















































软件

产品


摘要:
网格自适应,也称为自适应网格细化 (AGR),长期以来一直用于修改现有网格以准确捕获流动物理。这种方法有几个缺点,例如无法解析底层几何体、由于细化导致的运行时间过长以及网格质量下降。然而,Fidelity Pointwise 和 ISimQ 开发了一种新的网格自适应程序,有望解决这些挑战并使整个自适应过程自动化。在本文中,将网格自适应程序应用于 DrivAer 模型,以研究该自适应程序在商用航空车辆模型中的阻力预测中的功效。
计算流体动力学 (CFD) 解决方案可增强产品设计流程并帮助做出有利于产品的可靠决策。虽然使用商业 CFD 软件执行 CFD 模拟“很容易”,但结果的质量仍然完全落在 CFD 分析师的肩上。
CFD 仿真质量通常根据数值、模型和系统误差来衡量。模型误差源于湍流、传热、相变和化学反应等物理模型。系统误差与设备的真实表示和计算机表示之间的差异有关,例如几何细节水平和边界条件。数值误差是指控制守恒方程的离散 CFD 解。它们包括离散化误差、迭代误差和精度误差。与模型和系统误差相比,CFD 分析师直接控制数值误差。
在 CFD 模拟中,影响解决方案质量的最关键因素是网格划分。不能充分解决流动变量局部变化的网格间距会引入离散化误差(它们与网格相关);流动方程没有准确求解。另一方面,如果网格过度细化,计算时间和工作量会不必要地增加。在理想情况下,CFD 网格的元素相邻边之间呈 90º,体积膨胀率接近统一,并且网格纵横比较低。实际上,所有网格都达不到“完美”。
通过网格自适应,CFD 仿真从初始网格开始并改进网格以减少手头流动的离散化误差。最初,自适应算法估计截断误差。然后,他们丰富梯度最高区域的网格,努力减少离散化误差并确定模拟问题的“理想”网格。改编听起来令人印象深刻,并且也可以在商业 CFD 包中使用。不幸的是,大多数网格自适应程序否定了他们试图解决的主要好处:
在共同努力下,Pointwise 和 ISimQ 开发了一种新的网格自适应程序来应对上述挑战。适配程序以协调和自动化的方式将网格划分和求解步骤分开,由整体适配程序管理。
在第一步中,分析人员创建一个初始网格以启动适应过程。这个初始网格应该充分解决近壁边界层区域并控制目标近壁距离,从网格自适应过程中删除这个任务。在对初始网格进行第一次 CFD 模拟后,自适应算法提取关键流量变量的梯度并计算传感器场。
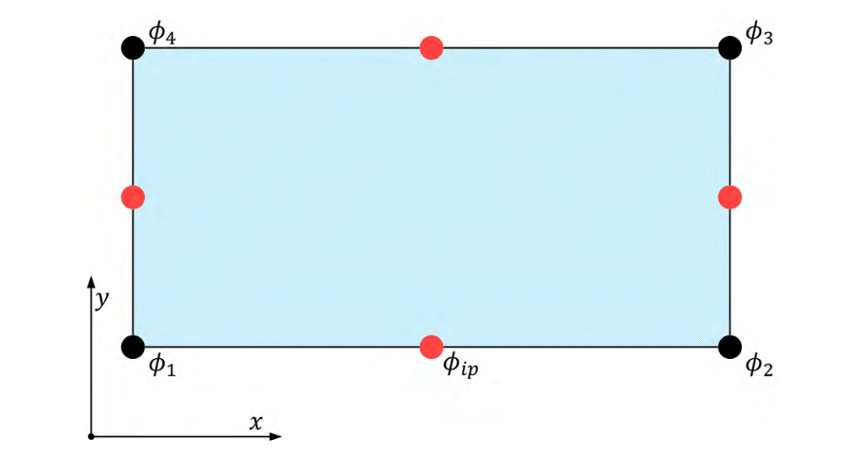
图 1. 网格单元和网格边
自适应软件计算点云目标边长并将其转发给 Fidelity Pointwise 网格划分软件,并生成改进的网格以实现所需的局部目标边长分布。自适应网格保留了初始用户定义的网格设置,最重要的是,边界层网格划分策略。自适应网格本质上符合网格生成器已知的底层几何形状。随着点云数据不断细化网格,网格质量随着每个网格自适应循环不断提高,并且不需要先验选择“局部细分”。作为奖励,适应过程自然地识别和纠正大网格膨胀率的区域。
整个过程在计算上是高效的,因为网格仅在局部区域被细化。然而,重新启动过程依赖于高质量和自动化的插值过程,将以前的解决方案映射到适应的网格上。此功能内置于许多 CFD 求解器中。存在“类似多重网格”的效果,其中主要流动特征和从一开始就调整流动的“艰苦工作”发生在较粗糙的网格上,计算量很小。自适应的更精细的网格需要更少的 CFD 模拟迭代,因为在自适应周期结束时网格变化很小。
最初,Pointwise 和 ISimQ 验证了涡轮机械流的自适应方法。此处,网格自适应技术应用于外部空气动力学问题。2011 年,德国慕尼黑工业大学引入了通用 DrivAer 模型,以缩小简化模型与高度复杂设计之间的差距,如图 2 所示。这种对称的封闭式汽车模型采用快背设计、标准后视镜、光滑的车身底部、通用轮辋和无胎面。
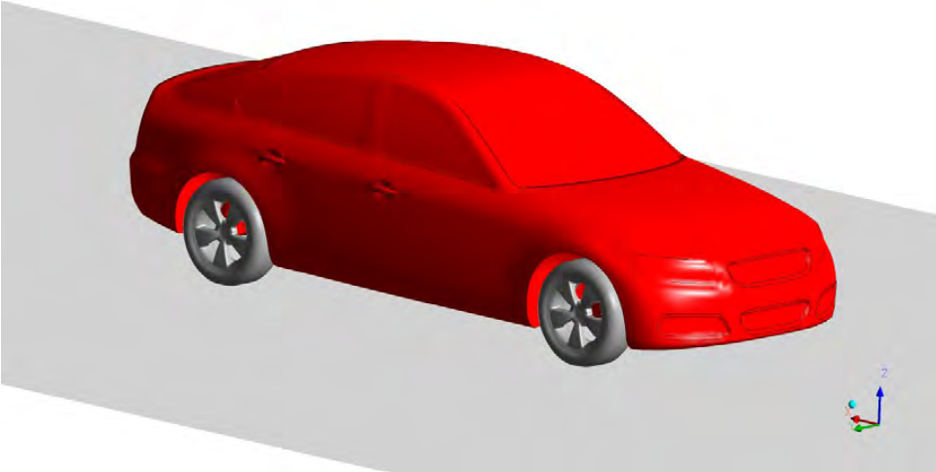
图 2. DrivAer 几何模型
使用对称模型,ISimQ 只需要模拟一半的几何体。推动适应性的流动求解器是 Ansys CFX。使用 SST 双方程模型模拟湍流对平均流量的影响。初始网格有 160 万个节点,最终适应的网格有 2440 万个节点。图 3 说明了自适应循环开始和结束时的网格细化。
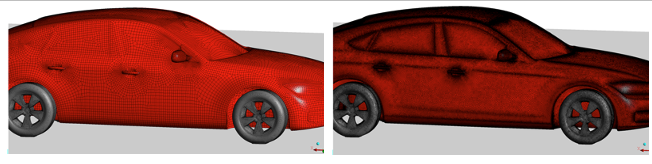
图 3. 自适应循环 1 后的表面网格(左),自适应循环 6 后的表面网格(右)
图 4 显示了适应周期 1 和 6 汽车后面的涡流,图 5 表明网格适应过程对几何形状敏感。与其他适应方案不同,当前的方法使圆形表面“更圆”并随着适应的进行而符合底层几何形状。
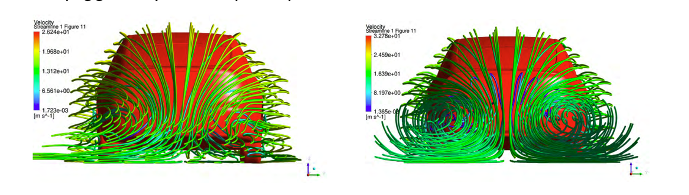
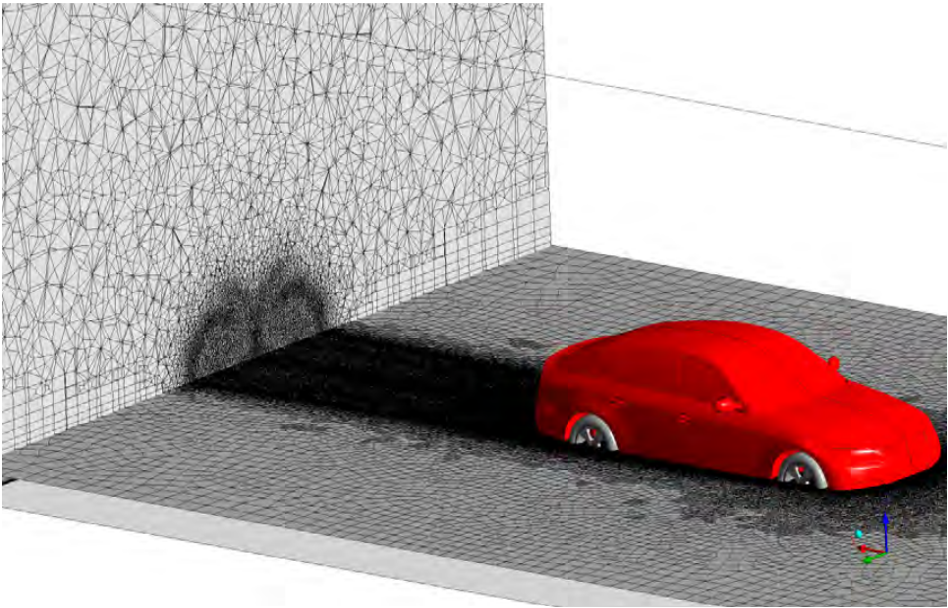
图 4. 自适应循环 1 后汽车尾流中的涡流(左),自适应循环 6 后汽车尾流中的涡流(右)
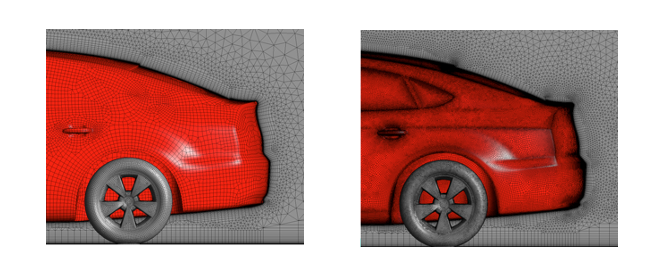
图 5. 适应周期 1 后汽车后部的网格(左),适应周期 6 后汽车后部的网格(右)
图 6 显示了汽车阻力随适应周期的变化。随着网格变得更细,阻力逐渐接近 68N 左右的值。
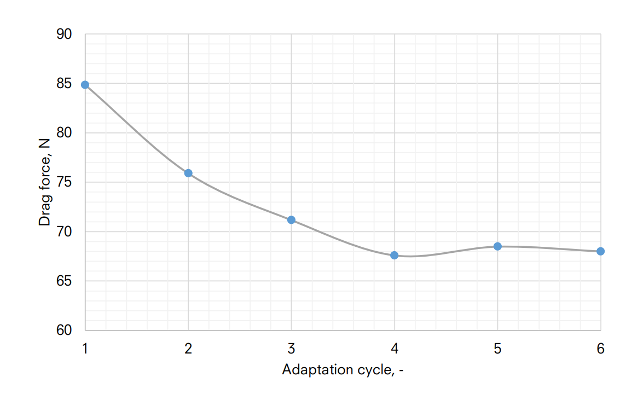
图 6. 阻力作为适应周期的函数
Fidelity Pointwise 和 ISimQ 开发了一种新的网格适应过程,旨在实现适应的长期希望和承诺。DrivAer 模型研究证实,这种新的网格自适应方法可以成功地用于飞行器中的精确阻力预测。此外,自适应方法在自适应过程中确认底层几何形状,调整流拓扑,并连续改进网格质量,从而实现高度稳健和高效的自动化网格自适应过程。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















