















































软件

产品


前面两篇文章分别讲解了 气动力的获取和动力学模型的建议,最后一篇文章讲解:
系统分析和控制系统设计
为了设计无人机的高度保持和速度保持功能,我们可以对无人机进行开环动力学分析,这需要首先把无人机模型拉至设计工作点附近配平后,并进行小扰动分析,辨识其该点的近似线性系统参数。这通常使用 Simulink 和控制相关的工具箱完成,如Linear Analysis Toolbox,Control System Toolbox。并根据辨识的线性系统设计控制律。
无人机的高度保持可简单划分为两个回路,内回路主要负责姿态保持以维持指定的航迹倾角。外回路则需根据自动驾驶仪面板上的高度指令生成航迹倾角指令,当高度指令变化时,使得航迹倾角向上或向下以进行爬升和下降,高度变化时还需考虑推力指令以保证顺利爬升或下降。与之类似,速度保持则即包括推力控制也涉及俯仰安定面以使得速度变化时高度能保持稳定。
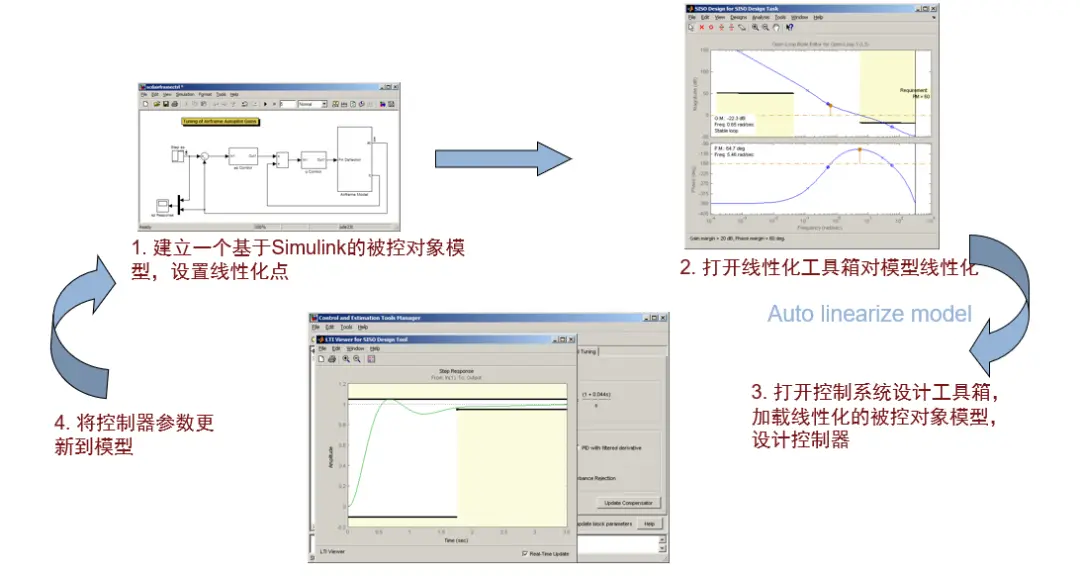
控制系统设计流程
下图为根据以上分析设计的控制器架构图。
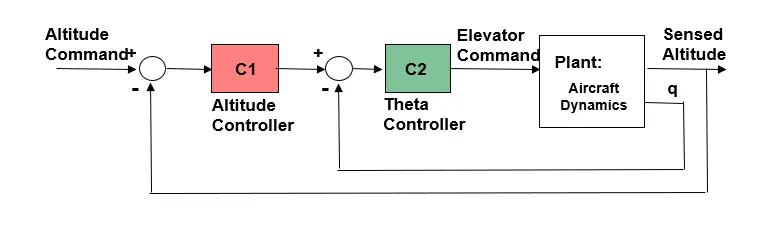
高度保持控制器架构
设计时,首先进行内回路设计,即姿态角设计,然后进行外回路设计,即高度保持控制。设计高度保持功能(即外回路)时,需把内回路连带动力学看成一个被控对象进行分析和设计。通
常情况下需先选定一些工作点,根据飞行品质要求在每个工作点进行设计。
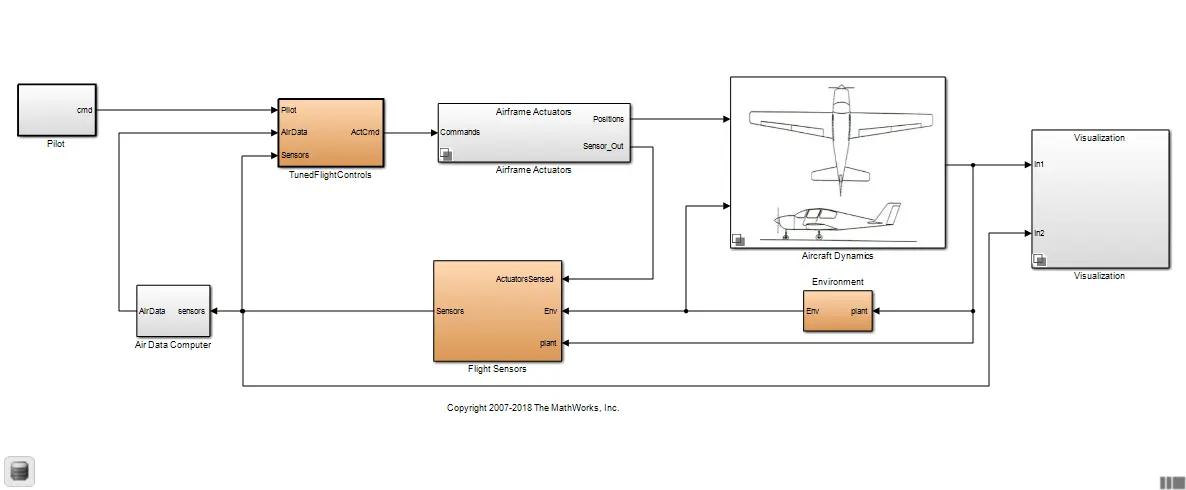
完整的无人机闭环控制模型
最后,我们终于搭好了模型,并且完成了控制设计。
但总觉得少了点什么,如果能可视化仿真不是更好吗,MATLAB/Simulink 允许设计师建立与 Flightgear 的连接,可以把无人机的位置姿态甚至舵面位置,起落架位置都在视景平台上显示出来。下面的视频演示了无人机从平飞到在自动驾驶仪面板上逐次输入高度爬升指令,加速指令,高度下降指令的 3D 演示,也演示了实时绘制飞行数据的内容。
本文转载自微信公众号:matlab。
想要进无人机交流群的同学,可以添加微信:fangzhenxiu999 进群交流
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















