















































软件

产品


仿真建模行业薪酬报告| 专业技能对口高薪岗位也能「一举拿下」!(附6月32个城市报告)

导读
ABAQUS中的动力学求解有两种方法,一种是适用于线性问题的模态分析法或振型叠加法,相关概念可参考机械动力学等书籍。还有一种是适用于非线性问题的积分法。而积分法又分为隐式积分和显式积分法,下面将针对这两种方法在求解算法、求解设置、适用问题上的区别给大家做简介,希望能够解决一些困惑。
1
隐式积分方法
隐式算法即指求解当前增量步需要使用增量步结束的状态,具有耦合关系,线性问题会进行矩阵求逆,非线性情况下需要使用迭代法求解非线性方程组,耗费资源巨大。会经常出现不收敛问题。在求解设置上,包含两种设置增量步长的方法:
1自动时间步
采用半步残差法确定自动时间增量步长,需设置初始步长、最小步长和最大增量步数,软件根据半步残差力或称不平衡力自行进行调整。关于残差力的概念可类比与前面介绍过的内力与外力的差值,当其足够小,视为问题有稳定解答。
2 固定时间步
直接给出固定的时间增量步长,若在保证精度下,因取消半步残差计算可节省计算成本。
适用问题:瞬态、准静态问题。对于瞬态问题使用HHT积分,对于准静态使用向后欧拉算法。

图1.隐式计算瞬态问题
2
显式积分方法
显式积分方法使用的是中点插值的办法,又称中心差分法,这里可能会有人将中心差分法与有限差分法混淆。有限差分法在前面连载的弹性力学有限元理论中已有涉及,是作为有限单元法平行的解决常见力学、运动学问题的方法。而无论是隐式积分算法还是显式积分算法求解的都是动力学矩阵方程属于有限单元法范畴内。
根据平衡条件(隐式动力学同样满足):

求解加速度后可直接使用中心差分法得到速度并积分得到位移,由于是对时间差分,因此必须保证时间增量步够小,才能获得准确的结果。显示计算中的增量一般很多,但无需求解方程组,不意味着计算量很大。因此若是求解非线性动力学时可优先考虑显式。
在求解设置上,同样包含两种设置增量步长的方法:固定时间步长除了由用户自己设置还根据各单元的估计值来确定;而自动时间步长的依据是物体整体或者各个单元的频率,并且受到网格整体大小、材料、网格质量等的影响
适用问题:高速(冲击、碰撞)、复杂接触等问题
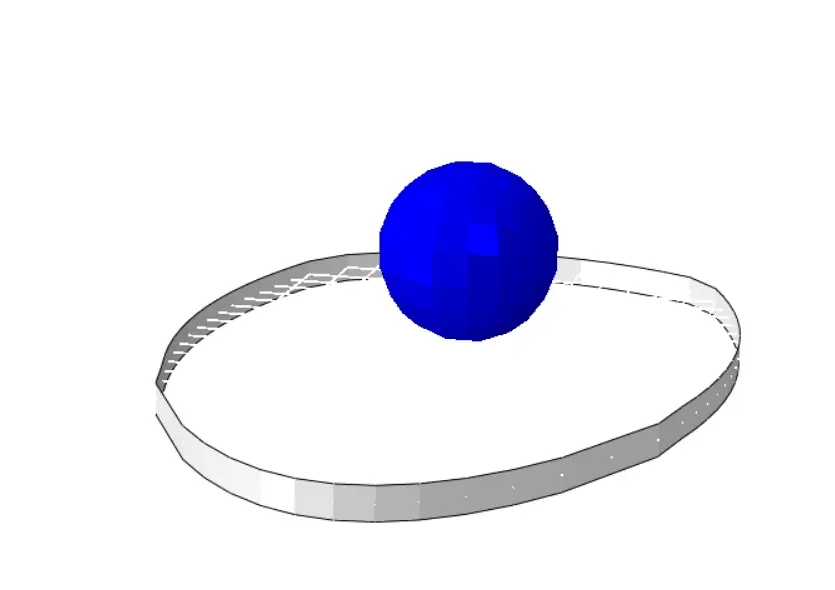
图2.显式计算高速问题
¥19.9基础课推荐-没有卖课的意思,但你可以进去逛逛







声明:部分图片转自网络,如有不当、涉及侵权请联系我们删除。欢迎分享,禁止私自转载,转载请联系我们。
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















