















































软件

产品


打字不易,转载请注明。
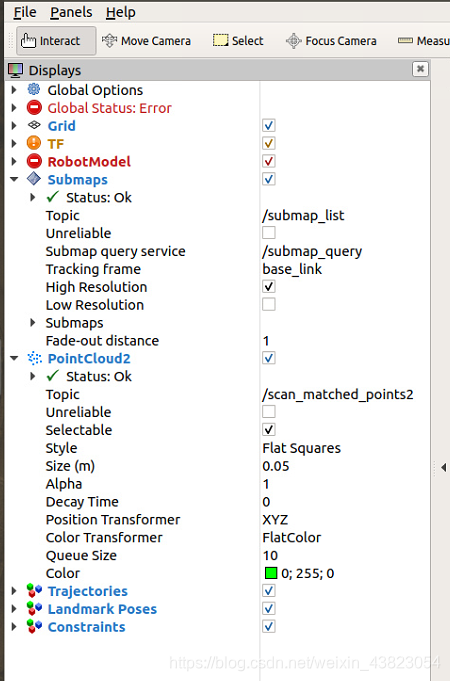
use_landmarks= true
此时命令行窗口显示
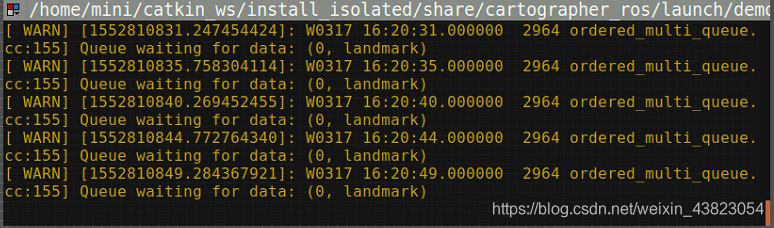
此时 程序 会挂起,一直等到接收到landmark话题才开始运行。因此landmark话题要一直按一定频率(10HZ)发送,没有观测到landmark时要发送空的话题。
首先通过ros topic list查看此时cartographer发布的话题
rostopic list
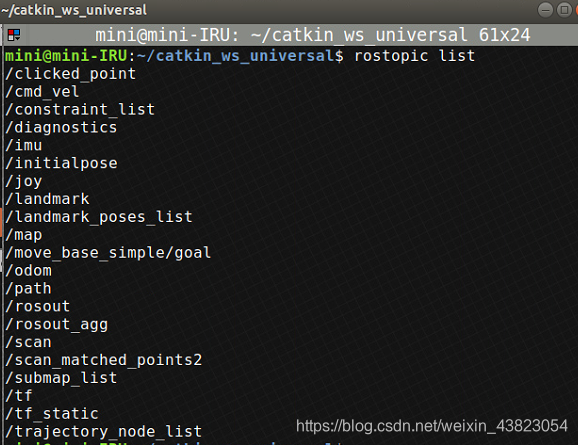
找到所需要发布的landmark话题 其中还有/landmark_poses_list话题为cartographer接收到/landmark 信息 后发出的landmark的坐标
查看其数据类型
mini@mi免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















