















































软件

产品


一、背景
滚压矫直在成型工艺中转矩重要地位,在LSDYNA中如何进行滚压矫直分析是一大难点,多个刚体滚子如何绕着各自质心旋转以及工件与滚子接触如何设置都是难点。
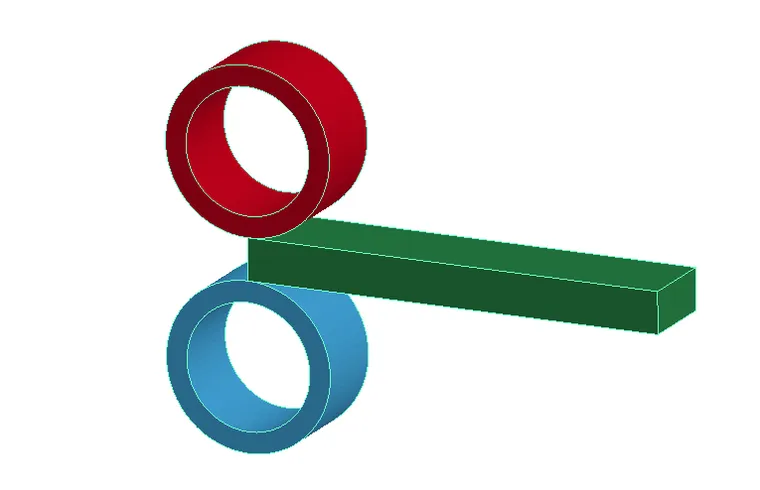
二、几何模型
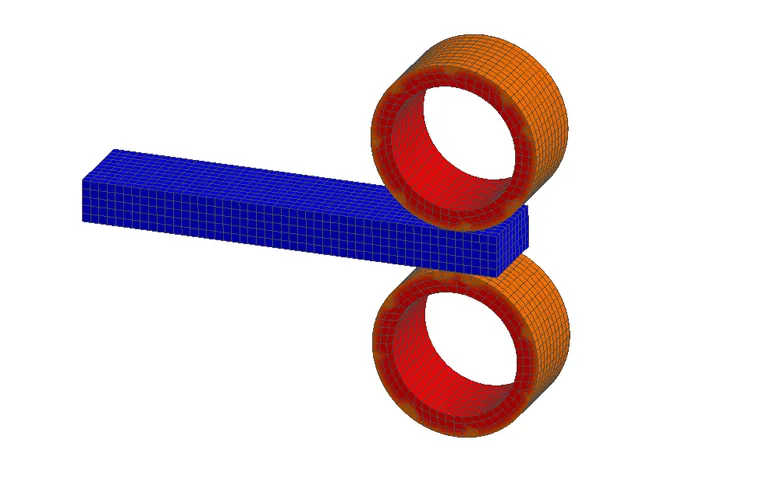
利用wb的dm建立滚子及工件的实体模型,滚子有2个,本文为测试案例,因此只有2个棍子,实际滚压矫正工艺中一般有8-9个棍子,模型如下图所示。
三、材料及刚体局部坐标系
棍子为刚体,采用rigid本构;为了让滚子能绕着各自的旋转中心旋转,需要分别设置2个刚体滚子的的局部坐标系,如下所示:
*MAT_RIGID
1 0.780E+04 0.210E+12 0.300000 0.0 0.0 0.0
-1.00 1.00 111110
*DEFINE_COORDINATE_SYSTEM
$ 1CID 2XO 3YO 4ZO 5XL 6YL 7ZL
1,0,0.25,0,1,0.25,0
$ 1XP 2YP 3ZP
0,1.25,0
$
*DEFINE_COORDINATE_SYSTEM
$ 1CID 2XO 3YO 4ZO 5XL 6YL 7ZL
2,0,-0.25,0,1,-0.25,0
$ 1XP 2YP 3ZP
0,0.75,0
$
工件采用24号材料本构。
*MAT_PLASTIC_KINEMATIC
3 0.270E+04 0.740 0.350000 0.100E+09 0.200E-01 0.00
0.00 0.00 0.00
$
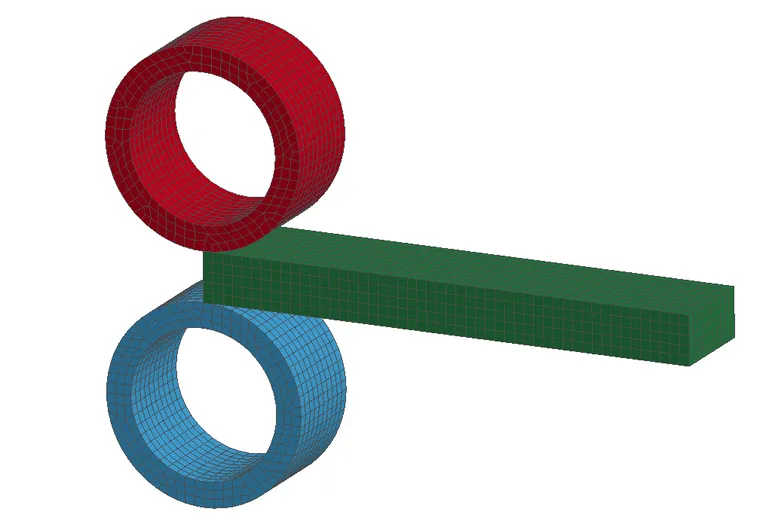
四、单元及有限元网格
全部采用lagrange算法。
*SECTION_SOLID
1 1
网格如下图所示:
五、部件part
部件1和2为滚子,部件3为工件
*PART
Part 1 for Mat 1 and Elem Type 1
1 1 1 0 0 0 0
$
*PART
Part 2 for Mat 2 and Elem Type 1
2 1 2 0 0 0 0
$
*PART
Part 3 for Mat 3 and Elem Type 1
3 1 3 0 0 0 0
六、接触建立
滚子与工件间采用自动面面接触。
*CONTACT_AUTOMATIC_SURFACE_TO_SURFACE
3 1 3 3 0 0 0 0
0.1000 0.8000E-01 0.000 0.000 0.000 0 0.000 0.1000E+08
1.000 1.000 0.000 0.000 1.000 1.000 1.000 1.000
*CONTACT_AUTOMATIC_SURFACE_TO_SURFACE
3 2 3 3 0 0 0 0
0.1000 0.8000E-01 0.000 0.000 0.000 0 0.000 0.1000E+08
1.000 1.000 0.000 0.000 1.000 1.000 1.000 1.000
七、边界及载荷
工件通过BOUNDARY_PRESCRIBED_MOTION施加平动位移。
*BOUNDARY_PRESCRIBED_MOTION_SET
1 1 2 1 1.000 0 0.000 0.000
*DEFINE_CURVE
1 0 1.000 1.000 0.000 0.000
0.000000000000E+00 0.000000000000E+00
1.000000000000E+00 -2.000000000000E+00
八、求解设置
计算时间1us,时间步因子0.1;
*CON*TROL_TIMESTEP
0.0000 0.1000 0 0.00 0.00
*CON*T*ROL_TERMINATION
1.00 0 0.00000 0.00000 0.00000
九、求解
6核cpu求解时间1min。
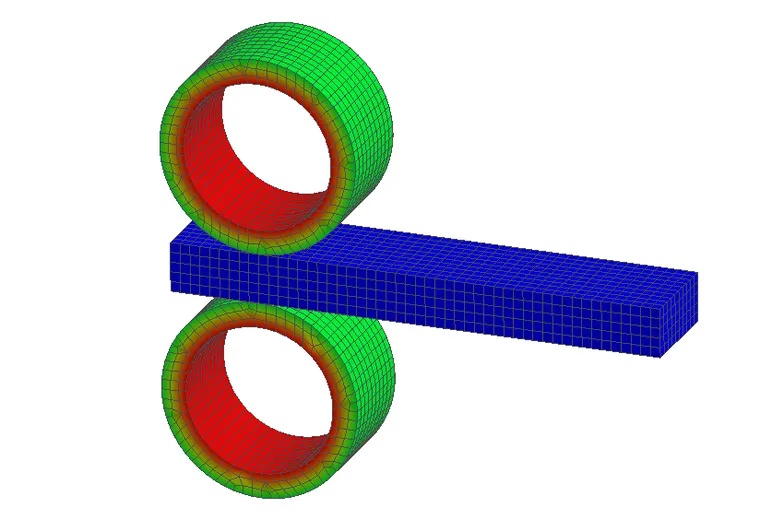
十、结果分析
结果如下图所示,本文主要研究滚压矫直的方法与技巧,模型较为简易。

免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















