















































软件

产品


模型
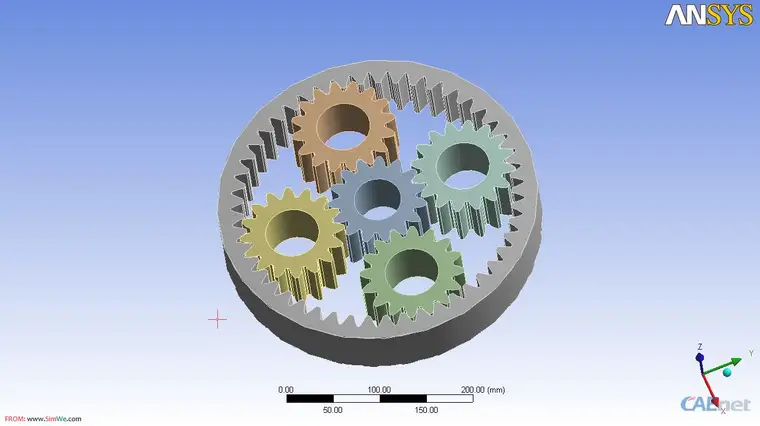
一个齿圈,一个太阳轮,四个行星轮
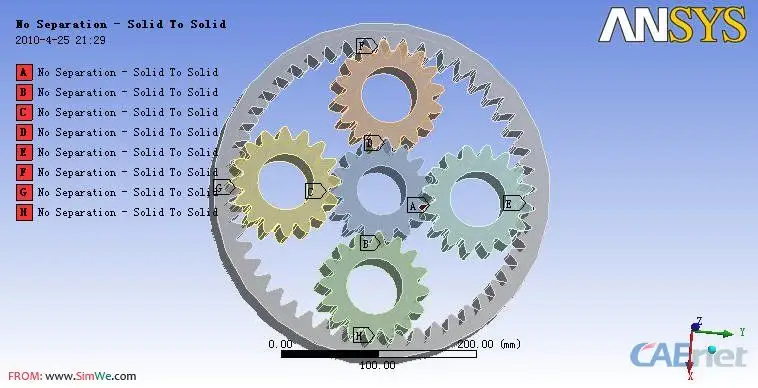
齿圈固定,太阳轮中心输入扭矩,行星轮输出接下来定义接触,假设每个齿轮都只有一对齿轮啮合,因此太阳轮和四个行星轮啮合需要四个接触对,四个行星轮与齿圈接触 需要四个接触对。注意:假设太阳轮中心输入顺时针的扭矩,那么行星轮就有逆时针转动的趋势。齿轮之间的接触采用 no separation 局限于我的计算机配置 就选用线性的接触关系大家做的时候可以按照有摩擦的来定义
接触
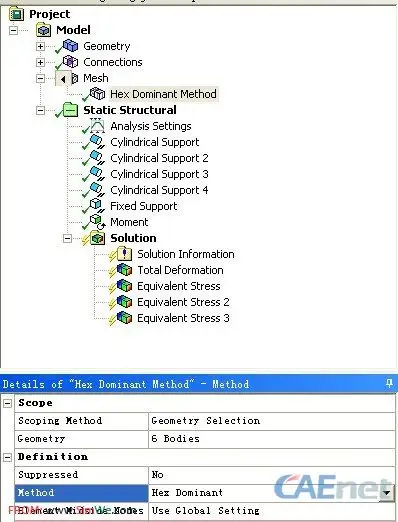
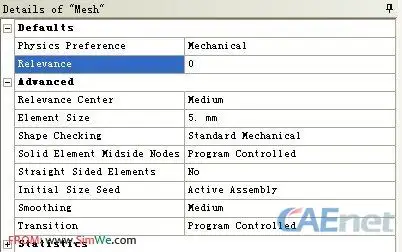
接下来划分网格尽量用六面体网 这样得到的结果准确一些在mesh里面insert method 选用Hex Dominant
网格
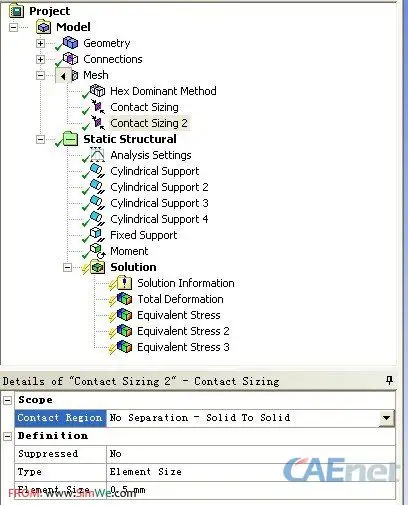
再insert 8个contact sizing,分别选择刚才定义的8个接触对,网格大小都为0.5mm
网格
最后网格整体控制为下图
网格
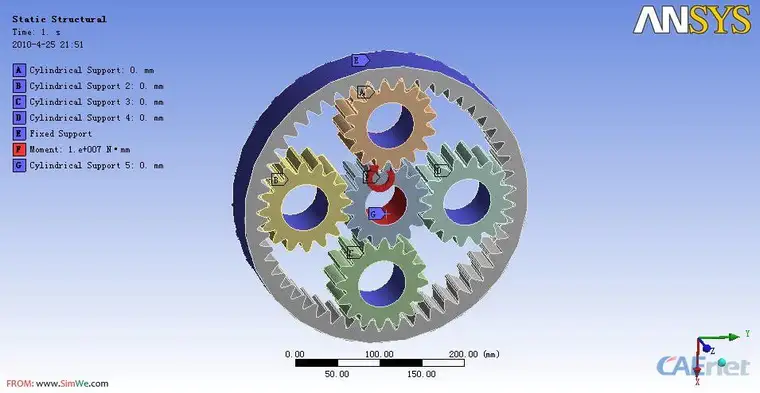
网格划分好了以后插入分析类型 static structure
1、齿圈固定,外表面定义fixed support。
2、太阳轮沿自己的轴线旋转,中心定义一个圆柱副 Cylindrical Support 径向和轴向都固定 切向方向自由。
3、行星轮既自转又公转,在中心同样定义一个圆柱副 Cylindrical Support 径向和轴向都固定 切向方向自由。
4、太阳轮中心输入扭矩 注意要和刚才定义接触对时的方向一致。
边界条件
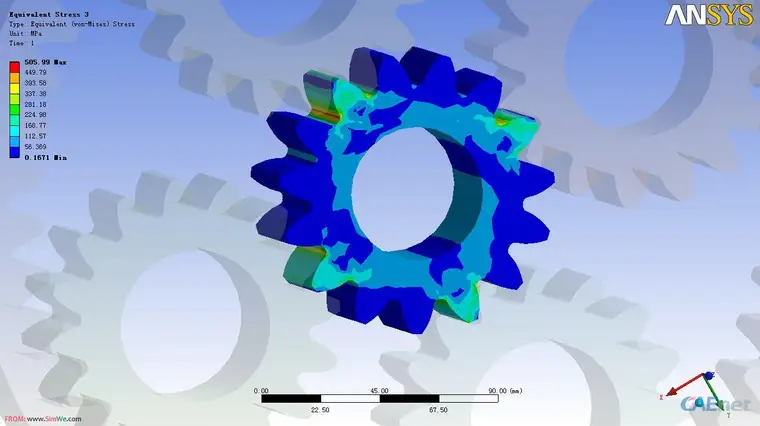
分析求解 得到变形和应力云图
太阳轮应力
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















