image.//the added eight keypoints are the four corners points of the image, plus four median points of the four edges of the image.*/ void addKeypoints(std::vector<Point2f>& points, Size imgSize){ points.push_back(Point2f(1, 1)); points.push_back(Point2f(1, imgSize.height - 1)); points.push_back(Point2f(imgSize.width - 1, imgSize.height - 1)); points.push_back(Point2f(imgSize.width - 1, 1)); points.push_back(Point2f(1, imgSize.height / 2)); points.push_back(Point2f(imgSize.width / 2, imgSize.height - 1)); points.push_back(Point2f(imgSize.width - 1, imgSize.height / 2)); points.push_back(Point2f(imgSize.width / 2, 1));} /*// calculate the keypoints on the morph image.*/ void morpKeypoints(const std::vector<Point2f>& points1, const std::vector<Point2f>& points2, std::vector<Point2f>& pointsMorph, double alpha){ for (int i = 0; i < points1.size(); i++) { float x, y; x = (1 - alpha) * points1[i].x + alpha * points2[i].x; y = (1 - alpha) * points1[i].y + alpha * points2[i].y; pointsMorph.push_back(Point2f(x, y)); }} /*//perform Delaunay Triangulation on the keypoints of the morph image.*/struct correspondens { std::vector<int> index;}; void delaunayTriangulation(const std::vector<Point2f>& points1, const std::vector<Point2f>& points2, std::vector<Point2f>& pointsMorph, double alpha, std::vector<correspondens>& delaunayTri, Size imgSize){ //cout<<"begin delaunayTriangulation......"<<endl; morpKeypoints(points1, points2, pointsMorph, alpha); //cout<<"done morpKeypoints, pointsMorph has points "<<pointsMorph.size()<<endl; Rect rect(0, 0, imgSize.width, imgSize.height); for (int i = 0; i<pointsMorph.size(); ++i) { cout << pointsMorph[i].x << " " << pointsMorph[i].y << endl; } cv::Subdiv2D subdiv(rect); for (std::vector<Point2f>::iterator it = pointsMorph.begin(); it != pointsMorph.end(); it++) subdiv.insert(*it); //cout<<"done subdiv add......"<<endl; std::vector<Vec6f> triangleList; subdiv.getTriangleList(triangleList); //cout<<"traingleList number is "<<triangleList.size()<<endl; //std::vector<Point2f> pt; //correspondens ind; for (size_t i = 0; i < triangleList.size(); ++i) { std::vector<Point2f> pt; correspondens ind; Vec6f t = triangleList[i]; pt.push_back(Point2f(t[0], t[1])); pt.push_back(Point2f(t[2], t[3])); pt.push_back(Point2f(t[4], t[5])); //cout<<"pt.size() is "<<pt.size()<<endl; if (rect.contains(pt[0]) && rect.contains(pt[1]) && rect.contains(pt[2])) { //cout<<t[0]<<" "<<t[1]<<" "<<t[2]<<" "<<t[3]<<" "<<t[4]<<" "<<t[5]<<endl; int count = 0; for (int j = 0; j < 3; ++j) for (size_t k = 0; k < pointsMorph.size(); k++) if (abs(pt[j].x - pointsMorph[k].x) < 1.0 && abs(pt[j].y - pointsMorph[k].y) < 1.0) { ind.index.push_back(k); count++; } if (count == 3) //cout<<"index is "<<ind.index[0]<<" "<<ind.index[1]<<" "<<ind.index[2]<<endl; delaunayTri.push_back(ind); } //pt.resize(0); //cout<<"delaunayTri.size is "<<delaunayTri.size()<<endl; } } /*// apply affine transform on one triangle.*/void applyAffineTransform(Mat &warpImage, Mat &src, std::vector<Point2f> & srcTri, std::vector<Point2f> & dstTri){ Mat warpMat = getAffineTransform(srcTri, dstTri); warpAffine(src, warpImage, warpMat, warpImage.size(), cv::INTER_LINEAR, BORDER_REFLECT_101);} /*//the core function of face morph.//morph the two input image to the morph image by transacting the set of triangles in the two input image to the morph image.*/void morphTriangle(Mat &img1, Mat &img2, Mat &img, std::vector<Point2f> &t1, std::vector<Point2f> &t2, std::vector<Point2f> &t, double alpha){ Rect r = cv::boundingRect(t); Rect r1 = cv::boundingRect(t1); Rect r2 = cv::boundingRect(t2); std::vector<Point2f> t1Rect, t2Rect, tRect; std::vector<Point> tRectInt; for (int i = 0; i < 3; ++i) { tRect.push_back(Point2f(t[i].x - r.x, t[i].y - r.y)); tRectInt.push_back(Point(t[i].x - r.x, t[i].y - r.y)); t1Rect.push_back(Point2f(t1[i].x - r1.x, t1[i].y - r1.y)); t2Rect.push_back(Point2f(t2[i].x - r2.x, t2[i].y - r2.y)); } Mat mask = Mat::zeros(r.height, r.width, CV_32FC3); fillConvexPoly(mask, tRectInt, Scalar(1.0, 1.0, 1.0), 16, 0); Mat img1Rect, img2Rect; img1(r1).copyTo(img1Rect); img2(r2).copyTo(img2Rect); Mat warpImage1 = Mat::zeros(r.height, r.width, img1Rect.type()); Mat warpImage2 = Mat::zeros(r.height, r.width, img2Rect.type()); applyAffineTransform(warpImage1, img1Rect, t1Rect, tRect); applyAffineTransform(warpImage2, img2Rect, t2Rect, tRect); Mat imgRect = (1.0 - alpha)*warpImage1 + alpha*warpImage2; multiply(imgRect, mask, imgRect); multiply(img(r), Scalar(1.0, 1.0, 1.0) - mask, img(r)); img(r) = img(r) + imgRect; //cv::imshow("img", img); //cv::waitKey(0);} /*//morp the two input images into the morph image.//first get the keypoints correspondents of the set of triangles, then call the core function.*/void morp(Mat &img1, Mat &img2, Mat& imgMorph, double alpha, const std::vector<Point2f> &points1, const std::vector<Point2f> &points2, const std::vector<correspondens> &triangle){ img1.convertTo(img1, CV_32F); img2.convertTo(img2, CV_32F); std::vector<Point2f> points; morpKeypoints(points1, points2, points, alpha); int x, y, z; int count = 0; for (int i = 0; i<triangle.size(); ++i) { correspondens corpd = triangle[i]; x = corpd.index[0]; y = corpd.index[1]; z = corpd.index[2]; std::vector<Point2f> t1, t2, t; t1.push_back(points1[x]); t1.push_back(points1[y]); t1.push_back(points1[z]); t2.push_back(points2[x]); t2.push_back(points2[y]); t2.push_back(points2[z]); t.push_back(points[x]); t.push_back(points[y]); t.push_back(points[z]); morphTriangle(img1, img2, imgMorph, t1, t2, t, alpha); //count++; //string shun = "hunhe"; //if (count % 10 == 0 || count == triangle.size() - 1 || count == triangle.size()) // imwrite(shun+to_string(count)+".jpg", imgMorph); } } int main(int argc, char** argv){ if (argc < 3) { cout << "Give some image files as arguments to this program." << endl; return 0; } //-------------- step 1. load the input two images -------------------------------------------- shape_predictor sp; deserialize("F:\\software\\dlib-19.17\\model\\dlib-models-master\\shape_predictor_68_face_landmarks.dat") >> sp; dlib::array2d<unsigned char> img1, img2; dlib::load_image(img1, argv[1]); dlib::load_image(img2, argv[2]); std::vector<Point2f> landmarks1, landmarks2; Mat img1CV = imread(argv[1]); Mat img2CV = imread(argv[2]); if (!img1CV.data || !img2CV.data) { printf("No image data \n"); return -1; } else cout << "image readed by opencv" << endl; //----------------- step 2. detect face landmarks --------------------------------------------- faceLandmarkDetection(img1, sp, landmarks1); faceLandmarkDetection(img2, sp, landmarks2); cout << "landmark2 number is " << landmarks2.size() << endl; //add some land marks in the edges to get better performance. addKeypoints(landmarks1, img1CV.size()); addKeypoints(landmarks2, img2CV.size()); cout << "landmark number after added is " << landmarks1.size() << endl; /*for (int i=0;i<landmarks1.size();++i) { circle(img1CV, landmarks1[i], 2, CV_RGB(255, 255, 255), 1, 8, 3); } imshow("landmark",img1CV); cv::waitKey(0); */ //--------------- step 3. face morp ---------------------------------------------- std::vector<Mat> resultImage; resultImage.push_back(img1CV); cout << "add the first image" << endl; for (double alpha = 0.1; alpha<1; alpha += 0.1) { Mat imgMorph = Mat::zeros(img1CV.size(), CV_32FC3); std::vector<Point2f> pointsMorph; std::vector<correspondens> delaunayTri; delaunayTriangulation(landmarks1, landmarks2, pointsMorph, alpha, delaunayTri, img1CV.size()); cout << "done " << alpha << " delaunayTriangulation..." << delaunayTri.size() << endl; morp(img1CV, img2CV, imgMorph, alpha, landmarks1, landmarks2, delaunayTri); cout << "done " << alpha << " morph.........." << endl; resultImage.push_back(imgMorph); cout << "add the" << alpha * 10 + 1 << "image" << endl; } resultImage.push_back(img2CV); cout << "resultImage number is" << resultImage.size() << endl; //----------- step 4. write into vedio -------------------------------- for (int i = 0; i<resultImage.size(); ++i) { //output_src<<resultImage[i]; string st = argv[1]; char t[20]; sprintf(t, "%d", i); st = st + t; st = st + ".jpg"; imwrite(st, resultImage[i]); } std::vector<Mat> pic; for (int i = 0; i<resultImage.size(); ++i) { string filename = argv[1]; char t[20]; sprintf(t, "%d", i); filename = filename + t; filename = filename + ".jpg"; pic.push_back(imread(filename)); } string vedioName = argv[1]; vedioName = vedioName + argv[2]; vedioName = vedioName + ".avi"; VideoWriter output_src(vedioName, CV_FOURCC('M', 'J', 'P', 'G'), 5, resultImage[0].size()); for (int i = 0; i<pic.size(); ++i) { output_src << pic[i]; } cout << "vedio wrighted....." << endl; system("pause"); return 0; }
替换过程图

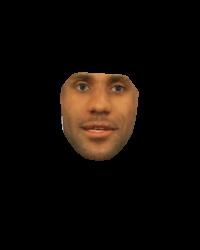






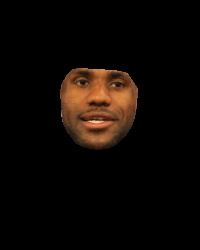
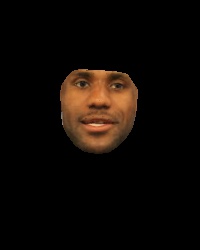
原图:

免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020