















































软件

产品


该项目是广州某VR设备生产厂商给国外提供的一款产品,项目中分析对象为四人座时空穿梭机机架,其三维模型如图1.1.1所示,该四人座时空穿梭机机架采用三个电缸升降机构。动力输出由三个电缸提供。时空穿梭机机架主要受力结构包括上架、电缸、下支撑架等零部件,也是时空穿梭机机架结构的主要分析对象,该分析对象共有118个零件。

图1.1.1 VR四人座时空穿梭机整体效果图
在四人座时空穿梭机以最大工作载荷工作时,根据时空穿梭机的实际工况进行分析,分析机架结构受力情况,根据计算结果判断各零部件的结构安全性,并提出改进或优化建议。
基于此次分析目的,拟采用准静态的分析方法,分别使用分析软件ANSYS Workbench和Simsolid 对结构进行分析,并对结果进行对比,其中ANSYS Workbench需要对模型进行简化以及划分网格。
ANSYS Workbench考虑到分析模型的网格划分情况,将实体模型中的倒角,小孔等对分析影响不大的特征去掉,简化完成的分析模型如图2.1.1A所示。

图2.1.1A VR四人座时空穿梭机机架简化模型
Simsolid模型无需简化,保留实体模型中的倒角、小孔,分析模型如图2.1.1B所示。

图2.1.1B VR四人座时空穿梭机机架未简化原模型
ANSYS Workbench需要网格划分而Simsolid则无需划分,根据图2.1.1A建立的简化模型,导入Ansys Workbench中进行网格划分,大量采用六面体网格划分,网格质量优秀,完全适应Ansys对网格的约束条件,如图2.1.2所示,网格数量176077个。

图2.3.1 VR四人座时空穿梭机机架有限元网格模型
工况一:三个电缸处于水平位置时,进行仿真模拟计算;
工况二:前电缸处于最高位置,后面两个电缸处于最低位置;
工况三:前电缸处于最低位置,后面两电缸处于最高位置;
工况四:右侧电缸处于最低位置,左侧电缸处于最高位置。
| 模型名称 | 材料 | 弹性模量 GPa | 泊松比 | 密度(kg/m3) | ||
| 时空穿梭机 | Q235 | 210 | 0.3 | 7850 |
表2.4.1 模型单位设置
| 长度 | 时间 | 质量 | 力 | 压力 | |
| 单位 | mm | s | T/kg | N | MPa |
如图2.5A/2.5B中每个U形折弯梁施加75KG的力,总计600KG

图2.5A ANSYS Workbench环境下VR四人座时空穿梭机机架载荷设置

图2.5B Simsolid环境下VR四人座时空穿梭机机架载荷设置
四人座时空穿梭机机架底座十二个支撑位置施加固定约束,见图2.6A/2.6B

图2.6A ANSYS Workbench环境下VR四人座时空穿梭机机架约束设置

图2.6B Simsolid环境下VR四人座时空穿梭机机架约束设置


工况一采用ANSYS Workbench用时14分钟,计算最大位移5.38mm,见图3.2A,工况一采用Simsolid用时56秒,计算最大位移5.09mm,见图3.2B,两者误差5.4%,这里需要注意,由于该结构薄壁件较多,Simsolid导入模型时一定要勾选Adapt to thin solid,否者计算精度较差。

图3.2A ANSYS Workbench工况一位移云图

图3.2B Simsolid工况一位移云图
由于在ANSYS Workbench分析时采用了模型简化,因此与Simsolid计算得到的最大应力位置会有些不同,为了准确的对比计算精度,选取一个在ANSYS Workbench简化较少的位置同时网格精细度良好的位置提取应力然后对比,见图3.3A/3.3B,两者计算误差2.6%。

图3.3A ANSYS Workbench工况一应力云图

图3.3B Simsolid工况一应力云图

图4.1 VR四人座时空穿梭机机架工况二示意图
工况二采用ANSYS Workbench用时14分钟,计算最大位移4.8mm,见图4.2A,工况一采用Simsolid用时22秒,计算最大位移4.12mm,见图4.2B,两者误差14.2%,此时误差较大,暂时没有发现模型哪块有问题,这里需要注意,由于该结构薄壁件较多,Simsolid导入模型时一定要勾选Adapt to thin solid,否者计算精度较差
图4.2A ANSYS Workbench工况二位移云图

图4.2B Simsolid工况二位移云图
由于在ANSYS Workbench分析时采用了模型简化,因此与Simsolid计算得到的最大应力位置会有些不同,为了准确的对比计算精度,选取一个在ANSYS Workbench简化较少的位置同时网格精细度良好的位置提取应力然后对比,见图4.3A/4.3B,两者计算误差41.5%,误差较大,没有发现模型有问题。
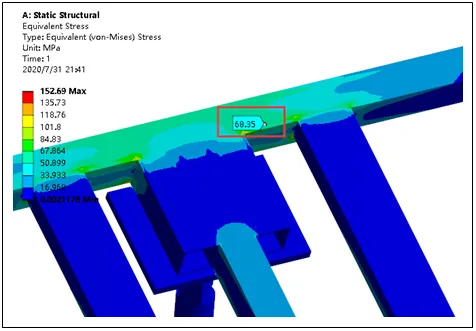
图4.3A ANSYS Workbench工况三应力云图

图4.3B Simsolid工况三应力云图


工况三采用ANSYS Workbench用时14分钟,计算最大位移5.62mm,见图5.2A,工况三采用Simsolid用时22秒,计算最大位移5.11mm,见图5.2B,两者误差9.1%,这里需要注意,由于该结构薄壁件较多,Simsolid导入模型时一定要勾选Adapt to thin solid,否者计算精度较差。

图5.2A ANSYS Workbench工况三位移云图

图5.2B Simsolid工况三位移云图
由于在ANSYS Workbench分析时采用了模型简化,因此与Simsolid计算得到的最大应力位置会有些不同,为了准确的对比计算精度,选取一个在ANSYS Workbench简化较少的位置同时网格精细度良好的位置提取应力然后对比,见图5.3A/5.3B,两者计算误差20%。

图5.3A ANSYS Workbench工况三应力云图

图5.3B Simsolid工况三应力云图

图6.1 VR四人座时空穿梭机机架工况四示意图
工况四采用ANSYS Workbench用时14分钟,计算最大位移5.62mm,见图6.2A,工况四采用Simsolid用时22秒,计算最大位移4.42mm,见图6.2B,两者误差21%,误差较大,这里需要注意,由于该结构薄壁件较多,Simsolid导入模型时一定要勾选Adapt to thin solid,否者计算精度较差。

图6.2A ANSYS Workbench工况四位移云图

图6.2B Simsolid工况四位移云图
由于在ANSYS Workbench分析时采用了模型简化,因此与Simsolid计算得到的最大应力位置会有些不同,为了准确的对比计算精度,选取一个在ANSYS Workbench简化较少的位置同时网格精细度良好的位置提取应力然后对比,见图6.3A/6.3B,两者计算误差32.8%,误差较大。

图6.3A ANSYS Workbench工况四应力云图

图6.3B Simsolid工况四应力云图
通过前面的仿真计算,将结果绘制表7.1
表7.1 计算结果对比
| 计算工况 | ANSYS Workbench | Simsolid | 计算误差 | |
| 工况一 | 位移mm | 5.38 | 5.09 | 5.4% |
| 应力MPa | 76 | 74 | 2.6% | |
| 工况二 | 位移mm | 4.8 | 4.12 | 14.2% |
| 应力MPa | 68.4 | 39.6 | 41.5% | |
| 工况三 | 位移mm | 5.62 | 5.11 | 9.1% |
| 应力MPa | 68 | 54 | 20% | |
| 工况四 | 位移mm | 5.62 | 4.42 | 21% |
| 应力MPa | 64.5 | 43.2 | 32.8% |
从表7.1可以看出:工况一两种软件计算结果最接近;位移误差要小于应力误差;某些工况简化后的模型与实际模型存在较大的计算误差。
由于本计算项目存在大量的杆类和薄壁件,为了加快求解速度,ANSYS Workbench中网格尺寸较大(网格10mm,壁厚2mm),因此计算精度也较低,通过两种软件的对比发现Simsolid在处理这种有大量的薄壁(杆类也可以处理成薄壁模型)件有明显的优势,首先不需要划分细密的网格,其次不用采用混合单元(壳单元、梁单元、实体单元),计算精度基本可以满足工程应用同时求解效率是传统有限元的数十倍,为了更直观的了解Simsolid和ANSYS Workbench计算精度,这里再做一个简单的方管(方管40mm*2mm,长度400mm;载荷200N)悬臂梁对比测试,直接给出计算结果。
ANSYS Workbench两种尺寸网格对应位移:
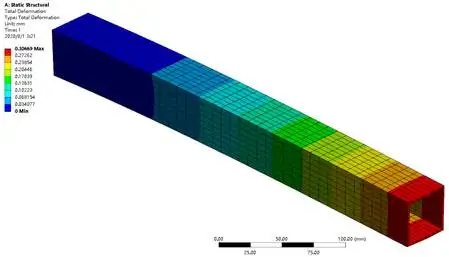
图7.1A ANSYS Workbench网格尺寸10mm位移云图
最大位移:0.307mm

图7.1B ANSYS Workbench网格尺寸1mm位移云图
最大位移:0.308mm
ANSYS Workbench两种尺寸网格对应应力:

图7.2A ANSYS Workbench网格尺寸10mm应力云图
最大应力:28.07MPa

图7.2B ANSYS Workbench网格尺寸1mm应力云图
最大应力:51.41MPa
Simsolid对应位移与应力:

图7.3A Simsolid 6阶位移云图
最大位移:0.294mm

图7.3B Simsolid 6阶应力云图
最大应力:25.2MPa
通过以上仿真对比得出结论:网格的细密程度对位移影响很小,但对应力影响较大,尤其是应力集中的位置;而两种软件在位移分析当中几乎没有太大差距,而在提剔除局部的应力集中后,两软件应力结果差距也不大,再一次证明了Simsolid的精度完全满足工程需求,不过目前该软件分析设置只能做到8阶,对于需要考虑应力集中的位置就会显现出一定的弱点,希望以后进一步改进。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















