















































软件

产品


扫地机器人已经逐渐为人所知,进入越来越多的家庭。边刷作为扫地机器人的核心零件之一,其作用是将扫地机器人无法抵近的墙边与角落的灰尘清扫出来,以便吸尘器将灰尘吸干净。为了防止碰撞墙壁等障碍,现在很多扫地机器人都采用红外探测,会在距离障碍物几公分的地方停下来。边刷在扫地机器人的边缘,一般超出机体5-8公分,能有效清扫角落里的灰尘。
边刷的设计需满足众多技术指标,出于商业保密目的,本文不讨论具体设计方法,仅从仿真分析技术角度简单介绍边刷与地面的接触分析。
建立分析系统
本次分析刷头与地面的静态接触情况,建立一个静力分析系统。

材料定义
定义边刷各部分的材料模型。
几何处理
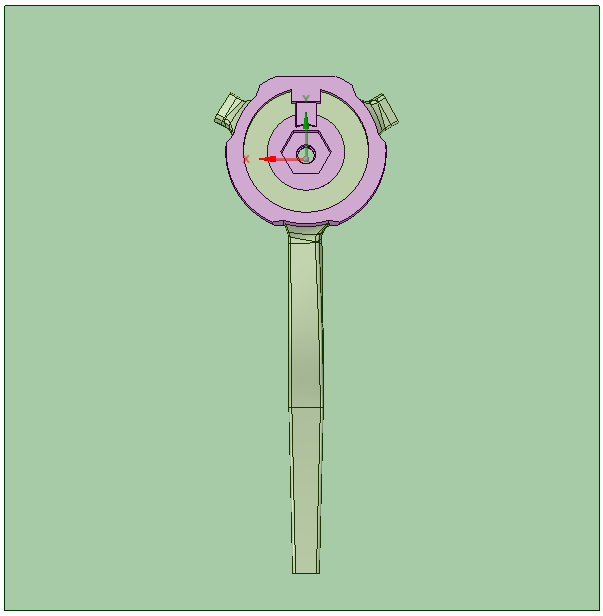
在ANSYS的几何处理工具Space Claim中对几何模型进行简化处理,本次分析的边刷一共有三个刷头,为节省计划时间,切除其中两个刷头仅保留一个刷头,分析其与地面接触情况。处理完的几何模型如下图所示(俯视地面)。
接触定义
装配体导入,Workbench会根据几何公差自动在部件间定义接触对,默认为Bonded类型。建议逐一检查接触对,根据需要修改接触类型。

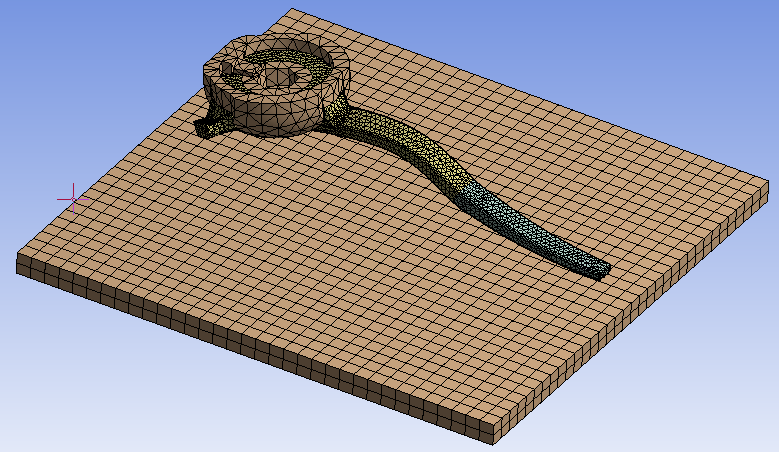
网格划分
首先划分较粗糙网格进行试算,检验材料参数、零件装配、接触对以及载荷等是否正常,再采用二分法调整单元尺寸或对局部进行细化,直至结果满足精度要求。
求解设置
接触问题不收敛可能有众多原因,如材料、接触对的定义、网格尺寸等因素有关,但更多时候是求解设置不当导致分析不收敛。建议打开大变形开关,采用自动时间步,适当调整初始/最小/最大求解子步以及接触刚度,通常情况下即可取得收敛结果。
分析结果
刷头与地面的接触动画如下图

应力分布

接触力的变化

刷头的位移响应
最开始没有找到Workbench中的解决方法,只好将结果又导入APDL中,将刷头的位移按求解子步写出,再绘成曲线。
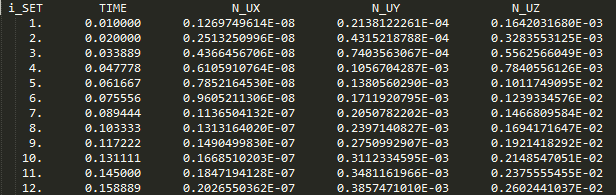
后面发现其实Workbench中处理更方便,直接定义一个User Defined Result,省去编写APDL代码写出结果的麻烦。

3.总结
刷头与地面的静力接触力分析,是一个基础、典型的接触分析,涉及局部坐标系、远程点/远程位移、接触对定义、Named Selections、非线性求解设置,以及后处理中变形、应力、接触力、节点位移响应等应用。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















