















































软件

产品


PDPS是Process Designer & Process Simulate的简称,它们同是西门子公司Tecnomatix下的产品。PD(Process Designer的简称),它的主要功能是数据管理与工艺规划;PS(Process Simulate的简称),它的主要功能是实现仿真验证与离线编程。仿真操作时,二者需要协同配合共同完成仿真任务。
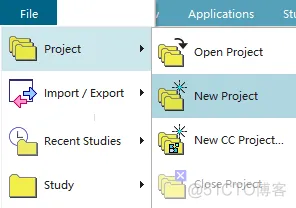
创建新项目,设定项目根目录,项目名称与根目录的命名、根目录资源文件夹结构不同的厂商会有不同的执行标准,参照执行即可。
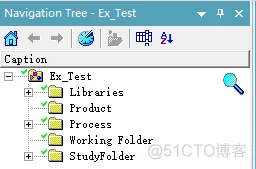
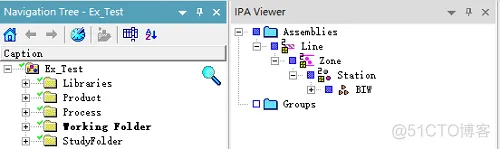
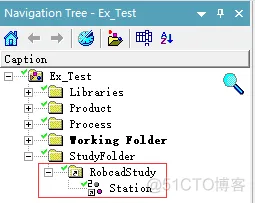
创建项目资源节点,一般情况下均包含Libraries(库文件)、Product(加工零件文件)、Process(工艺资源文件)、Working Folder(工作文件夹)、StudyFolder(程序示教文件夹)几个资源节点文件夹,当然仿真执行标准中会有对资源节点命名、目录结构的详细规定,这里暂不介绍。
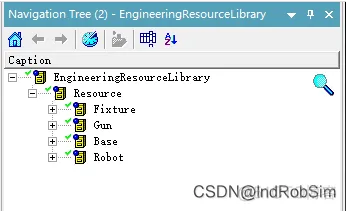
在导入仿真资源数模前需要对数模文件格式进行转换,将其全部转换为带有*.cojt壳文件的*.jt格式文件,仿真资源均以库文件形式被导入,即带有Library后缀的库文件。
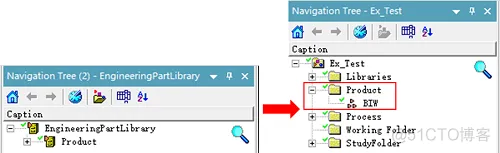
工件数模在导入之前也需要事先将其转化为带有*.cojt壳文件的*.jt格式文件,导入后的工件资源也是以库文件形式显示。导入的工件资源需要被分配到Product文件夹下创建的工件数模资源节点下,以便后期进行仿真加工应用。
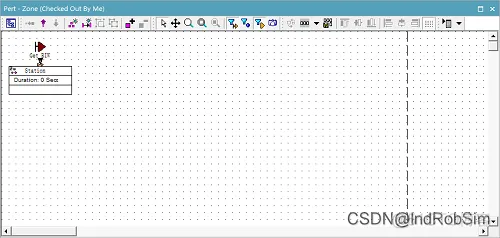
PD中机器人焊点信息通常需要从外部导入,支持导入的数据文件格式包括:*.xml、*.ppd、*.csv。其中,*.csv格式机器人焊点文件制作方法之前为大家介绍过了,这里不再赘述。导入的机器人焊点数据同样以库文件形式显示,使用是需要将其投影到焊接 板件上。
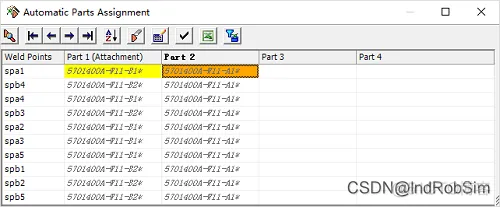
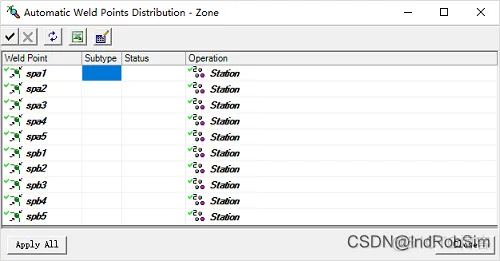
这一步骤是将导入的机器人焊点信息按照设定的距离进行搜索,然后将焊点信息自动分配到距离内搜索到的所有工件上。
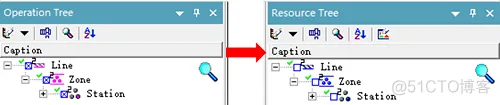
工艺文件是PD/PS软件仿真数据的关键,创建的工艺文件成对出现,粉色的工艺资源节点用以存放工艺操作信息,蓝色的工艺资源节点用以分配仿真数模资源信息。工艺资源一般按照“线体”→“区域”→“工作站”→“仿真资源(操作)”的层次结构创建。创建完成后需要对粉色工艺操作文件与蓝色工艺资源文件进行同名更新操作。
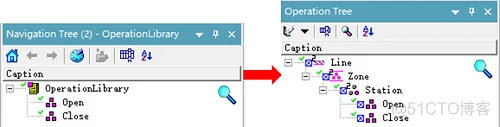
创建标准操作库,并在操作库文件资源节点下创建需要的操作,如夹具打开关闭操作、机器人焊接操作、工件移动操作等,同时为各个操作设置操作参数。
操作文件添加完成后,再将创建的各个操作按照工艺顺序依次分配到工艺操作文件中去。分配完成后在“工艺编辑”对话框中进行工艺操作编辑。
在“工艺编辑”对话框中将焊接板件按照焊接工艺顺序依次分配到各个工位中,然后工艺要求依次对区域、工位进行工艺编辑。
根据机器人初始焊接工艺规划,将焊点信息分配到相应的工位中,每个工位焊接各自的焊点,多工作协同完成加工任务。
设置工作文件夹,并在工作文件夹中创建装配树,装配树中可以显示所有的工艺流程,直到最终的加工板件为止。
在创建的蓝色工艺资源文件下的“站体”节点下创建仿真资源信息,然后将导入的仿真数模资源分配到工艺资源节点中。
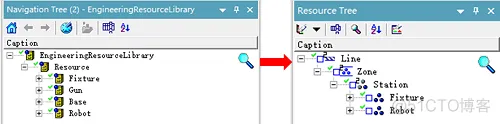
按照布局图将导入的仿真资源放置到指定的位置,当然这一步也可以在PS软件中完成。
在StudyFolder资源节点下创建机器人示教文件RobcadStudy,将工作站工艺操作文件分配到示教文件中。至此,PD软件中的仿真操作基本完成。
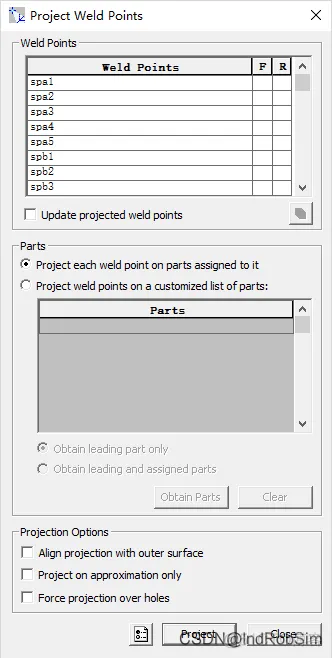
机器人焊点投影操作,本操作是将焊点信息附着到焊接板件上,并以坐标系形式显示焊点位置,且焊点坐标轴的Z轴与焊接板件的曲面垂直。对焊接板件进行移动时,附着的焊点信息将跟随板件一同移动。
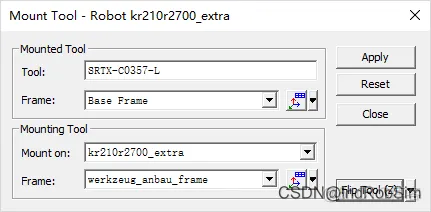
将点焊焊枪安装到对应的机器人上。
多工位连续焊接时需要对同一工件进行分身操作,即将同一个工件镜像出多个个体,每个个体可以放置到不同的工位上,以便完成加工任务。
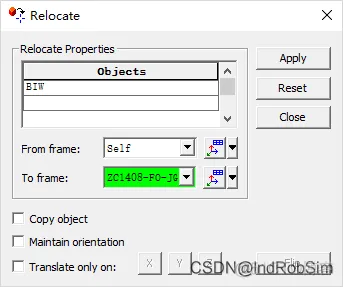
将机器人焊接板件安装到焊装夹具上,存在多个工位的需要将焊接板件分身安装到相应工位的焊装夹具上。
将每个工位需要焊接的焊点分配到机器人焊枪操作资源节点WeldOperation下。
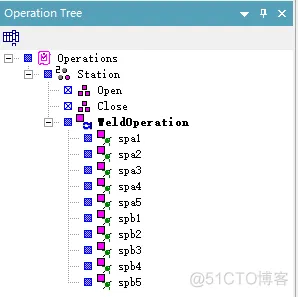
设置机器人焊枪操WeldOperation的操作工艺,并将其添加到路径编辑器(Path Editor)中,使用焊点姿态调整命令对焊点姿态进行调整,使得机器人能够实现对焊点的焊接。同时为机器人示教Home点、过度点。
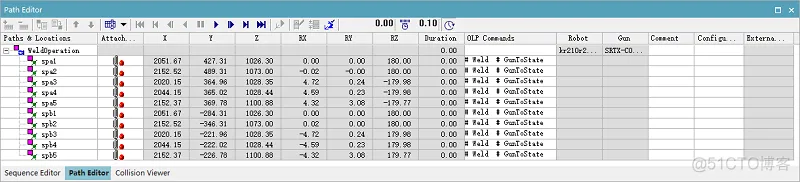
示教完成后,可以在路径编辑器(Path Editor)中进行机器人焊接操作仿真。
仿真工作站中除了机器人焊接操作以外还可以添加夹具开合状态操作、物体移动操作、人机操作等内容,这里暂不介绍。
The End
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















