软件

产品


一般模态分析时,在有限元软件Patran&Nastran选择的是Normal Mode(实模态)求解器,而进行转子的临界转速分析时却要求选择Complex Mode(复模态)求解器。实模态和复模态有什么不同?这里不做过多的解释,只介绍简单的概念。
一般物理系统的自由振动方程为
其中,[M]、[C]和[K]分别表示质量矩阵、阻尼矩阵和刚度矩阵。
模态分析本质上就是需要对上述方程进行特征值求解。一般情况下,阻尼对模态分析结果的影响不大,在进行模态分析时会忽略阻尼的影响,所以上述一般物理系统的自由振动方程为
对于方程(1),在Matlab中需要先对方程(1)进行降阶,再进行特征值求解;对于方程(2),在Matlab中是可以直接进行特征值求解的。
转子系统的自由振动方程为(忽略阻尼)
其中,[G]为回转矩阵,是一个反对称矩阵,且主对角元素为0。因为转子临界转速分析时要考虑陀螺力矩的影响,所以转子自由振动方程中包含有回转矩阵。显然,方程(3)与方程(1)在形式上类似,使用Matlab进行特征值分析时,需要先降阶再求解。
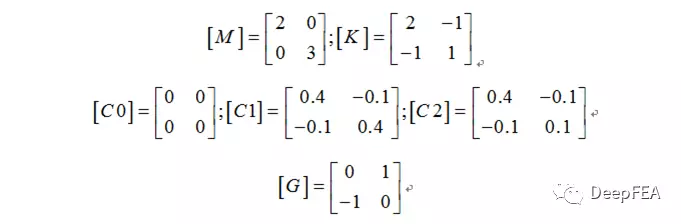
下面给出一个简单例子,以帮助理解这些情况。定义如下矩阵:
1.考虑无阻尼的情况
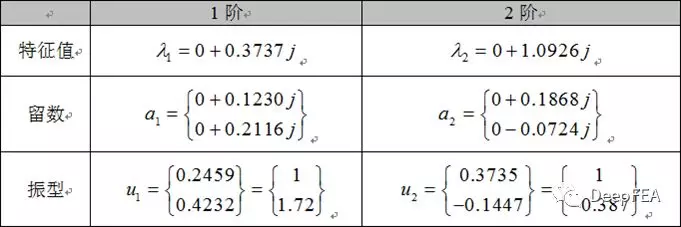
考虑质量矩阵[M]、刚度矩阵[K]和阻尼矩阵[C0],由这组矩阵的特征值求解产生的特征值、留数和振型为
2.考虑比例阻尼
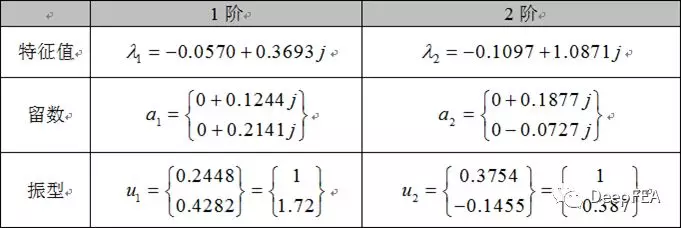
比例阻尼,即阻尼与系统的质量和/或刚度成比例。考虑质量矩阵[M]、刚度矩阵[K]和阻尼矩阵[C1],由这组矩阵的特征值求解产生的特征值、留数和振型为
注意到这组特征值求解得出的模态振型与无阻尼的情况相同,这是因为阻尼与系统的质量和/或刚度成比例。上述两种情况产生的模态称为“实模态”。显然,无阻尼和比例阻尼计算出的模态振型完全相同。
3.考虑非比例阻尼
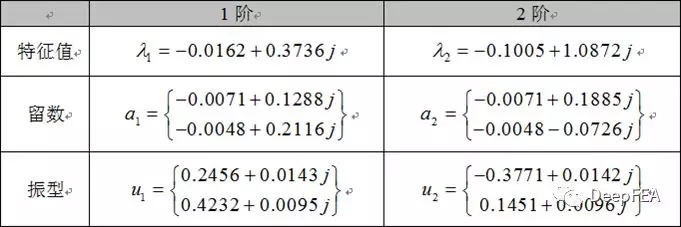
非比例阻尼不与系统的质量和/或刚度成比例。考虑质量矩阵[M]、刚度矩阵[K]和阻尼矩阵[C1],由这组矩阵的特征值求解产生的特征值、留数和振型为
对于这种情况,模态振型不同于前面的两种情况。首先,模态振型是复数值。仔细检查这些振型,可以看出每阶模态的各个自由度之间的相对相位关系已不再是完全同相位或反相位了。这种情况下产生的模态称为“复模态”。这跟前面两种情况大不相同。系统阻尼与系统的质量和/或刚度不相关时,得出的模态就为复模态,此时的阻尼称为非比例阻尼。
实模态的一些特征:
1)通过驻波描述模态振型,而这些驻波的节点位置是固定不动的;
2)所有点同一时刻通过它们的极大和极小位置处;
3)所有点同一时刻通过零点位置;
4)模态振型为带符号的实数值;
5)结构上所有点同任何其他点,要么完全同相位,要么完全反相位;
6)无阻尼得到的模态振型与比例阻尼得到的模态振型相同,这些振型解耦质量、阻尼和刚度矩阵。
复模态的一些特征:
1)通过行波描述模态振型,节点似乎在结构上移动;
2)所有点不在同一时刻通过它们的极大值位置处,其中有一些点似乎落后其它点;
3)所有点不在同一时刻通过零点位置;
4)模态振型不能用实数描述,为复数;
5)不同自由度之间相位关系一般,没有完全同相位或者完全180度反相关系;
6)由无阻尼情况得到的模态振型将不能解耦阻尼矩阵。
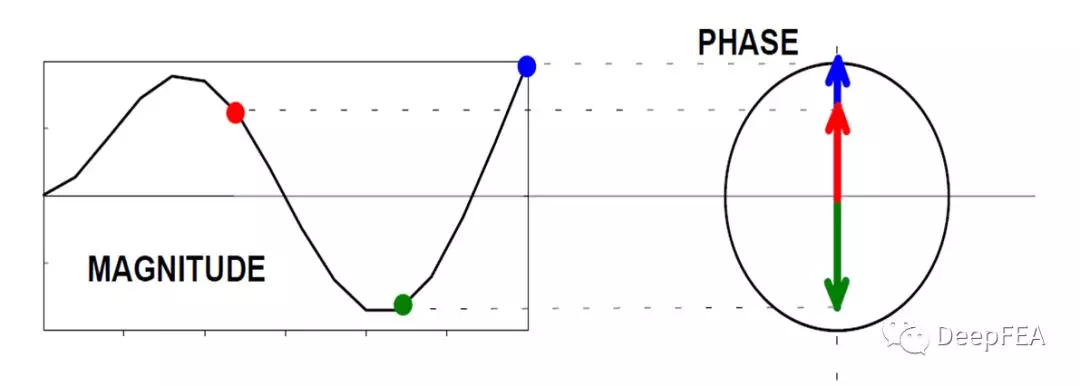
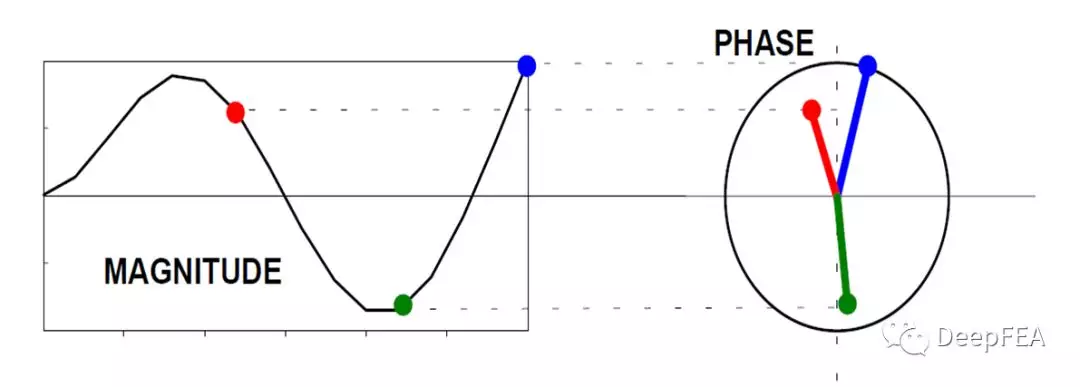
为了更加形象地描述这些特征,给出了悬臂梁某阶模态所对应的实模态振型和复模态振型。图1为实模态,自由度之间的相对相位关系完全同相位(如图中蓝色和红色表示的自由度,0度)或者完全反相位(如图中的绿色表示的与蓝色和红色表示的自由度,180度)。而复模态不具有这种简单的相位关系,模态振型必须通过幅值与相位或者实部与虚部两者同时描述,如图2所示。
图1 实模态示意图
图2 复模态示意图
4.考虑回转矩阵(反对称矩阵)
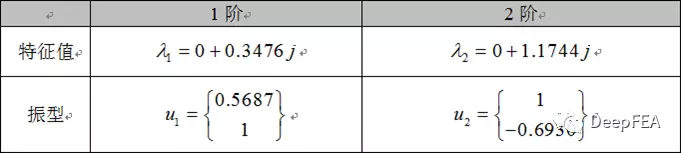
考虑质量矩阵[M]、刚度矩阵[K]和回转矩阵[G],由这组矩阵的Matlab特征值求解产生的特征值和振型为
注意到这组特征值求解得出的模态振型与无阻尼的情况在形式上是类似的。考虑陀螺力矩(回转矩阵)时,转子系统在主振动中:1)各圆盘中心的轨迹是圆;2)表示各圆盘中心位移的复数向量都是同相或反相的,即轴线弯曲成一平面曲线。对于某阶主振动,轴线或圆盘中心的轨迹如图3所示。

免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020