















































软件

产品


基于NX 软件MCD模块的仿真步骤
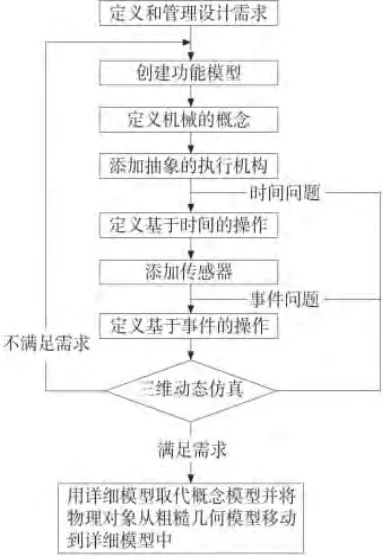
1、设计需求的定义和管理;首先是系统工程,第一步要定义该设计的各种需求、功能、逻辑并逐一列出;该模块是整个设计的初始要求,以及该设计要达到的目标和实现的功能。属于一个总体性的控制要求。但是在具体机电联合仿真过程中并没有体现出来需求定义的作用,对机电运动联合仿真没有什么影响。
2、创建功能模型;简单来说就是绘制三维模型,该三维模型能实现需求的功能,且该三维模型尽可能的实现零部件的重复使用,消除重新设计。就是总图、组件图、部件图、零件图、通用件、标准件。该模型可以用UG机械建模模块提前绘制出来,也可以用机电概念进行绘制,或者从其他格式的三维模型进行导入。注意:该模型导入后一般不需要进行相关简化,只有当运动部件构成较多时可对相关部件进行删除或合并。

3、仿真开关按钮,该模块不需要特殊设置,当模型所有的参数设置完成后即可通过该位置对模型运动进行启动或者停止。
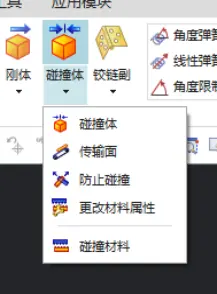
4、定义机械概念物理属性;对刚体、碰撞体、传输面、碰撞材料定义;对连接的运动副进行定义,包括铰链链接、固定链接、滑动链接以及球链接等。
5、首先对于需要运动的部件,需要定义其刚体的属性。如右图所示,定义完成后会赋予部件质量属性。同时对于流水线性质的仿真,可设置对象源,表示相关的零部件可源源不断的从这里生成;对象收集器则是收集这些零部件的,对象变换器可以模拟部件经过加工后的一个状态。
6、碰撞体:对于有接触和力的传递部件,需要在其刚体属性的基础上对其进行碰撞体定义。举例来说:一个抓取手要抓取一个零件,从位置1移动到位置2;则需要对抓取手与零件接触的面定义碰撞体,对零件与抓取手接触的面定义碰撞体;或者对整个抓取手和整个零件全部定义位碰撞体。例子2,当纸箱在传送带上运行时,需要对传送带上顶面和纸箱的下地面定义碰撞体属性。


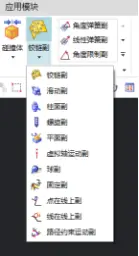
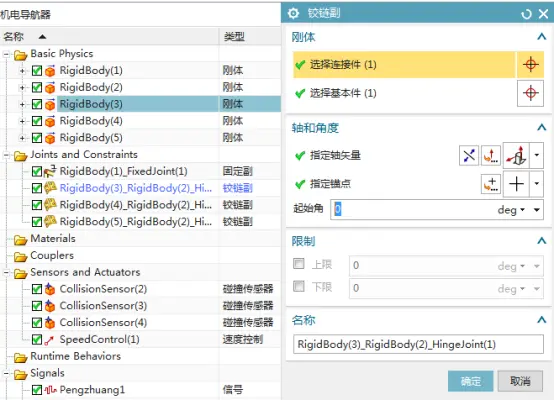
7、运动副的定义:对各种运动需要定义其运动副才能运转,UGNX提供了多种运动副可以使用,用法与运动学仿真一致,也可以通过运动学仿真定义后再导入到机电概念设计内使用。

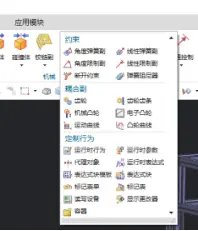
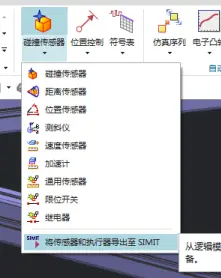
8、添加传感器,UG提供多种传感器设置。当所定义的刚体运动到预先设定的位置后,相关的传感器就会触发,得到信号。

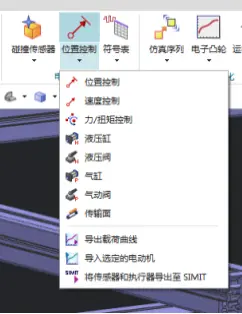
9、添加执行机构;MCD只提供了两种类型的执行机构:速度控制和位置控制。执行机构需要添加到具体的运动副上面,对运动副起到一个驱动的作用;两种类型虽然方式不同,但是可以达到同一个运动效果。
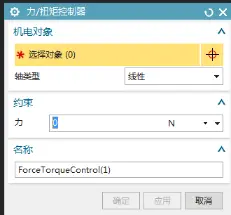
MCD还可以对相关运动副预先添加力和扭矩;对于液压缸和气压缸也有对应的驱动方式可以添加,他们的运动要通过液压阀和气动阀来控制。
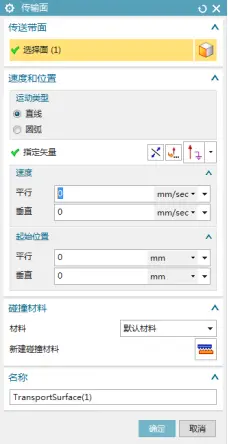
传输面是定义一个面的运动,这个面可以赋予一个运动速度。

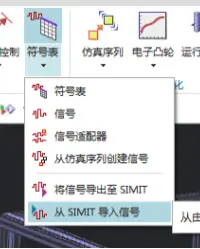
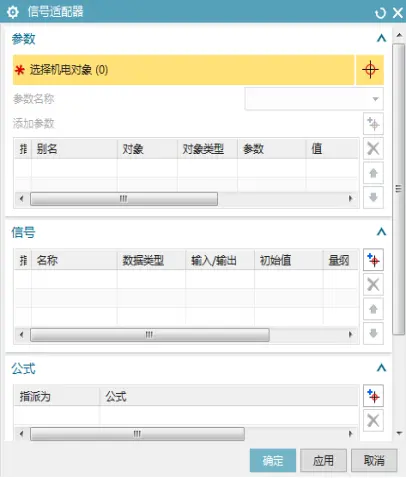
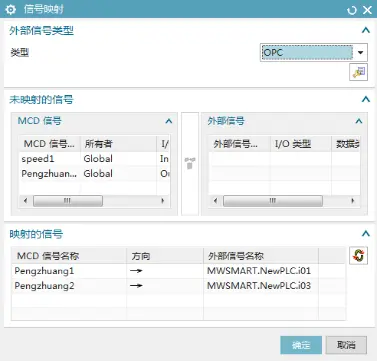
10、信号,MCD可以创建多种信号,这种信号均在符号表内保存。信号的创建主要是源于之前所创建的传感器、速度控制量、位置控制等。与此同时该信号可以通过信号适配器与外部OPC的信号进行匹配。当所有的信号都建立以后,与外部PLC程序进行连接,同时运行PLC程序和MCD程序进行仿真。这时候操作外部触摸屏对设备进行运行控制,以查看设备在PLC控制程序下的运动是否符合设计要求。




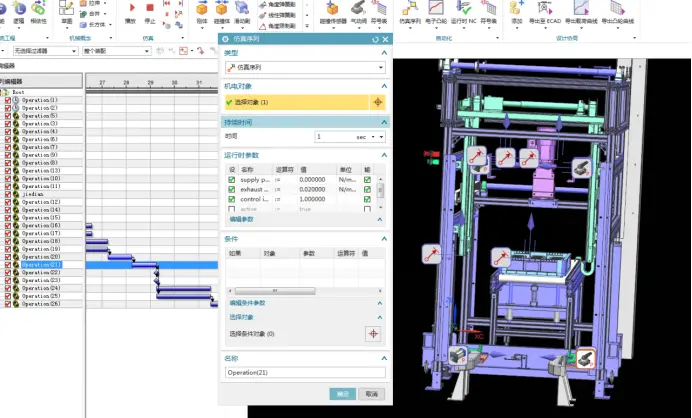
11、定义基于时间的操作;每个执行机构都对应有一个基于时间的操作,且排列各个操作之间顺序的是基于时间概念的。也就是说每一个速度控制和位置控制都对应的有一个时间序列,有且都必须有。根据时间序列来定义动作的开始时间和结束时间。
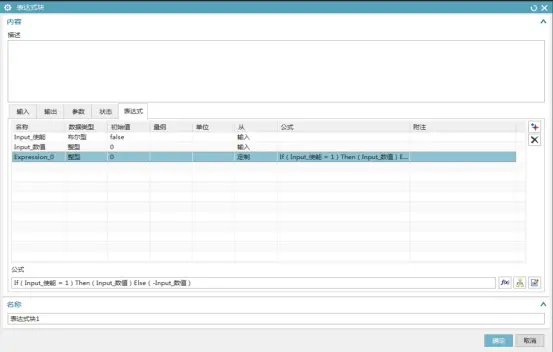
添加传感器和定义基于事件的操作,即当碰撞传感器触发后会引起下一个动作的开始。 定义组合配套的事件操作。三维动态仿真,数据提取和处理,模型改进和修正。用详细模型取代概念模型。表达式块的定义,通过表达式块的定义,可以对MCD内部信号参数进行逻辑计算,最后得到想要的值;可以定义输入、输出与信号值相关,还可以设定参数表达式。
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















