软件

产品


本文提出了一种在传动系统加装电控超越离合器的改进方案,可完成汽车的快速起步,缩短主离合器的滑摩过程,进而减少摩擦片的磨损。
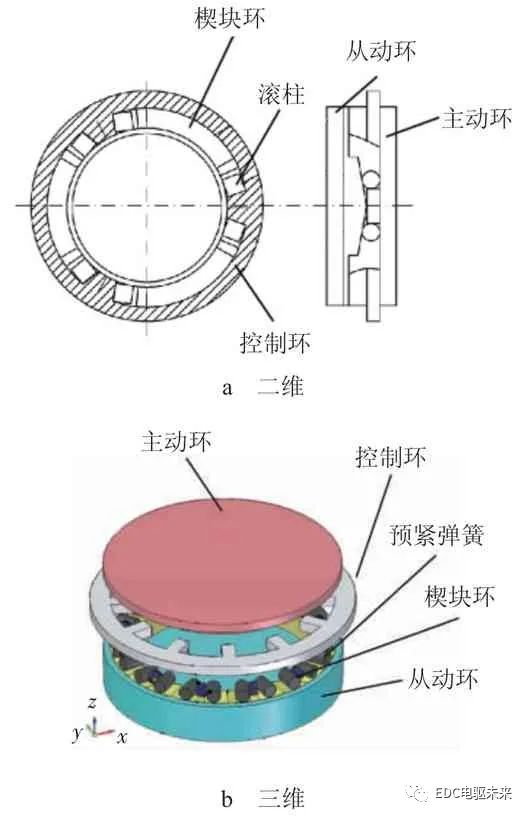
电控超越离合器的结构,如图1 所示。工作时,主从动部件依靠盘面传递扭矩。楔块环上表面为凸起的楔形对称结构,该结构使离合器能够在双向传递转矩;其下表面为平面,与从动环接触形成摩擦转矩,滚柱沿径向对称排布于楔块的斜面上,在主动环与楔块环之间传递转矩。控制环为环形多拨爪结构,工作时只与滚柱接触,拨爪拨动滚柱脱离楔角而使电控超越离合器分离。预紧弹簧为压缩弹簧,安置在2 个滚柱之间,将滚柱推向楔角的上坡面而达到预紧的作用,促使电控超越离合器快速接合。
图1 电控超越离合器结构示意图
通过改变控制环的约束方式,电控超越离合器可以选择正向单向超越、反向单向超越、双向超越以及双向楔合中的1 种工作模式进行工作。
当控制环正反双向均不受约束时,主动环经楔块环,通过两侧对称的楔块-滚柱机构在正反两向均可传递转矩,此时控制环处于自由状态,不会阻止滚柱进入由楔块环与从动环组成的楔角,电控超越离合器运行于“双向楔合”模式,相当于联轴器的作用;当控制环正反两向均受约束时,控制环将阻止滚柱进入楔角,动力在正反两向均无法传递给从动环。
从动环因不受其他构件的约束,可以自由运动,此时电控超越离合器完全分离,运行于控制分离的“双向超越”模式;而当控制环受到单向约束时,在受到约束的方向上电控超越离合器处于控制分离的超越状态,反方向上处于楔合状态,此时电控超越离合器运行于控制分离的单向超越模式,等同于典型单向离合器。电控超越离合器实物,如图2 所示。
图2 电控超越离合器实物图
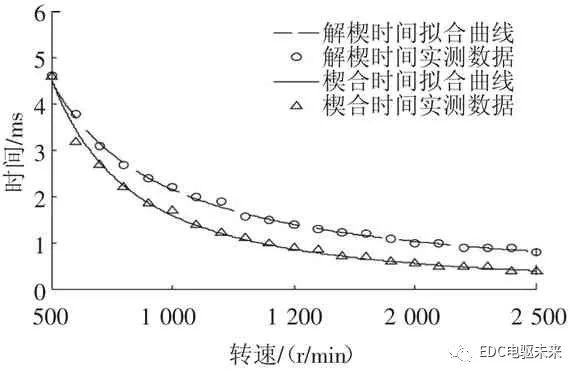
通过对电控超越离合器进行建模分析和试验研究,由试验测定的离合器楔合时间、解楔时间与转速的对应关系,如图3 所示。图3 中对应于2 000 r/min 的实测楔合时间为0.56 ms,楔合时间与空转角均略大于仿真值,考虑到实测条件的复杂性,这一差异是可以接受的。
通过比较,无论是仿真结果还是实测结果,楔合时间均小于同等工况下超越离合器的楔合时间,说明该电控超越离合器可以达到对楔合时间的设计要求。
图3 电控超越离合器楔合时间和解楔时间与转速的对应关系图
汽车的起步过程就是主离合器接合的过程,可以分为消除空行程、传递摩擦扭矩和接合后稳定运行3 个阶段。消除空行程阶段即无扭矩传递阶段,主要用于消除摩擦副之间的间隙,本研究重点考虑后2 个阶段,从离合器产生摩擦扭矩到离合器主被动端同步,终止滑摩。
起步过程的控制目标主要包含起步平顺性和离合器滑摩功。
1)平顺性指起步过程平稳、冲击小、舒适感良好,通常用冲击度j 度量:
其中:k=r/(igi0)
式中:a——汽车加速度,m/s2;
r——车轮行驶半径,m;
ig——变速箱总传动比;
i0——差速器传动比;
Tc——离合器传递扭矩,N·m;
Tr——阻力矩,N·m;
J——发动机曲轴、飞轮及离合器主动片系统的当量转动惯量,kg·m2。
2)滑摩功(W/J):离合器主从动片接合过程中有相对转动和摩擦,从而导致摩擦片温度升高,滑摩功的大小通常能体现出温度的高低、摩擦片磨损程度的大小。
式中:t0——离合器接合过程所用时间,s;
we——离合器输入轴转速,rad/s;
wc——离合器输出轴转速,rad/s。
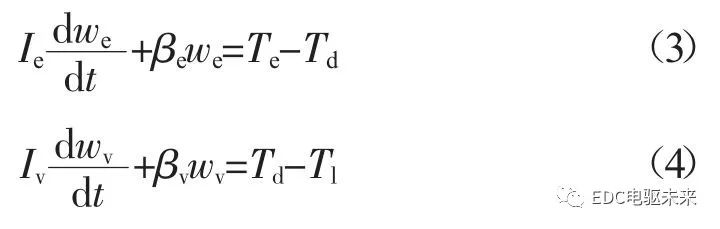
将离合器主、从动部分简化为阻尼与惯性环节,得到离合器主、从动部分结合过程的动力学方程,如式(3)和式(4)所示。
式中:Te——发动机输出转矩,N·m;
Td——主动与从动盘之间传递的摩擦扭矩,N·m;
Ie——等效至离合器主动端的转动惯量,kg·m2;
βe——离合器主动端等效阻尼系数;
Iv——离合器从动端的等效转动惯量,kg·m2;
wv——从动盘转速,rad/s;
βv——离合器从动端等效阻尼系数;
Tl——从动端等效阻力矩,N·m。
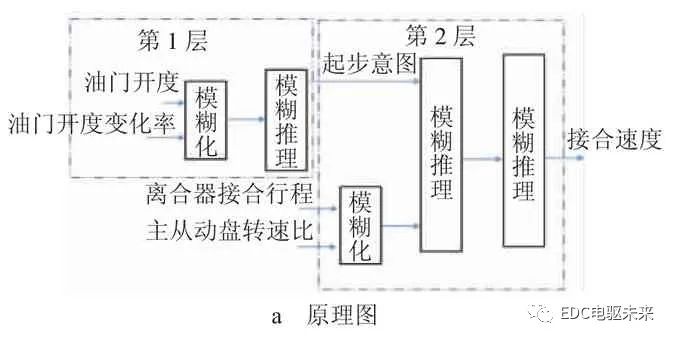
采用2 层模糊推理,第1 层根据油门开度及油门开度变化率推理出驾驶员的起步意图;第2 层根据离合器接合行程、起步意图和主从动盘转速比推理出离合器的接合速度。
1)驾驶员起步意图的模糊判断:驾驶员起步意图通常是通过油门开度和油门开度的变化率2 个信息来判断的。油门开度大,说明驾驶员急于起步;油门开度的变化率越快,说明越想较快地起步,反之,变化慢则说明起步要求较慢。
2)离合器接合速度模糊控制:在对离合器接合速度进行控制时,“快—慢—快”的接合速度是比较理想的,而针对其中“慢”的阶段,分成“慢—快—慢”的接合过程。当驾驶员起步意图较大时,表明要快速起步,反之则要慢速起步。当离合器主、从动盘转速差变大时,应慢速接合,转速差降低时,可适当增加接合速度;当转速差小于一定值时,应慢速接合。
基于MATLAB/Simulink 建立的起步过程控制模型,如图4 所示。
图4 离合器接合速度模糊控制原理与模型
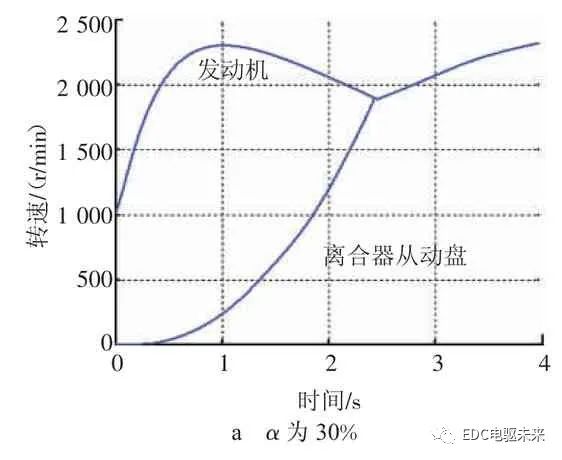
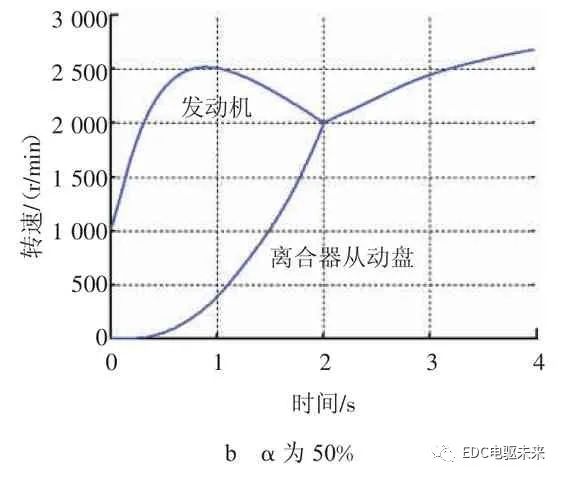
基于上述分析,进行不同油门开度下的变接合速度起步仿真。当油门开度(α)在25%~50%时,为正常起步工况;当α>50%时,汽车起步为急起步工况。分别对正常起步和快速起步2 种情况进行仿真,α 分别取值为30%和50%,离合器接合过程仿真曲线,如图5 所示。从图5 可以看出,在小油门开度下,离合器主从动盘达到同步的时间是2.4 s,在大油门开度下为2.0 s,离合器的接合速度基本按照所制定的接合速度进行,验证了模糊规则的合理性。
图5 不同油门开度下离合器接合过程仿真曲线
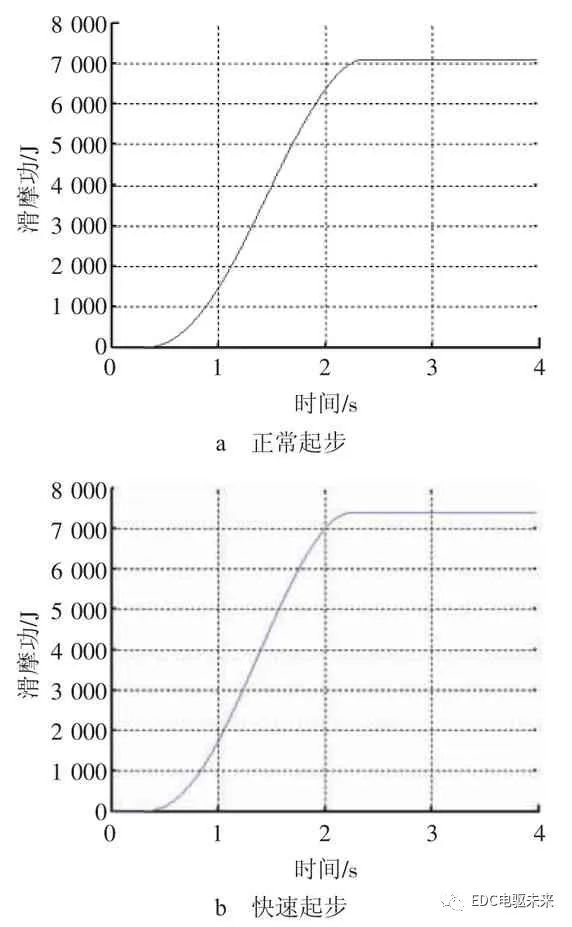
不同起步过程下的滑摩功仿真曲线对比,如图6所示。由图6 可知,缓慢起步时,离合器滑摩产生的滑摩功较小,而快速起步的滑摩功较大,因此离合器温升过高可能出现在快速起步工况,故对此工况下的离合器瞬态温度场进行仿真分析。
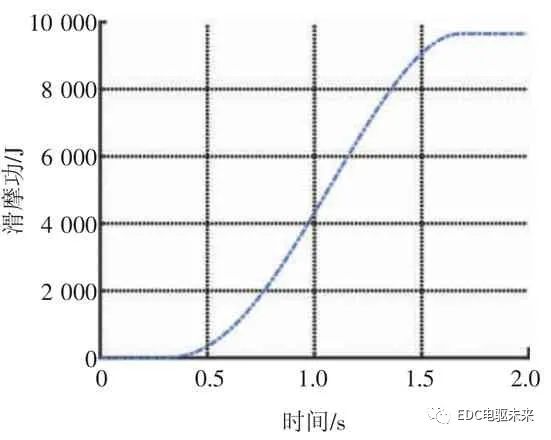
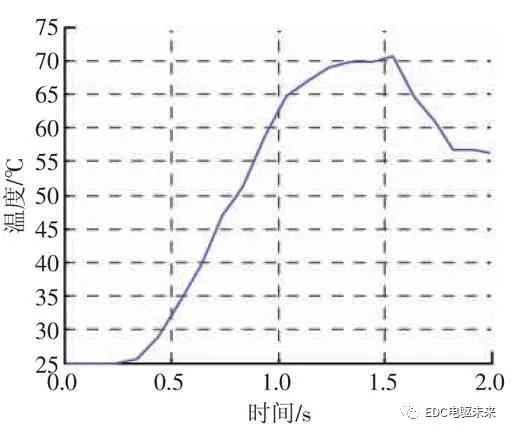
以快速起步为仿真条件,油门开度在1.5 s 后稳定在60%,求得起步过程中的滑摩功,图7 示出快速起步工况离合器滑摩功曲线,在传热学理论的基础上,建立离合器摩擦片的瞬态热传递模型,利用有限元的求解方法,根据热流密度、对流换热条件等热力学参数,得到大油门起步过程中离合器的瞬态温度场,如图8 所示。
图6 不同油门开度下滑摩功仿真曲线
图7 快速起步工况离合器滑摩功仿真曲线
图8 快速起步工况离合器温度特性分析
从图8 可以看出,起步过程刚开始时温度急速上升,原因是吸收的摩擦热量还未来得及向周围扩散,导致摩擦表面温度急剧上升。随着滑摩时间的延长,主从动转速差减小,热流密度也不断减小,对流换热不断增大,导致温度下降。当离合器连续多次进行接合后,摩擦片温度可达到100 ℃以上,这就亟需采用措施对离合器的温升进行控制。
在离合器同步阶段,汽车可以稳步加速,但此时离合器的接合压力并未达到最大,该阶段离合器的主、从动片接合不影响汽车的行驶性能,因此该阶段应以较快的速度完成。由滑摩功仿真可知,在完全接合前的一段时间内,滑摩功急剧上升,因此有必要采取相应措施降低滑摩功。
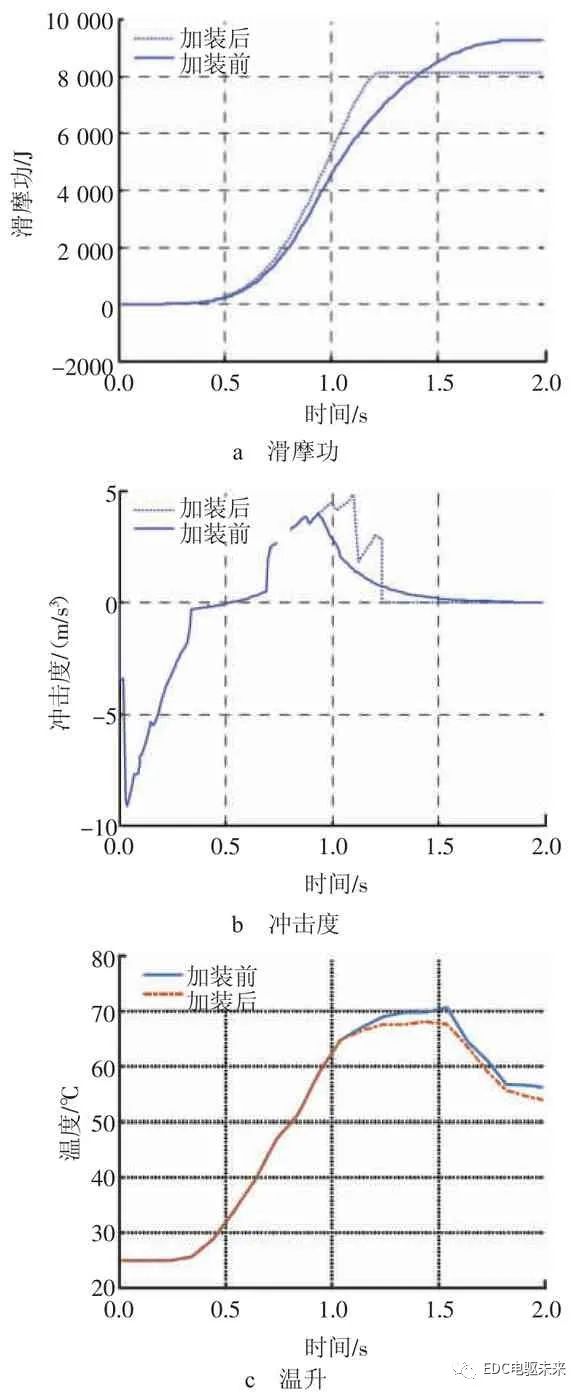
将电控超越离合器平行布置在主离合器两端,当主离合器进入同步阶段时,开始启用电控超越离合器,通过控制其控制环的位置,使其运行在双向楔合模式,从而保证主离合器前后两轴快速同步。而此时主离合器可以停止高速下的继续接合,从而减少主离合器的磨损,待电控超越离合器完成扭矩传递,主离合器温度降低后,设置较大的接合速度进行主离合器的接合。加装电控超越离合器前后的起步特性对比,如图9 所示。
图9 加装电控超越离合器前后起步特性比较
从图9 可以看出,当采用加入电控超越离合器的方案后,主离合器接合的同步阶段滑摩功和温升明显降低,而冲击度却有所上升,但是仍然低于国际标准的10 m/s3,而摩擦片的最高温度相比不加电控超越离合器时有明显降低,由此证明,通过牺牲部分冲击度指标可以实现降低温升的目标。
文章针对AMT 的起步过程进行研究,设计了适用于起步过程的多模式可控离合器,对其进行运动学仿真及样机试验,结果表明该离合器原理正确,楔合与解楔性能优异,变速器整体性能可靠。通过与传统结构AMT 起步过程的冲击度、温升进行仿真对比,新型的传动方案在降低起步过程主离合器的滑摩功和温升方面有一定的优势,本结构方案对实车的改进具有借鉴意义,后续可结合电控离合器的多模式切换与汽车运行状态进行优化控制研究,进一步改善系统性能。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020