软件

产品


导读
ANSYS Mechanical具有强大的非线性计算能力,能够对几何非线性、材料非线性、接触非线性、混合非线性(塑性和接触等)、非线性屈曲等计算问题进行非常好的模拟仿真,是目前最强大的非线性问题计算软件之一。
限于篇幅,本文仅对非线性求解与收敛、接触非线性问题中涉及的设置等内容进行简要整理和说明,以期望对于ANSYS Mechanical接触非线性设置的使用有一定的帮助作用。
本文原稿基于ANSYS Documentation-ANSYS Mechanical User's Guide中部分章节内容以及其他相关技术文档进行整理编写,另外原稿整理时间较早,部分设置与ANSYS18/19版本不尽相同。
本文共 6737 个字,预计用时超过10分钟,您将学到以下内容:
1、非线性求解与收敛
-收敛与收敛判据
-载荷步,时间步与平衡迭代
-求解控制
-重启动控制
-非线性控制
2、接触与接触设置
-接触协调
-探测方法
-修剪接触
-穿透和华移容差
-法相接触刚度
-Pinball 区域
-对称/非对称行为
-接触中的体类型
-界面处理与接触几何修正
-接触工具
-自接触设置
-单元死生与接触过程控制
一、非线性分析背景
1、结构非线性的定义
江边渔者垂钓的鱼竿、承载运动器重量的轮胎、重型机械零件的锻造、薄板零件的冲压与折弯等,都涉及结构非线性问题。
对这些结构绘制载荷与变形的曲线,均不再符合胡克定理 ,而表现出非线性结构的基本特性,结构刚度不再是常量,而成为函数变量。
2、非线性行为类型
① 几何非线性
当结构经受大变形时,变化的几何形状可能会引起结构的非线性响应。例如鱼竿提线的过程、大型壳体结构非线性屈曲的过程,都属于几何非线性问题。
② 材料非线性
金属塑性、橡胶材料超弹体与粘弹性、混凝土问题、率相关性蠕变等问题都是典型的材料非线性问题。
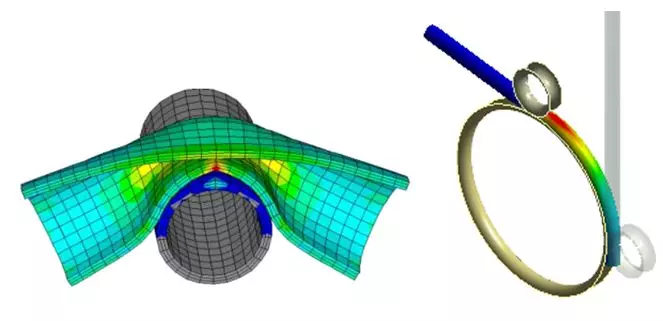
图1 混合非线性
③ 接触非线性
接触是种普遍的非线性行为,是状态变化非线性类型中特殊而重要的子集。当零件彼此之间接触与分离,接触刚度会发生相应的改变。
非线性问题通常不会单一出现,ANSYS Mechanical具有同时处理混合非线性问题的能力,如图1所示就是混合非线性的问题,同时考虑金属的塑性与接触的非线性问题。
3、构建非线性模型
适度的非线性行为求解采用的几何设置、网格通常无需修正,与线性行为一致。
多数情况需要对若干特性进行修正,包括单元的特性、非线性材料数据(塑性、蠕变、超弹体等)、几何建模(奇异引起不收敛问题)等。
如下设置与修改,可能有益于非线性分析问题的收敛。
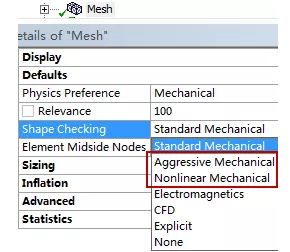
① 修改【Mesh】→【Shape Checking】选项为“Aggressive Mechanical”或“Nonlinear Mechanical”,如图2所示,这能够提供一种增强的单元质量处理大应变分析中过度扭曲。
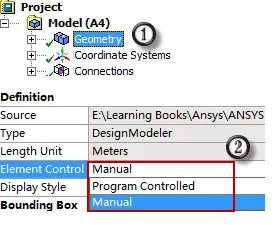
② 修改【Geometry】→【Element Control】选项为“Manual”,可以在完全积分与减缩积分策略中进行切换。该选项影响单元中积分点的数量,如图3所示。例如强制修改完全积分应用于高阶单元(默认采用一致减缩积分),这通常有助于厚度上仅有一层单元的结构,以提高计算求解精度。
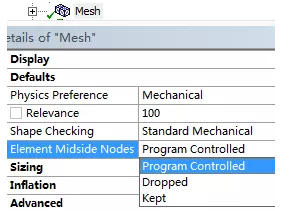
③ 默认情况下,结构单元将默认采用具有中间节点的高阶单元。通过图4中所示进行高阶单元(Kept)与低阶单元(Dropped)的转换。
图2 Shape Checking
图3 Element Control
图4 Element Midside Nodes
二、非线性求解与收敛
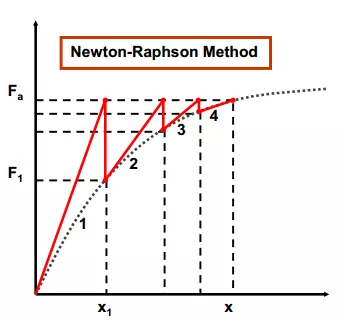
(一)牛顿-辛普森方程
非线性分析中,不能直接由线性方程求得响应,需要将载荷分解成许多增量求解,每一增量确定一平衡条件。
ANSYS Mechanical 使用牛顿-辛普森方程(Newton-Raphson)平衡迭代法进行非线性问题的求解。每个载荷增量步结束时,平衡迭代驱使解回到平衡状态。
其中:




图5 牛顿-辛普森方程
如图5所示是一个载荷增量四个迭代步的迭代求解过程:
第一次迭代施加总载荷 






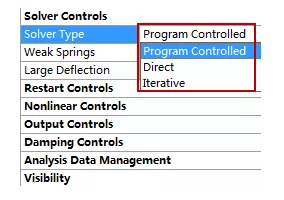
(二)收敛与收敛判据
牛顿-辛普森方程需要一个收敛度量以决定迭代的过程,定义“残差”是外部载荷与内部载荷的差值:
通常认为当残差足够小的时候
即当残差的范数小于指定容差因子乘以参考力值时,就认为得到了收敛的求解数值(实际上残差从未真正等于0)。
其中:



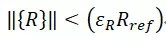
(三)载荷步,时间步与平衡迭代
1、载荷步,时间步与平衡迭代
非线性求解过程可以按照三个层次进行组织:
① 载荷步是顶层,求解选项、载荷与边界条件都施加于某个载荷步内。
② 时间步是载荷步中的载荷增量,时间步用于逐步施加载荷。
③ 平衡迭代是为得到给定时间步(载荷增量)的收敛解而采用的方法。
图6 两个载荷步的求解
率相关分析(蠕变,粘塑性)与瞬态分析中,“时间”代表真实的时间。
率无关的静态分析,“时间”表示加载次序。
2、自动时间步
“自动时间步”基于结构对于应用载荷的响应,在每个子步结束将会计算一个优化的时间步长。
“自动时间步”通过求解过程自动调节载荷增量,可以定义初始载荷步、最小载荷步和最大载荷步。
难收敛的求解问题,将会施加更小的增量。当收敛困难时,自动时间载荷步算法将进行“二分”,求解将返回最后一个成功收敛的子载荷步,按照更小增量施加载荷(通常设置为上次的一半)。
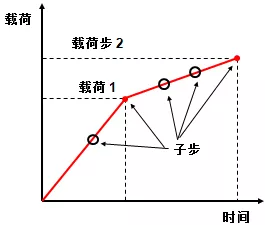
(四)求解控制
图7 求解控制
结构静力学【Static Structural】和结构瞬态动力学【Transient Structural】分析模块均可以考虑非线性分析问题。
1、【Solver Type】求解类型
(1) Program Controlled程序控制能够根据求解问题自动选择求解器。
(2) Direct (Sparse)稀疏求解器更稳健,推荐用于梁壳等结构中。
(3) Iterative (PCG)更有效率,适合用于大型结构求解。
2、【Weak Springs】弱弹簧
用来防止结构刚体位移导致的计算不收敛,引入Weak Springs能帮助求解收敛。由于刚度很小,不会明显影响结构的计算结果。
3、【Large Deflection】大变形
① 对于结构瞬态动力学,默认设置为Large Deflectio=On。
② 对于静力学分析模块,需要修改Large Deflection=On。
Large Deflectio=On,使分析考虑大变形、大旋转和大应变引起的单元形状和方向的改变,计算结果更为准确。
(五)重启动控制
重启动技术用于已经停止计算的问题再次提交求解。能够对不收敛的计算进行修改,例如分析设置、载荷等,也能对已经完成求解的模型进行扩展分析,例如增加新载荷步、求解时间等。
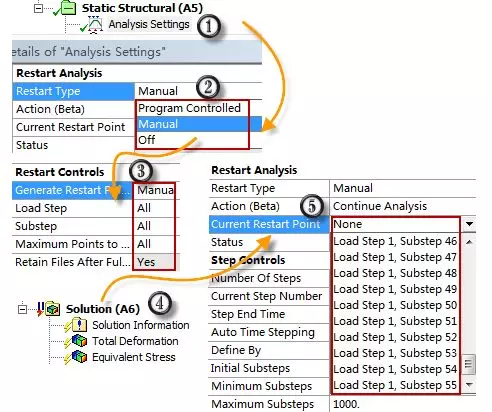
如图8所示,重启动设置的过程一般如下:
1、修改Generate Restart Points=Manual。
2、 修改Load Step,设置为Last或者All
3、修改Substep选项用于指定“Load Step”内生成多少个重启动点。可选择“Last、All、Specified、Equally Spaced”等方法进行定义。
4、默认情况下,重启动文件是自动删除的,需要修改Retain Files After Full Solve=Yes,设置Future Analysis=Prestressed analysis或Delete Unneeded Files=No,都可以保留重启动文件。
5、当求解计算不收敛时,通过图8步骤的方式,建立重启动点的设置,再次提交求解计算。
图8 重启动控制
(六)非线性控制
1、【Newton-Raphson Option】:略。
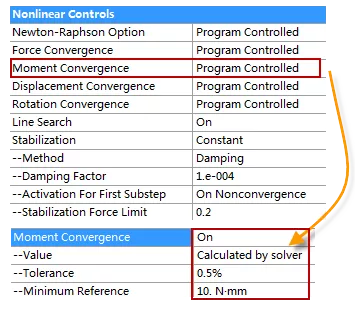
2、 默认的收敛准则包括:
①【Force Convergence】
② 【Moment Convergence】
③ 【Displacement Convergence】
④ 【Rotation Convergence】
默认的收敛准则适应于大多数的工程应用,可以重新修改默认收敛准则的容差,使其更加容易收敛,但这也会影响计算结果的精确程度。对于力 / 力矩缺省的容限是0.5%。对于位移 / 旋转增量的容限是 5%。
3、【Line Search】线性搜索:线性搜索有助于收敛,通过一个0-1的比例因子去影响位移增量帮助收敛,适合于施加力载荷、薄壳、细长杆结构或求解收敛震荡的情况。
4、【Stabilization】稳定性:用于非线性屈曲分析,限于本文宗旨和篇幅,不进行展开说明。
图9 非线性控制
三、接触与接触设置
(一)接触的基本概念
两个分离的表面接触并相互剪切时,就称它们处于接触状态。处于接触状态的表面具有如下特点:
① 不互相穿透。
② 能够传递法向压力和切向摩擦力。
③ 通常不传递法向拉力。
接触一般可以考虑两类接触问题:①刚性体-柔性体、②柔性体-柔性体。其中刚性体不计算应力等。
ANSYS Mechanical提供如下接触类型和接触行为:
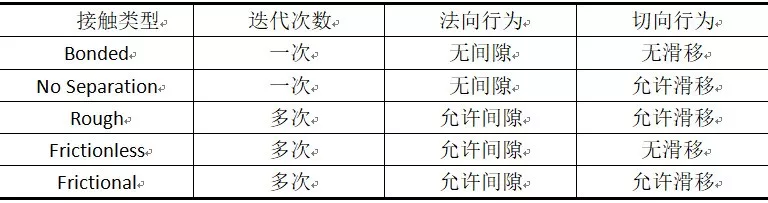
① 绑定Bonded:没有穿透,不分离,面或者边以及两者之间不出现滑动。
② 不分离No Separation:与绑定类似,法向不分离,允许接触面发生小量无摩擦滑动。
③ 无摩擦Frictionless:不穿透,表面之间自由滑动,分离不受阻碍。
④ 摩擦Frictional:滑动阻力与摩擦系数成正比,自由分离不受阻碍。
⑤ 粗糙Rough:与无摩擦类似,但是不允许滑移。
后三种接触行为均为非线性接触行为,接触行为与迭代次数如表1所示。
表1 接触行为与迭代次数
(二)接触协调
图10 接触协调
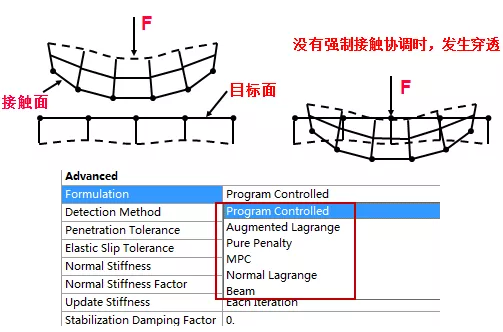
ANSYS Mechaniacal提供多个接触公式来建立接触面的强制协调性,如图10所示。
1、罚函数法(Pure Penalty)
罚函数法用一个接触“弹簧”在两个面间建立关系,弹簧刚度称为惩罚参数或接触刚度;当面分开时(开状态),弹簧不起作用;当面开始穿透时(闭合),弹簧起作用。
弹簧偏移量(穿透量)


2、Lagrange乘子法
Lagrange乘子法通过增加一个附加自由度 (接触压力)来满足不可穿透条件,不涉及接触刚度和穿透。
用压力自由度得到0或者接近0的穿透量,不需要法向接触刚度,采用直接求解器,只对接触表面的法向施加力。Lagrange乘子法经常处于接触状态的开与关,容易引起收敛震荡。
3、增广 Lagrange法
将罚函数法和Lagrange乘子法结合起来强制接触协调,称之为增广agrange法。
由于额外因子

④ 多点约束算法(MPC)
MPC通过添加约束方程来“联结”接触面之间的位移。采用MPC算法的绑定接触支持大变形分析。只能用于绑定和不分离类型的接触。
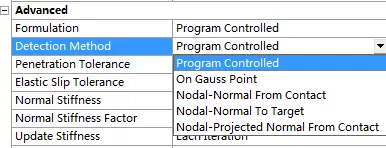
(三)探测方法
如图11所示,探测方法(Detection Method)包括如下几项:
图11 Detection Method
图12 积分点与节点探测
1、On Gauss point
纯罚函数Pure Penalty和增广Lagrange默认使用“On Gauss point”进行探测。探测点更多,认为是比节点探索更准确的检测方法.
但有时需要采用基于节点的探测方法,特别是用于楞尖形状与线面接触的情况。
2、Nodal- Normal to Target
拉格朗日与MPC公式默认使用“Nodal- Normal to Target”方法,探测点更少。
3、Normal from Contact or Normal to Target
垂直于接触面或者目标面方法,决定了应用在接触面上接触力的方向。
4、Nodal-Projection Normal from Contact
Nodal-Projection Normal from Contact在接触和目标表面的重叠区域强制作用一个接触约束。接触渗透/间隙计算是在重叠区域平均意义上计算的。
相比其他设置,Nodal-Projection Normal from Contact提供更精确的下层单元接触压力。
当有摩擦的接触面和目标面之间存在偏移时,更好的满足力矩平衡。
(四)修剪接触
图13Trim Contact
1、修剪接触(Trim Contact)能够自动减少接触单元的数量,从而加快计算速度。
① 当设置“Program Controlled”选项时,默认自动开启“Trim Contact”。
② 手动创建接触对不进行修剪设置。
③ 大变形滑移时,建议不开启修剪接触。
2、修剪容差Trim Tolerance用来定义修剪操作的上限。
① 对于自动接触,这个选项显示了接触探测的值(只读格式)。
② 对于手动接触,需要用户输入大于零的值。
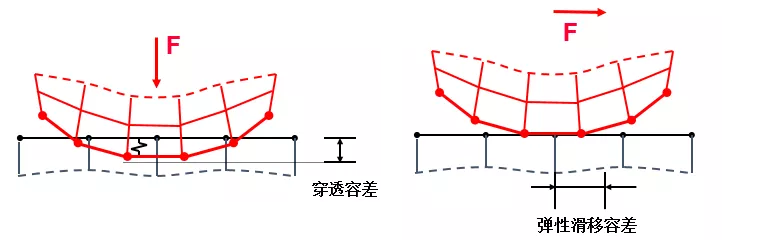
(五)穿透和滑移容差
1、穿透容差(Penetration Tolerances)
① 该设置仅适用于罚函数法和增强拉格朗日法。
② 可以通过定义一个数值,或者根据下层单元厚度定义一个因子。
③ 默认等于0.1*单元厚度。
2、弹性滑移容差(Elastic Slip Tolerance)
如果弹性滑移在许可的容差范围内,接触协调性在切向满足要求。
① 通过定义一个数值,或者根据下层单元厚度的平均值定义一个因子。
② 绑定、粗糙、摩擦接触等增强了切向的协调性。
③ 许可容差默认为平均单元长度的1%。
图14 穿透和滑移容差
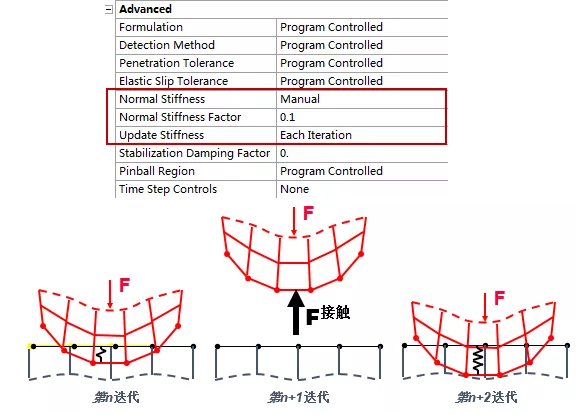
(六)法向接触刚度
图15 Normal Stiffness
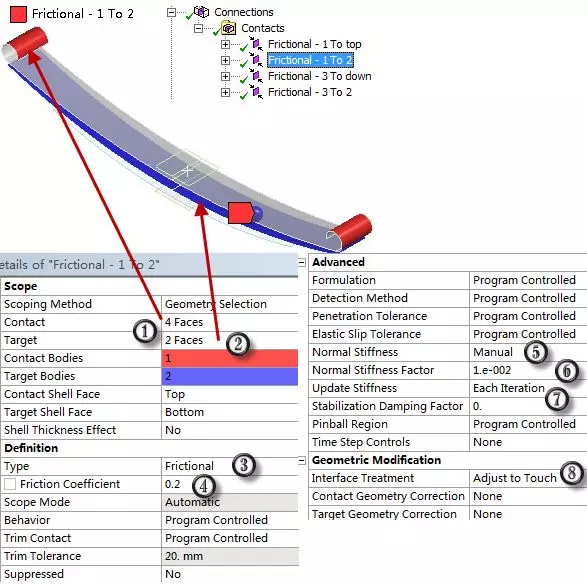
1、法向接触刚度(Normal Stiffness)是影响精度和收敛行为最重要的参数,适用于“Pure Penalty”或“Augmented Lagrange”。
2、法向接触刚度Normal Stiffness是一个相对因子。一般变形问题建议使用1.0,弯曲支配情况下如若收敛困难情况,小于0.1的值对于收敛问题有益。
3、接触刚度在求解中会自动调整,对于收敛困难问题,刚度自动减小。
4、刚度越大,结果越精确,收敛变得越困难。但是接触刚度太大,模型会振动,接触面会相互弹开。
5、系统默认自动设定法向刚度Normal Stiffness。可以输入法向刚度因子Normal Stiffness Factor”,因子越小,接触刚度就越小。
① 默认FKN =10 (对于绑定和不分离的接触)。
② 默认FKN = 1 (其他形式接触)。
6、 法相刚度的一般准则为:
① 体积为主的问题,接触刚度因子选择默认或者为1。
② 弯曲为主的问题,采用0.01-0.1之间比较适合。
(七) Pinball区域
图16 Pinball区域
Pinball区域用于区分远场开放和近场开放状态,是包围每个接触探测点周围的球形边界(2D或者3D)。
① 目标面上的节点处于Pinball区域的球体内, ANSYS Mechanical就会认为它“接近”接触,会更加密切地监测它与接触探测点的关系。
② 在球体以外的目标面上的节点相对于特定的接触探测点不会受到密切监测。
③ 如果绑定接触的缝隙小于Pinball半径,Workbench -Mechanical仍将会按绑定来处理那个区域。
1、Pinball区域的用途
① 当搜寻给定接触区域可能发生接触的单元时,区分开“近”和“远”接触,提高接触计算的效率。
② 确定绑定接触允许缝隙的大小。如果激活MPC公式,Pinball区域也决定多少个节点包含在MPC方程中。
③ 确定可以包含的初始穿透深度。
2、对于每个接触探测点有4个选项来控制Pinball区域的大小
① 程序选择:Pinball区域通过程序控制自动设置,单元类型和单元大小由程序计算给出。
② 自动探测数值:Pinball区域等于全局接触设置的容差值。
③ 半径:设置本项后,手动为Pinball区键入需要的半径数值。
④ 因子:采用因子控制,目前为版本的测试功能。
(八) 对称/非对称行为
ANSYS Mechanical中对于每一个接触区域Contact Region中,都会显示接触面和目标表面,接触面以红色表示,目标面以蓝色表示,如图17所示。
图17 接触区域
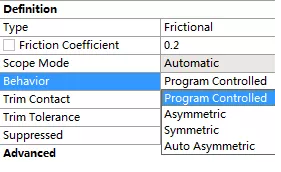
1、 接触行为
接触行为具有如下行为:
① 程序控制(Program Controlled):程序控制采用自动非对称(Auto Asymmetric)。
② 对称接触(Symmetric):接触面和目标面不能相互穿透。
③ 非对称接触(Asymmetric):限制接触面不能穿透目标面。
④ 自动非对称(Auto Asymmetric):接触面和目标面由程序进行控制。
图18 接触行为
2、非对称行为接触表面的正确选择指导
① 如果一凸的表面要和一平面或凹面接触,应该选取平面或凹面为目标面。
② 如果一个表面有粗糙的网格而另一个表面网格细密,则应选择粗糙网格表面为目标面。
③ 如果一个表面比另一个表面硬,则硬表面应为目标面。
④ 如果一个表面为高阶而另一个为低阶,则低阶表面应为目标面。
⑥ 如果一个表面大于另一个表面,则大的表面应为目标面。
(九)接触中的体类型
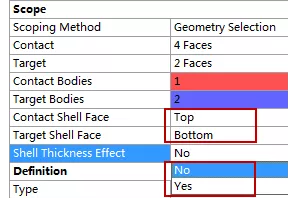
1、ANSYS Mechanical支持实体结构的表面、壳面、边与边、边与面之间建立接触行为。
2、面体建立无摩擦或摩擦接触时,需要确定壳面体哪一侧(Top或Bottom)处于接触关系中,创建失误会导致无法识别接触,如图19所示处理过程。
3、面体素之间建立接触时,能够设置面体厚度影响【shell thickness effect】。
4、接触对支持在刚体之间、刚体和柔体建立。
① 刚体之间采用罚函数方法,需要手动设置反对称接触。
② 刚体和柔体建立接触采用增广拉格朗日法,程序控制设置接触行为为反对称,接触面是柔性体,目标面体是刚性体。
图19 接触中体类型设置
(十)界面处理与接触几何修正
图20 界面处理
1、界面处理(Interface Treatment)
如果初始接触没有很好建立,零件相互作用,可能导致一个零件直接“穿越”另一个零件,引起刚体运动。
绑定接触行为通过建立一个足够大Pinball半径允许忽略接触和目标面间任何间隙。但是对于摩擦或无摩擦接触,初始缝隙无法被自动忽略,这是因为它有可能代表几何信息(相互接触或脱离接触)。
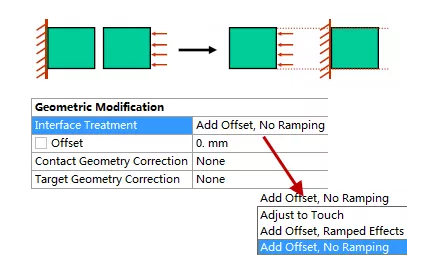
界面处理设置Interface Treatment可以内部偏移接触面到一指定的位置,如图20所示。 通过Adjusted to Touch或Add Offset选项,能够把模型调整到合适位置而不需要修改几何。
① Adjusted to Touch
ANSYS Mechanical能够决定需要多大的接触偏移量来闭合缝隙建立初始接触,这需要保证Pinball半径大于最小的缝隙尺寸。
② Add Offset
能够自定义来指定允许接触面偏移的正负距离。
1)正值关闭缝隙。
2)负值打开缝隙。
Add Offset有两个选项:
1)Add Offset, Ramped Effects:一个载荷步分割为几个子步逐步施加,难于收敛的干涉问题建议使用。
2)Add Offset, No Ramping:一个子步一次完成载荷施加。
2、接触几何修正(Contact Geometry Correction)
接触几何修正选项包括Bolt Thread和Smoothing两项,仅对Contact Geometry Correction -Bolt Thread进行说明。
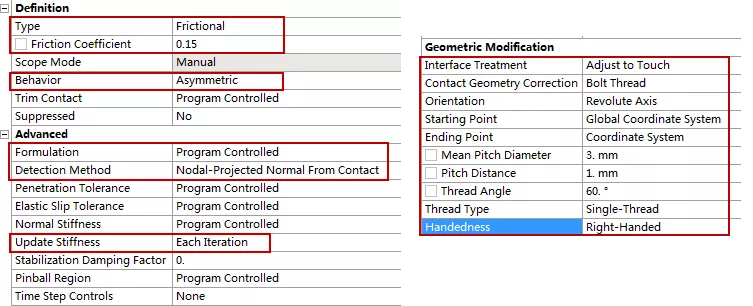
Bolt Thread能够利用简化圆柱模拟螺栓连接,一般设置过程包括:
① 创建接触关系,如图21所示。
② 接触几何修正:定义Orientation方向,如图21本例中采用Revolute Axis建立坐标系需要设置起始点Starting Point和终止点Ending Point。
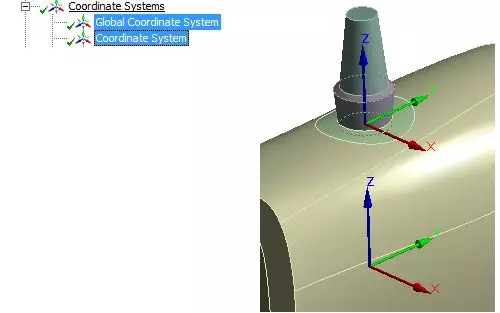
③ 建立起始点和终止点坐标系,如图22所示。
④ 定义螺栓螺纹基本参数,例如平均螺纹直径Mean Pitch Diameter,螺距Pitch Diameter,牙型角Thread Angle,单、多线螺纹Thread Type以及左右手定则Handedness等。
图21 接触关系设置
图22 创建局部坐标系
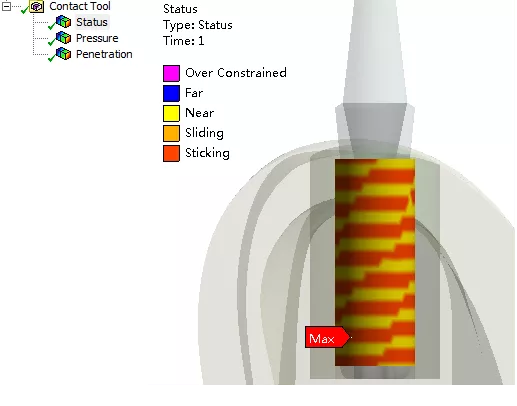
图23 接触结果
(十一)接触工具
Connections下能够建立接触Contact Tool工具,用于加载前验证初始信息(状态, 间隙, 渗透, pinball等),具体建立流程如图24所示。其主要用于获得接触相关结果数据。
图24 接触Contact Tool工具
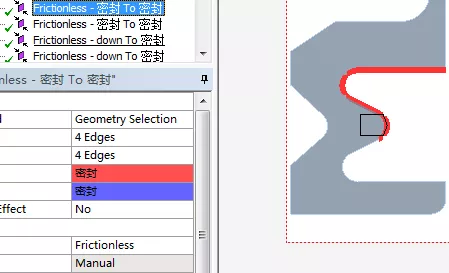
(十二)自接触设置
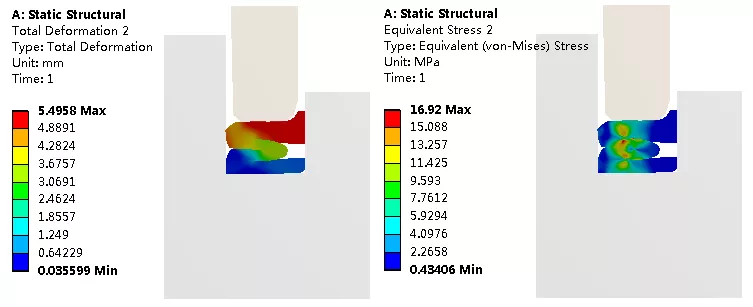
对于橡胶等大变形特性分析的结构,经常出现自接触问题,需要进行考虑,ANSYS Mechanical进行自接触设置极为简单,仅需对自接触的接触区域重复两次即可,如图25所示,一些自接触密封件挤压结果如图26所示。
图25 自接触定义
图26 自接触密封分析
(十三)单元死生与接触过程控制
单元死生技术与接触过程控制技术能够对接触过程中特定内容进行在特定子步的杀死和激活,如图27所示。
图27 单元死生与接触控制
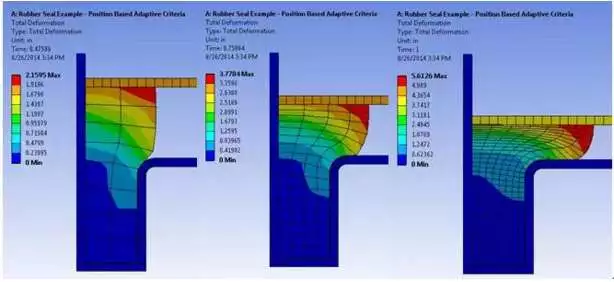
(十四)自适应网格控制
ANSYS Mechanical具有很好的自适应网格控制能力,通过自适应网格划分技术能够解决非线性分析问题中单元畸形的问题,但是目前还不能在ANSYS Mechanical中考虑接触的自适应网格划分,需要借助于MAPDL完成。
自适应网格划分首先需要打开如下选项:
① Large Deflection=On
② Store Results At= All Time Points
定义Manual能够定义起始时间和结束时间,能够定义多组Nonlinear Adaptive Region,对不同时间内划分方法进行相应控制。
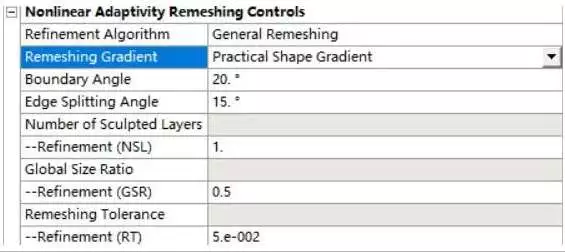
另外通过Analysis Settings”获得“Nonlinear Adaptivity Remeshing Controls”策略定义。
图28 Time Range
图29 Nonlinear Adaptivity Remeshing Controls
图30 求解信息中网格重划
图31 网格重划
四、写在文后
本文依据ANSYS Documentation-ANSYS Mechanical User's Guide中部分章节内容以及其他相关技术文档进行整理编写,给出部分求解收敛、接触设置最基础的说明,以期许对于初学者有一定的帮助作用。另外本文无意于去比较其他软件中对于非线性计算的能力,仅仅作为一种普及ANSYS Mechanical部分知识使用。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020