















































软件

产品


1 引 言
虚拟样机分析软件ADAMS(Automatic Dynamic Analysis of Mechanical Systems),是对机械系统的运动学与动力学进行仿真计算的商用软件,目前己经被全世界各行各业的数百家主要制造商采用。一个系统通常是由多个构建组成的,各个构件之间的这种约束通常存在某些约束关系,即一个构件限制另一个构件的运动,两个构件之间的这种约束关系,通常称为运动副或者铰链,ADAMS中运动副分为低副、高副和基本副[1] [2],这些运动副对构件的自由度进行约束,ADAMS为每个约束列出一个或多个代数约束方程,在实际中,存在着大量的机构由于人为的带入虚约束而导致过约束的情况[3],有时需要通过引入虚约束来增加系统的刚度[4],在定义运动副过程中,往往会出现过约束及冗余约束的情况,文献[5]分析了过约束问题,文献[6]对凸轮机构的冗余情况进行了分析,用一个点线副和一个平行副的组合来代替滑移副来解决冗余约束,但是没有分析具体方法。
并联机构具有高精度、高刚度、承载能力大和运动反解简单等特点, 成为机器人学者的研究热点[7] ,自由度小于6 的少自由度并联机构, 因其驱动部件少、结构简单、控制成本低等特点, 一直是国际学术界关注的热点和研究的前沿[8-14],交叉型平面二自由度并联机构属于少自由并联机构家族中的一种。本文对运用基本运动副代替低副约束刚体的自由度,同时不出现冗余约束,进行了详细的分析,总结了避免出现冗余约束的技巧,最后以交叉型平面二自由度并联机械手为对象,运用上述方法和技巧,详细介绍了在ADAMS中建立其运动学和动力学仿真模型的具体方法和步骤,为样机开发和实时控制系统的研究提供重要的参考。
2 运用基本运动副约束物体自由度
2.1 运动副的约束关系
一个构件在空间中具有6个自由度,即3个转动自由度和3个移动自由度。不同运动副,限制构件自由度的个数不同,转动副限制构件的5个自由度,只有1个绕转轴转动的自由度
2.2 基本运动副构建圆柱副
对于如图1的长方体,MARKER_1为固结于大地,位置和姿态与原点一致的点,MARKER_2为控制长方体位置和方向的点,姿态和位置与MARKER_1一致, 其在空间中有6个自由度,要实现长方体具有绕X轴转动和沿X轴移动两个自由度,即圆柱副,使其绕Y轴转动、沿Y轴移动、绕Z轴转动以及沿Z轴移动将被限制,主要有以下几个步骤:
1) 添加垂直副约束,限制长方体绕 轴转动,在垂直轴选项中选择2 Bodies-2 Location,实体分别选取长方体和大地,位置分别选取长方体上的Marker_2和大地上的Marker_1,方向选取Marker_1的X轴和Y轴,生成的Marker_3和Marker_4的Z轴与Marker_1的X轴和Y轴一致,如图2,要保证Marker_3与Marker_4的Z轴垂直,长方体绕Marker_1的Z轴的转动将被限制,其只有五个自由度,即绕Marker_1的X、Y轴的转动,和沿Marker_1的X、Y、Z轴的移动.


2) 添加点线副来限制长方体沿Y和Z轴两个移动自由度,在点线副选项中选择2 Bodies-1 Location,实体分别选取长方体和和大地,位置选取长方体上的Marker_1,方向选择X轴,生成的Marker_5和Marker_6的Z轴与Marker_1 X轴一致,如图3,考虑到1)中垂直轴副约束,长方体只有沿Marker_1的X轴的移动,和绕Marker_1的X、Y轴的转动三个自由度.

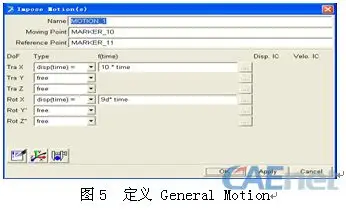
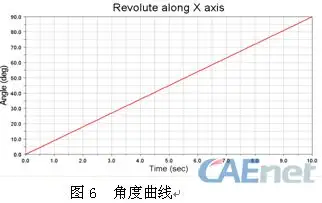
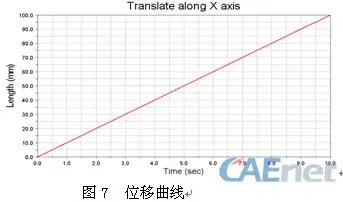
3) 添加垂直轴副来限制长方体绕Marker_1 Y轴的转动,选择2 Bodies-2 Location,实体分别选取长方体和大地,位置分别选取长方体上的Marker_2和大地上的Marker_1,方向选取Marker_1的X轴和Z轴,生成Marker_7和Marker_8的Z轴与Marker_1的X轴和Z轴一致,如图4,要保证Marker_7与Marker_8的Z轴垂直,长方体绕Marker_1 Y轴的转动将被限制,考虑到步骤1)、2),长方体剩下两个自由度,即沿Marker_1 X轴的移动和绕Marker_1 X轴的转动,通过在ADAMS中定义General Motion, 选择2 Bodies-1 Location,实体分别选取长方体和大地,位置选取大地上Marker_1,方向选取Marker_1的Z轴,如图5, 通过仿真测得绕X轴转动角度和沿X轴移动位移的曲线如图6、7 ,表明自由度的个数和方向是正确的.

2.3 基本副创建移动副和转动副
1) 移动副
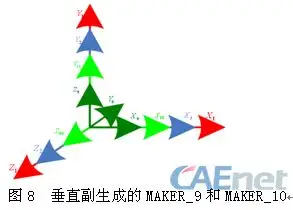
添加垂直副限制其绕X轴转动,长方体只能沿Marker_1的X轴移动,选择2 Bodies-2 Location,实体分别选取长方体和大地,位置分别选取长方体上的Marker_2和大地上的Marker_1,方向选取Marker_1的Y和Z轴,生成的Marker_9和Marker_10的Z轴与Marker_1的Y轴和Z轴一致,如图8,要保证Marker_9与Marker_10的Z轴垂直,长方体绕Marker_1 X轴的转动将被限制,长方体只一个自由度,即沿Marker_1 X轴的移动,通过在ADAMS中定义General Motion仿真验证可知,自由度的个数和方向是正确的.
2) 转动副
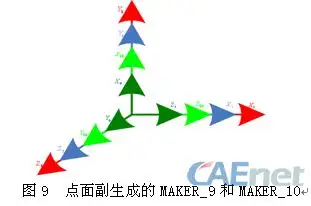
添加点面副来限制其沿X轴移动,使长方体只能绕Marker_1 X轴转动,选择2 Bodies-1 Location,实体分别选取长方体和大地,选取大地上的Marker_1,方向选取Marker_1的X轴,生成的Marker_9和Marker_10的Z轴与Marker_1的X轴一致,如图9,长方体绕Marker_1的X轴的移动将被限制,其只剩下了一个自由度,即绕Marker_1 X轴的转动,通过在ADAMS中定义General Motion仿真验证可知,自由度的个数和方向是正确的.
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















