















































软件

产品


1 简介
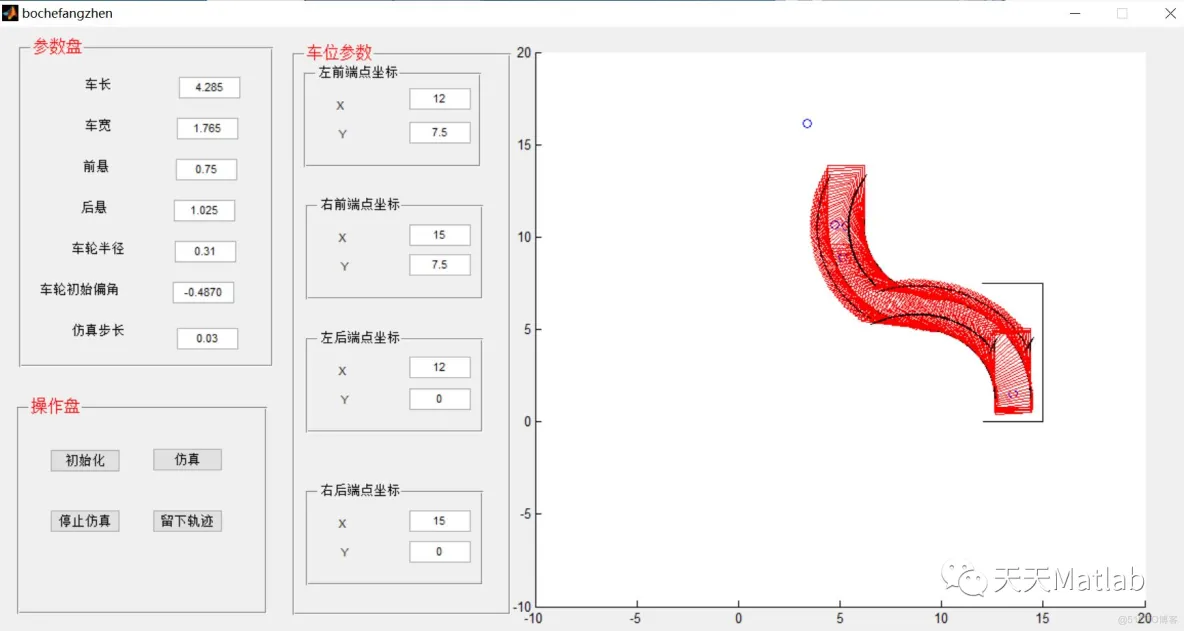
近年来,智能化的自动泊车技术不断发展.文章针对自动平行泊车轨迹曲率过大,曲率不连续和泊车起始位置,车身姿态要求较为苛刻等问题,提出了最小半径自动平行泊车方法。
function varargout = bochefangzhen(varargin)% BOCHEFANGZHEN M-file for bochefangzhen.fig% BOCHEFANGZHEN, by itself, creates a new BOCHEFANGZHEN or raises the existing% singleton*.%% H = BOCHEFANGZHEN returns the handle to a new BOCHEFANGZHEN or the handle to% the existing singleton*.%% BOCHEFANGZHEN('CALLBACK',hObject,eventData,handles,...) calls the local% function named CALLBACK in BOCHEFANGZHEN.M with the given input arguments.%% BOCHEFANGZHEN('Property','Value',...) creates a new BOCHEFANGZHEN or raises the% existing singleton*. Starting from the left, property value pairs are% applied to the GUI before bochefangzhen_OpeningFcn gets called. An% unrecognized property name or invalid value makes property application% stop. All inputs are passed to bochefangzhen_OpeningFcn via varargin.%% *See GUI Options on GUIDE's Tools menu. Choose "GUI allows only one% instance to run (singleton)".%% See also: GUIDE, GUIDATA, GUIHANDLES% Edit the above text to modify the response to help bochefangzhen% Last Modified by GUIDE v2.5 30-Aug-2010 12:37:35% Begin initialization code - DO NOT EDITgui_Singleton = 1;gui_State = struct('gui_Name', mfilename, ... 'gui_Singleton', gui_Singleton, ... 'gui_OpeningFcn', @bochefangzhen_OpeningFcn, ... 'gui_OutputFcn', @bochefangzhen_OutputFcn, ... 'gui_LayoutFcn', [] , ... 'gui_Callback', []);if nargin && ischar(varargin{1}) gui_State.gui_Callback = str2func(varargin{1});endif nargout [varargout{1:nargout}] = gui_mainfcn(gui_State, varargin{:});else gui_mainfcn(gui_State, varargin{:});end% End initialization code - DO NOT EDIT% --- Executes just before bochefangzhen is made visible.function bochefangzhen_OpeningFcn(hObject, eventdata, handles, varargin)% This function has no output args, see OutputFcn.% hObject handle to figure% eventdata reserved - to be defined in a future version of MATLAB% handles structure with handles and user data (see GUIDATA)% varargin command line arguments to bochefangzhen (see VARARGIN)% Choose default command line output for bochefangzhenhandles.output = hObject;% Update handles structureguidata(hObject, handles);% UIWAIT makes bochefangzhen wait for user response (see UIRESUME)% uiwait(handles.figure1);% --- Outputs from this function are returned to the command line.function varargout = bochefangzhen_OutputFcn(hObject, eventdata, handles) % varargout cell array for returning output args (see VARARGOUT);% hObject handle to figure% eventdata reserved - to be defined in a future version of MATLAB% handles structure with handles and user data (see GUIDATA)% Get default command line output from handles structurevarargout{1} = handles.output;% --- Executes on button press in pushbutton1.function pushbutton1_Callback(hObject, eventdata, handles)global long;% 使这个变量变成全局变量global width;% 使这个变量变成全局变量global qianxuan;% 使这个变量变成全局变量global houxuan;% 使这个变量变成全局变量global lunjin;% 使这个变量变成全局变量global fai;% 使这个变量变成全局变量global x6;% 使这个变量变成全局变量global y6;% 使这个变量变成全局变量global x7;% 使这个变量变成全局变量global y7;% 使这个变量变成全局变量global x8;% 使这个变量变成全局变量global y8;% 使这个变量变成全局变量global x9;% 使这个变量变成全局变量global y9;% 使这个变量变成全局变量global ds;% 使这个变量变成全局变量global r;% 使这个变量变成全局变量global xd;% 使这个变量变成全局变量global yd;% 使这个变量变成全局变量axis([-10,20,-10,20]);axis manual;hold on;%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%参数集,这里存放的为车辆与车位已经仿真所需的主要参数%手动输入参数集long=str2double(get(handles.edit1,'string'));width=str2double(get(handles.edit2,'string'));qianxuan=str2double(get(handles.edit3,'string'));houxuan=str2double(get(handles.edit4,'string'));lunjin=str2double(get(handles.edit5,'string'));fai=str2double(get(handles.edit6,'string'));x6=str2double(get(handles.edit7,'string'));y6=str2double(get(handles.edit8,'string'));x7=str2double(get(handles.edit9,'string'));y7=str2double(get(handles.edit10,'string'));x9=str2double(get(handles.edit11,'string'));y9=str2double(get(handles.edit12,'string'));x8=str2double(get(handles.edit13,'string'));y8=str2double(get(handles.edit14,'string'));ds=str2double(get(handles.edit15,'string'));% long=6;%long 为车车长% width=3;%width 为车宽% qianxuan=1;%qianxuan 为车前悬长度% houxuan=1;% houxuan 为车后悬长度% lunjin=0.3;%lunjin为车轮半径% fai=-(pi)/5;%fai 为前一段轨迹的车前轮偏角% % % x6=11;% y6=15;% x7=18;% y7=15;% x8=18;% y8=0;% x9=11;% y9=0; % % ds=0.3; %仿真步长%自动生成参数集r=(long-qianxuan-houxuan)/abs(tan(fai));% 车辆的后轴中心点转弯半径%theta0=(pi)/2;%theta0为起始点车身偏角xd=(x8+x9)/2;%终点坐标yd=(y8+y9)/2+1.5;h0=plot(xd,yd,'bo');%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%1.2.3.4.5.6.7.8.9.10.11.12.13.14.15.16.17.18.19.20.21.22.23.24.25.26.27.28.29.30.31.32.33.34.35.36.37.38.39.40.41.42.43.44.45.46.47.48.49.50.51.52.53.54.55.56.57.58.59.60.61.62.63.64.65.66.67.68.69.70.71.72.73.74.75.76.77.78.79.80.81.82.83.84.85.86.87.88.89.90.91.92.93.94.95.96.97.98.99.100.101.102.103.104.105.106.107.108.109.110.111.112.113.114.115.116.117.118.119.120.121.122.123.124.125.126.127.
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















