















































软件

产品


静液压泵在当今的汽车技术中无所不在,在发动机、变速箱或转向系统中维持供油。观察到输油量增加的趋势时,空化的物理现象就会对泵的抽吸流量设定一个自然的极限,这个流量极限的预测对汽车供应商行业是一个挑战。
本文主要研究叶片泵内空化受限流动的数值模拟方法。通过一个2D可行性研究,论证了非定常可压缩流动、动网格和利用FLUENT中的空化模型等多种CFD技术的结合。对3D水力模拟的发展进行了研究,并讨论了3D液压模拟与1D液压模拟的关联。
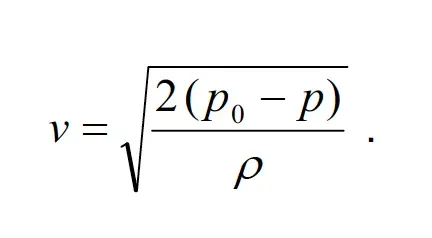
静液压泵是容积泵。泵运行时要抵抗液压阻力(即流体消耗装置),会使用几何位移原理将流体从低压级(泵的吸入侧)输送到高压级(泵的压力侧)。泵的基本部件由几个腔室或叶片单元组成,这些腔室或叶片单元通过机械连接在一个旋转轴上,并在旋转轴旋转的同时周期性地改变其体积。流体输运的整个过程对于每个腔室来说都可以看作是一个热力循环。在下文中,我们会假定工作介质是密度为U的几乎不可压缩的液体。在吸入侧,腔室通过开口孔与泵的吸入通道接触。在腔体体积膨胀的同时,腔体内的压力略有下降。这就产生一个压力梯度,该压力梯度引起一个流场,该流场用液体填充腔室。同时避免了腔室中出现进一步压降。在准稳态条件下,由伯努利方程(Bernoulli’s equation)可以很容易地推导出进入室内流体的速度v与吸气通道内压力p0与室压p之间的压降∆p=p0-p之间的关系式:等式(1)
假设横截面A通常是由时间决定的,进入腔内的体积流量为vA。在单元完全充满的情况下,体积流量vA精确地补偿了单元的体积变化率,等式(2):

体积变化率的阶为Vmaxn,其中n表示泵速度(通常以每分钟转数-rpm测量),Vmax是最大单元体积。结合等式(1,2)我们可以得出,根据平方,随着泵转速n的增加,室压p减小。在某个临界泵速下,单元压力变为零。由于液体不承受正应力(或等效的负压力),等式(1,2)在较高的泵速度下不再有效。相反地,液体的反应是形成空洞和气泡。来自等式(1)的临界速度
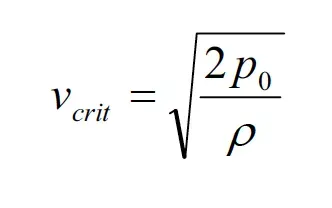
是通过设置p等于零得出的。一旦流动达到接近该数值的速度,就会发生空化现象,失去不可压缩性和准平稳性,流动条件进入高度可压缩和瞬态状态。对于密度ρ=0.85 g/cm3且p0=1 bar的液压油(吸气通道无液压损失的理想情况),可得出vcrit=15.3 m/s。
假设有z个排量单位,只要泵速度保持在临界或特征值以下,泵的时间平均质量流量则为pzVmaxn。远远超过这个值,泵的质量流量将在有限的流速下饱和。在泵的设计过程中,当泵的流量基本上偏离其理论值pzVmaxn时,要着重注意泵的特征转速。这个问题的复杂性比(上面提到的)简单公式的算法要大得多,因为在空化流中发生了相当复杂的物理过程,比如溶解气体的蒸发、再冷凝和出气。因此,估算泵的特性转速对计算工程是一个真正的挑战。
当腔室达到其最大容积时,腔室与泵的吸入侧和压力侧分离,也就是说,腔室既不与吸入通道接触,也不与压力通道接触(如果忽略任何泄漏间隙的话)。这导致流体的限制和低压区和高压区的几何分离,这是所有静液压泵的主要特征,同时也是与诸如水轮机之类的流体动力泵的主要区别。
注意,直接在室内限制阶段之后,腔室会再次通过另一个开口几何截面与压力侧接触。腔室的容积再次减小,容纳的流体被排入压力通道。
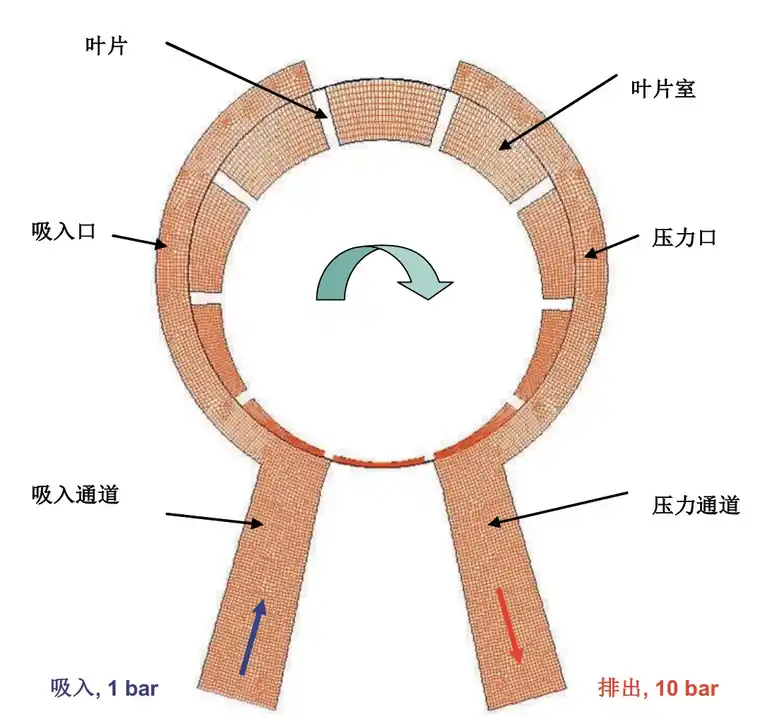
这种泵的原理可以以不同的方式实现。最熟悉的可能是一种活塞泵设计。另一种可能的构造原理是叶片泵。叶片泵的功能在图4中显示。叶片将定子和转子之间的容积分成若干个容积室,这些容积室的容积随着泵的角度的变化而周期性地变化。
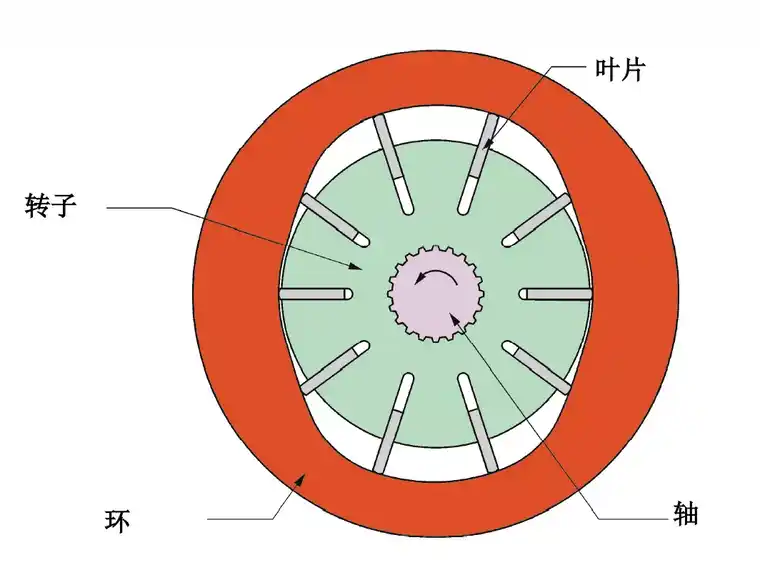
图4:叶片泵的功能说明
作为示例,每个泵循环具有两个位移的转子单元。叶片可以在其狭缝中自由运动,并将定子(环)和转子之间的容积分成若干个腔室。
在过去的产品设计过程中主要依赖于经验数据,而仿真已经成为设计过程中的重要元素。为了获得关于实验的系统必要知识而专门使用大量的原型进行实验非常地耗时耗力。许多方面可以而且必须在仿真的虚拟层次上进行。因此,在模拟、实验和分析之间遵循一个很好的平衡策略是很重要的。模拟可能是非常耗时的,因此必须注意,投入不要过量。当然,数值实验通常比实际硬件上的测量要便宜得多。此外,仿真技术现在变得越来越强大,应用范围也得到了很大的扩展。需要注意的是,只要不可能从这些数据(数值或经验数据)导出简单的模型和视图,数值数据就可能和经验数据一样无用。
确定静液压泵流量极限已被证明是关键一步。在产品设计过程中,开发工程师需要一种简单、快速的计算工具来进行纯估算。1D建模是满足这一需求的最有效方法。1D模型具有有限的变量数目,并允许进行详细的分析。量纲分析可以用来获得一个问题的规则参数。计算流体力学(CFD)在模型参数确定或模型改进时起到了很好的支持作用。在这种情况下,流量系数是一个非常突出的例子。因此,人最终可以得出一个很好的模型,该模型可以用完全开发的产品的可用实验数据来验证。在产品设计的下一个周期中应用该模型可能有助于避免以前的缺点。因此,我们尝试在这个卓有成效的共生体中采用1D模拟和CFD并行的策略。
在尝试用CFD进行全3D叶片泵模拟之前,建议从2D可行性研究开始。原因在于FLUENT中的空化模型可能导致求解器的严重收敛问题,这需要长期手动调整求解器的设置。根据我们的经验,这种情况发生在静止的3D流中。此外,叶片泵的全面模拟需要FLUENT中提供的几种模拟技术的组合。首先,我们有一个非定常流动问题。正如我们在第1节中所看到的,静液压泵的工作方式是显式变化的几何形状。运动部件的运动不是像涡轮机那样由纯粹的旋转组成的。因此,不存在运动参考系,其中运动部件处于静止状态。动态网格技术的应用是十分必要的。最后,在所注意的泵速度下,工作介质是处于高度可压缩状态的流体。
2D模拟可进行各种实验可能性,而不会占用太多CPU时间。总之,从2D模型开始似乎是在模型建立的早期阶段克服最终问题的最佳选择。
每个泵循环的一个排量的径向填充叶片泵的2D CFD模型。网格仅是四边形形状,在叶片单元区域采用“map”算法,在定子部分采用“pave”算法(网格单元总数:9549)生成。边界条件分别用蓝色和红色表示吸力侧和压力侧。
图5显示了一个径向填充叶片泵的简单几何形状,每个泵循环有一个排量。几何形状的选择使得它可以很容易地在GAMBIT中生成。位移体积是利用两个偏心圆来实现的。在这两个轮廓之间的空间会被叶片分割成室,用极坐标表示的叶片的边界只是恒定角度的直线。其几何结构由两部分组成:一个几何结构不随时间变化的定子,即具有径向吸气和压力端口的吸气和压力通道;一个由腔室或叶片单元组成的运动和变形部分。两部分通过非共形接口连接。此外,在界面的定子侧,有一层薄的网格单元,它连接几何形状的吸力侧和压力侧,以保持其连通性(在每个时间步必须有一条从“入口”到“出口”的路径)。不好的是,这不可避免地会导致模型中的人为泄漏。图2所示的几何形状已用于FLUENT的模型设置中。
网格运动由用户自定义的函数(UDF)使用动态网格宏DEFINE_GRID_MOTION()定义的。这个UDF使用一个简单的映射来单独移动叶片单元区域的每个节点:每个节点可以被视为位于曲线上的一个点。使用极坐标(r, ψ ),内轮廓由转子半径r = R = const简单定义。环的轮廓由径向位置r=R+h(ψ)定义,其中h(φ)表示作为角坐标ψ的函数的位移曲线。曲线族现在可以定义为等式(4)
其中参数α∈[0,1]列举族中的单个成员。给定节点的值不随时间变化。换句话说,α对每个节点起到拉格朗日坐标的作用(类似于连续介质力学的拉格朗日表示)。因此,对于给定的转子的实际角速度ω=2πn(具有以rpm为单位的n个泵速度),从时间t到时间t+∆t的更新通过映射M进行,等式(5)

由于FLUENT使用笛卡尔坐标(x,y),新节点位置(x',y')通过一系列坐标变换获得:等式(6)

借助于等式(4)中给出的关系式进行(r, ψ)→(ψ, α)的变换。等式(6)唯一地定义了网格到自身的自相似映射。
数值模拟是采用FLUENT 6.2版的上述动网格技术和FLUENT的空化模型进行的。为了简单化,没有采用湍流模型,即忽略了网格未解的流动结构和涡流。在第一步中,应用稳态解算器以获得合适的初始条件。在非稳态模式下,泵转速在前几个泵循环期间绝热开启,因为使用了边界条件压力入口/出口条件。压力-速度耦合采用SIMPLE算法。所有松弛因子都被设定为0.2-0.3。与利用空化模型的定常流模拟不同,我们进行的非定常流模拟几乎没有出现任何收敛问题(如果在能接收的误差内的演化过程中忽略未预见的解算器发散)。这大概是物理上的原因:空化是一种瞬态现象。因此,不稳定的模拟更有可能成功。图9给出了一个典型的数值结果,它显示了当泵流达到准稳态时密度分布的快照。图中是密度为850 kg/m³的液体、质量分数为10-5级的未溶解空气的混合物。

密度等值线图(单位:kg/m³)。泵在4000 rpm泵速时已达到准静止状态。我们可以清楚地看到低密度的腔室。腔室发展最快,而叶片单元以其最大速率膨胀。正是在最后一个阶段,当膨胀已经再次减慢,室开始与吸力侧分离时,室充满了液体。
在液压技术中,用一组常微分方程来描述流体技术系统是常见的。这是由连续介质方程通过积分质量和动量的微分平衡方程在某些指定控制体积上得出的。在此积分公式中,质量和流体速度的空间分布被平均体积和平均面值所代替。从而将连续介质力学问题归结为一个离散模型。与CFD(它也是原始场理论流问题的离散表示)不同,简化模型只有很少的自由度,因为任何保持有限空间分辨率的尝试都省略了。因此,“1D”一词在某种意义上具有误导性。我们可以说是零维模型,因为它不再涉及偏微分方程。然而,在通常的说法中,这样的模型被称为1D模型,是因为可以通过串行连接许多基本组件(体积、管道、孔口等)来建立大型系统,从而获得1D信号路径。
在叶片泵单元的填充率问题中,唯一关心的平衡是单个叶片泵单元的质量平衡。借助于中值定理和正压状态方程ρ=ρ(p),质量平衡的积分形式可以重新表述为室压p的常微分方程:(等式7)
在液压技术的语言中,体积V被称为液压节点;Ch表示液压节点的所谓液压容量。由于液相热容大,流动输运可视为等温的。通常,液压理论处理的是密度和密度比近似恒定的低压缩液体,并且在等式 (7) 中出现的密度比被设置为等于1。在我们的实验中,由于流场的强非均匀性,保持这种区别是很重要的。密度分布如图3,吸气通道内和吸气口处的流体密度为纯液体密度ρ0的数量级。因此,假设ρin=ρ0是合理的。对于平均流体速度v,采用了一个有适当流量系数α的简单孔板方程:(等式8)
对于大多数工业应用,空化流动的主要影响不是液体的蒸发和再冷凝,而是溶解气体的影响。早在压力降至液体的蒸汽压力之前,液压油中无处不在的空气含量导致气泡的形成。此外,一旦离开溶液的气体很难再溶解到液相中。因此,仅考虑不凝性气体(空气)的质量分数不变是合理的(既出于物理原因,也出于简单的考虑)。在不可压缩液相和理想气体分数的假设下,导出了液气混合物ρ=ρ(p)的简单状态方程,由此也可以很容易地导出体模量。对于10-5级的气体质量分数(FLUENT空化模型中的默认值相当于大气压下约1%的空气体积分数),在从零到一bar的压力区间内,具有从零到液体密度ρ0的全密度范围。这完全是等式(7)高度非线性的微分方程得出的。在文中同时考虑了液相的可压缩性。不过如果只涉及低压侧的吸入流的话,这步也不必要做。
图12比较了2D CFD结果和1D 模型对泵特性(质量流量和泵转速)的影响。两种模型都很吻合。每个CFD数据点都是通过在几个泵循环中运行非稳态模拟获得的,其中泵的速度在前几个循环中绝热开启。最后一个泵周期被用来获得时间平均值。

图12:循环平均泵流量作为泵速度的函数。在这种情况下,当泵转速超过3000 rpm时,就会产生空化的限流效应。将1D模型与2D CFD模拟结果进行了比较,结果表明两者吻合较好。为了清楚起见,已减去了人为泄漏的影响。
总之,我们在2D上证明了利用动网格工具和FLUENT中的空化模型进行非定常静液泵数值模拟的可行性。计算流体力学模拟对1D液压模型的确定和改进非常有帮助,因为它可以使人们深入了解流动的细节,而这些细节是无法或很难通过测量获得的。这使得CFD成为实验的一个很好的补充。后者并不是可有可无的,因为CFD的使用受到了很大的时间花费和理想化限制。2D模拟已经显示出很好的物理效应,如静液压泵的空化限制吸入流动。在2D CFD模拟和1D模型计算中的另一个观察结果与实际生活很好地吻合:气泡和空腔的形成,在空化通过泵的产量的限制表现出来之前。这正好标志着封装过程的最后一个阶段。在位移室中,空化的第一次发生在较早的时间。当每个细胞体积膨胀减速时,空穴开始消失,叶片细胞完全充满液体。直到泵的速度变得非常高,封装才会不完全。这与实验室的观测结果很吻合,即空化的第一个特征是声学特征。对质量输运的限制作用在很久以后才变得明显。
关于静液压泵的设计,目标可以是非常不同的。在轴向或径向柱塞泵中,需要在排量室中形成腔体,在一定阈值以上,它产生与泵速度无关的泵流量,而不需要电流调节阀。在叶片泵的情况下,空化的限流效应通常发生在低于所需的泵速水平,并且伴随着有害的效应。因此,确定限流效果明显的临界泵速是十分必要的。等式(8)中压力p0(即吸气头)的出现表明吸气通道内的压力分布是影响吸气通道内压力分布的主要因素。因此,压力损失必须最小化。然而,对1D模型的分析也表明,吸气通道内压力损失的最小化不能平衡叶片单元几何形状的奇怪设计。
在未来,从2D到3D CFD这一步是非常必要的。在一个更大的背景下,从填充率的问题来看3D的例子是一个主要的发现。例如,它允许在稳态抽吸通道流动模拟中控制边界条件的有效性。第5节中概述的网格运动方法也可以应用于3D案例,只要我们具有基于圆环轮廓的解析描述的位移单元的理想化几何形状。定子几何形状(吸气和压力通道和端口)必须从CAD数据中获取。用“MAP”算法可以很容易地对位移单元进行网格划分。对于相当复杂的定子几何形状,四面体网格是唯一合适的选择。面临的挑战是找到一种折衷的解决方案,以避免以下几个问题:网格单元总量过大、非共节点网格交界面附近单元质量不匹配以及人为泄漏过大。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















