















































软件

产品


学习完gazebo如何控制机器人后转为学习webots。
主要参考了CSDN:全网最全的Webots资料在这里
https://blog.csdn.net/weixin_43455581/article/details/108711611
https://blog.csdn.net/crp997576280/category_9855084.html
官网的很多例题,并给出了简介,需要什么功能照着简介找对应的就可以了
具体内建控制器怎么写,建模怎么弄,可以参考webots软件自带的例程webtos/projects/samples
新建工程目录,不要直接直接在原来的webots目录下,这样由于webots保护,无法创建一些文件。
wizard->new project directory。然后再进行下面的步骤
如何创建一个机器人
PROTO nodes(Current Project)中导入当前工程路径下的protos文件夹下。重新打开该窗口就可以发现有一个模型只做到这这步,下次再打开模型就消失了。需要转换其为基本节点:点击模型->covert to base node(s)新建世界
file->new world。会出现一片漆黑,然后左边场景树。一个是worldinfo一个是viewpoint。点击场景树中的选项,其下方有个参数编辑区,截图修改场景树中模型或属性的数值。其中worldinfo就类似gazebo中的world,定义了一堆世界信息比如重力加速度、仿真步长等。
ctrl+shift+A或直接按下图加号可以插入模型

image.png
创建环境物体
先插入solid节点,然后点击场景树中solid,选中其children,添加shape。appearance是gazebo中的纹理textures,而geometry描述实体形状。点击geometry添加一个sphere球(也可以添加mesh网格)。此时geometry 后出现Sphere,然后点开可以修改半径和细分度。然后为appearance添加纹理,双击textures,添加imageTextures。在纹理图片中的url属性中选择纹理图片路径
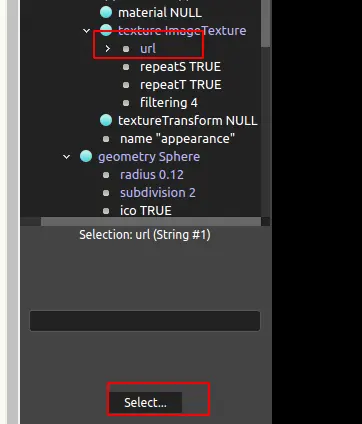
image.png
。
现在只是有可视形状(对应gazebo中vision)。还没有物理属性,所以无法对仿真做出动作响应。点击physics,添加physics节点,然后可以设置 质量、密度(mass density二选一,其中一个必须为-1)。这样他就有了物理属性,但是有物理属性后,他还没有碰撞实体,现在只有shape这个现实外形。因此对boundingObject(类似collision)进行设置。可以直接复制vision也就是children中的shape属性给他使用
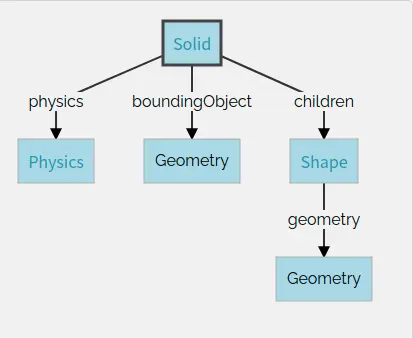
image.png
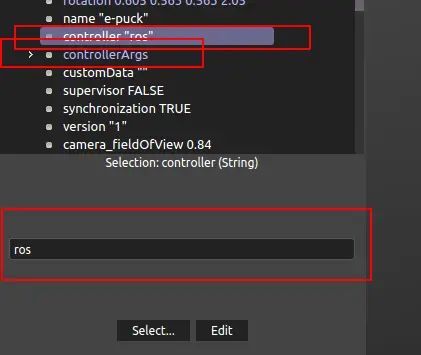
控制器代码, wizard-> new robot_controller 创建对应语言的控制器文件。具体查看博客内容作为控制代码模板。然后在机器人的controller中选择对应控制器。 其中控制器参数是用来传入程序的入口参数?在webot_ros中用来指定机器人的unique name。
与gazebo和ros通信有gazebo_ros_control一样。webot有webots_ros,其实也是机器人控制器或插件内实现了服务器、数据、话题等并发布到ros网络上。可通过apt安装。但是建议通过clone https://github.com/cyberbotics/webots_ros 然后重点查看src中的complete_test.cpp和robot_infomation_parser.cpp 前者是api例子,后者是程序模板。而webot.launch 教我们如何通过launch启动webot,其实是运行一个叫webot的python脚本(需要设置成可执行文件权限)。而phthon脚本通过终端命令来启动webots。然后可以向这个默认的webot.launch文件指定.wbt(世界文件),然后包含这个默认webots.launch文件来编写用户自己的文件来启动webot。
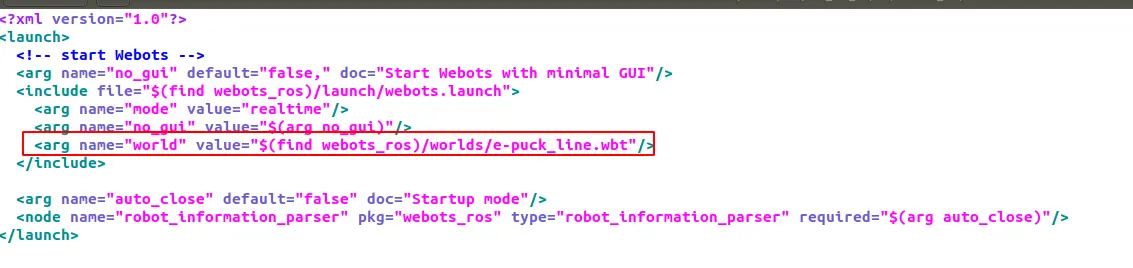
image.png
可能出现
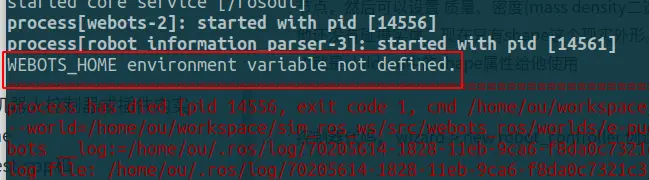
image.png
只需要export WEBOTS_HOME=~/software/webots 然后重新运行即可。
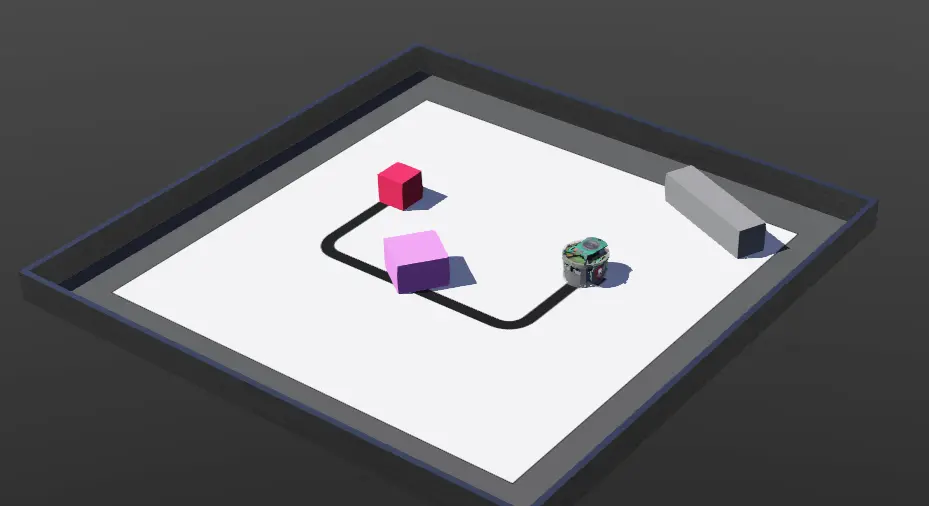
image.png
场地还是很好看的,以后可以借用一下。

启动后输入rosservice list 可以发现好多服务,可以用来获取各种信息,包括传感器,关节等。这点和gazebo_ros_control 一致。
剩下的怎么写就可以看博客的 ros通信下。包括cmakelist 源码等。代码例程也可以看webots_ros包下的实例代码`robot_infomation_parser.cpp。
比如
CMakeLists中的find_package 加入webots_ros
webots_ros发布的topic/service的名字格式为:robot_unique_name(webots模型中name字段内容+ 进程ID号 + device_name)/ service或topic_name。
而修改controllerArgs字段为 --name=myrobot_name,则可以设置robot_unique_name为一个固定的值,否则程序每次启动进程ID不同影响程序编写通用性。
以下模板不是webots 控制器的代码模板,而是webots+ros中 ros的使用代码。
模板一
#include <signal.h>
#include <locale.h>
#include "ros/ros.h"
#include <std_msgs/String.h>
#include <sensor_msgs/Image.h>
#include <sensor_msgs/LaserScan.h>
#include <sensor_msgs/NavSatFix.h>
#include <tf/transform_broadcaster.h>
#include <webots_ros/set_float.h>
#include <webots_ros/set_int.h>
#define TIME_STEP 32
#define NMOTORS 4
#define MAX_SPEED 4
ros::NodeHandle *n;
static int controllerCount;
static std::vector<std::string> controllerList;
ros::ServiceClient timeStepClient;
webots_ros::set_int timeStepSrv;
static const char *motorNames[NMOTORS] = {"wheel1", "wheel2", "wheel3", "wheel4"};
// 更新速度
void updateSpeed() {
double speeds[NMOTORS];
speeds[0] = MAX_SPEED;
speeds[1] = MAX_SPEED;
speeds[2] = MAX_SPEED;
speeds[3] = MAX_SPEED;
for (int i = 0; i < NMOTORS; ++i) {
ros::ServiceClient set_velocity_client;
webots_ros::set_float set_velocity_srv;
set_velocity_client = n->serviceClient<webots_ros::set_float>(std::string("my_robot/") + std::string(motorNames[i]) +
std::string("/set_velocity"));
set_velocity_srv.request.value = speeds[i];
set_velocity_client.call(set_velocity_srv);
}
}
// 获取可用控制器的名称
void controllerNameCallback(const std_msgs::String::ConstPtr &name) {
controllerCount++;
controllerList.push_back(name->data);
ROS_INFO("Controller #%d: %s.", controllerCount, controllerList.back().c_str());
}
//退出函数
void quit(int sig) {
ROS_INFO("终止节点运行.");
timeStepSrv.request.value = 0;
timeStepClient.call(timeStepSrv);
ros::shutdown();
exit(0);
}
int main(int argc, char **argv) {
setlocale(LC_CTYPE,"zh_CN.utf8");
ros::init(argc, argv, "my_robot", ros::init_options::AnonymousName);
n = new ros::NodeHandle;
signal(SIGINT, quit);
std::string controllerName;
/********************************************** 当作模板即可 ****************************************************/
// 订阅主题model_name以获得可用控制器列表
ros::Subscriber nameSub = n->subscribe("model_name", 100, controllerNameCallback);
while (controllerCount == 0 || controllerCount < nameSub.getNumPublishers()) {
ros::spinOnce();
ros::spinOnce();
ros::spinOnce();
}
ros::spinOnce();
// 设置基本仿真步长
timeStepClient = n->serviceClient<webots_ros::set_int>("my_robot/robot/time_step");
timeStepSrv.request.value = TIME_STEP;
// 多控制器时可选
if (controllerCount == 1){
controllerName = controllerList[0];
}
else {
int wantedController = 0;
std::cout << "选择要使用的控制器的编号 :\n";
std::cin >> wantedController;
if (1 <= wantedController && wantedController <= controllerCount)
controllerName = controllerList[wantedController - 1];
else {
ROS_ERROR("无效的控制器编号.");
return 1;
}
}
ROS_INFO("Using controller: '%s'", controllerName.c_str());
nameSub.shutdown();
/********************************************** 电机模式设置 ****************************************************/
for (int i = 0; i < NMOTORS; ++i) {
ros::ServiceClient set_position_client;
webots_ros::set_float set_position_srv;
set_position_client = n->serviceClient<webots_ros::set_float>(std::string("my_robot/") + std::string(motorNames[i]) +
std::string("/set_position"));
//设置速度模式
set_position_srv.request.value = INFINITY;
if (set_position_client.call(set_position_srv) && set_position_srv.response.success)
ROS_INFO("motor %s 工作模式为速度模式.", motorNames[i]);
else
ROS_ERROR("无法调用motor %s的set_position服务 .", motorNames[i]);
// 创建速度client
ros::ServiceClient set_velocity_client;
set_velocity_client = n->serviceClient<webots_ros::set_float>(std::string("my_robot/") + std::
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















