















































软件

产品


基本环境概述:
1、主机 win10+MATLAB 2021b
2、虚拟机 ubuntu 20.04 + ROS noetic
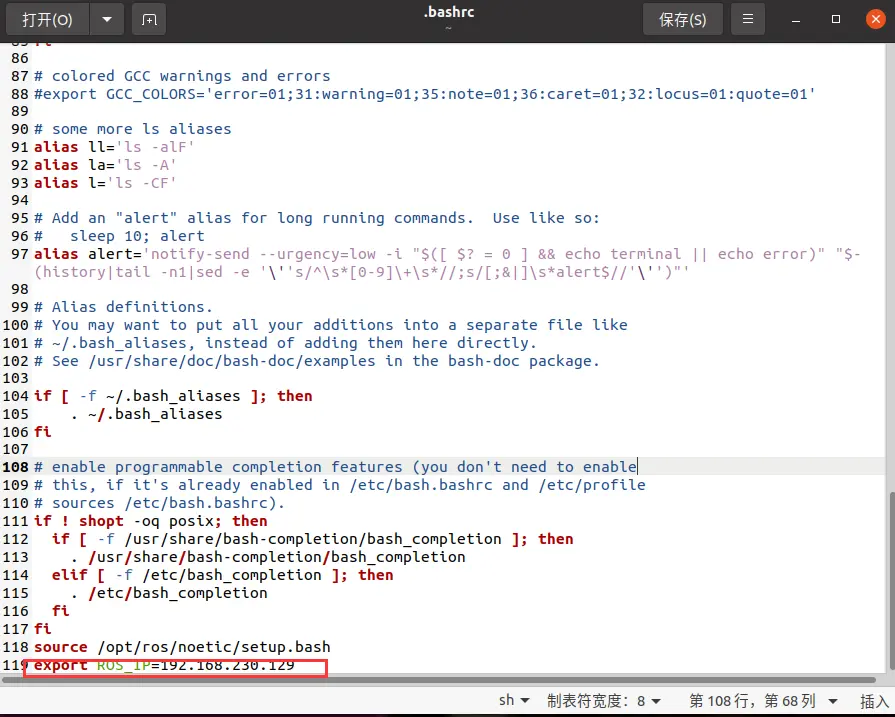
网络通信
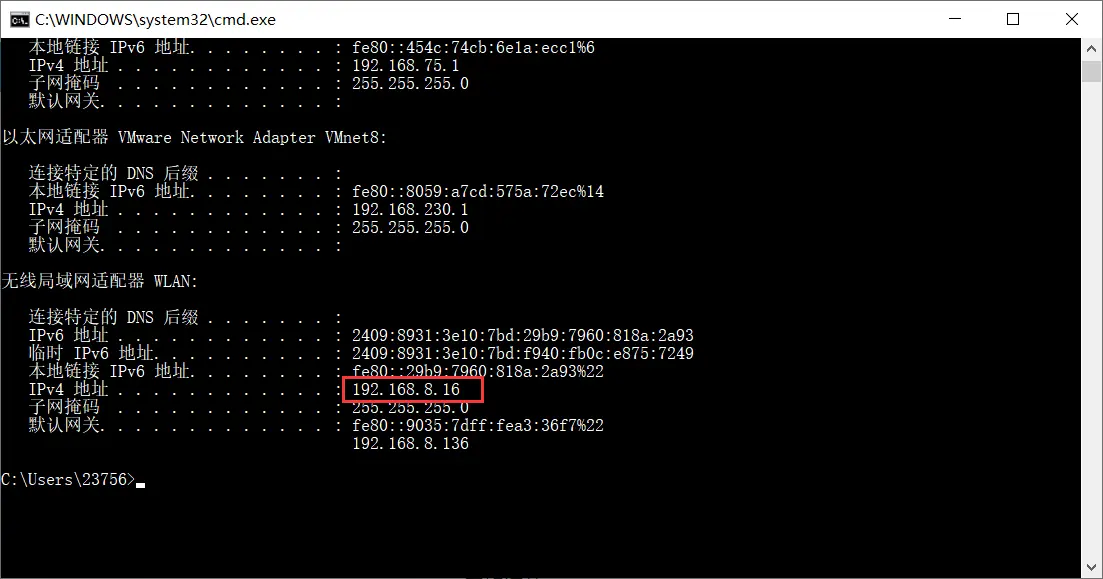
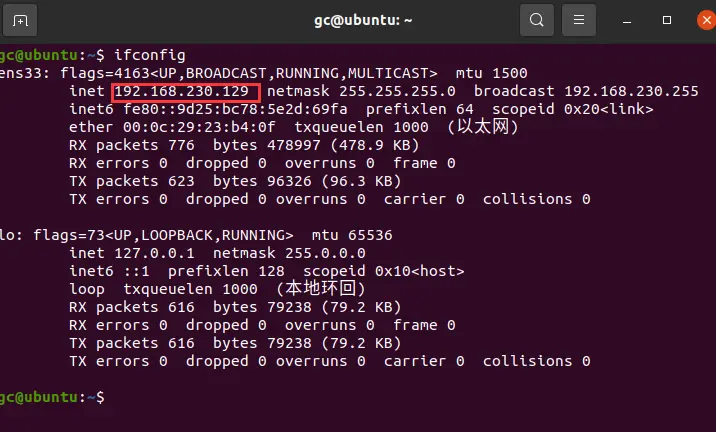
添加 export ROS_IP=192.168.230.129 到 .bashrc

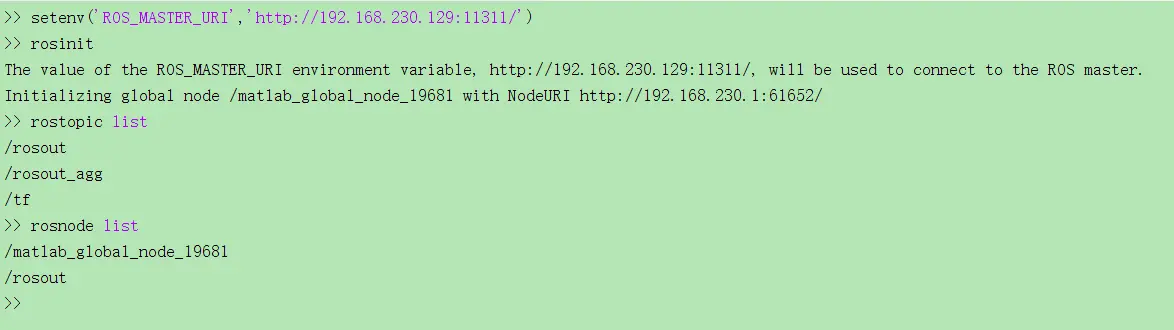
在matlab下输入命令
setenv('ROS_MASTER_URI','http://192.168.230.129:11311/')
% 建立网络通信
rosinit
% 启动内核
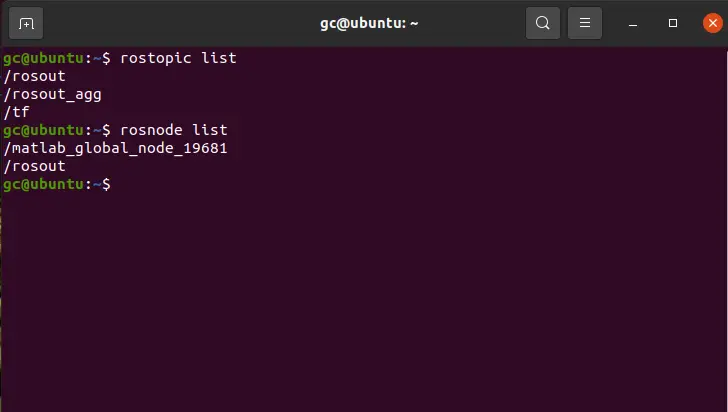
rostopic list
rosnode list
% 测试连接
rosshutdown
% 关闭连接
同样,可以在ubuntu系统里测试
roscore
rostopic list
rosnode list
%%%%% matlab 是 ros 的一个 node
新建一个自动化脚本,命名matlab2ros1.m
rosshutdown
setenv('ROS_MASTER_URI','http://192.168.230.129:11311/');
rosinit
for i = 1:10
cmdpub = rospublisher('/turtle1/cmd_vel',rostype.geometry_msgs_Twist);
cmdmsg = rosmessage(cmdpub);
pause(5), % ensure the publisher successfully
cmdmsg.Linear.X = 8;
cmdmsg.Angular.Z = 8;
send(cmdpub,cmdmsg)
end
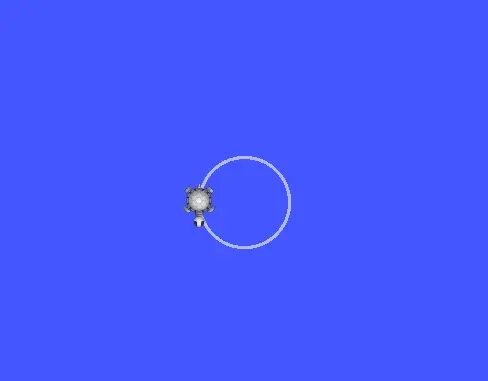
爱的魔力转圈圈
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















