软件

产品


摘要:
为了准确获知电控空气弹簧式麦弗逊悬架代替螺旋弹簧麦弗逊悬架的可行性,开展了台架示功试验,得出了空气弹簧力学特性曲线和不同电流下阻尼特性曲线。应用MATLAB 与ADAMS/Car仿真软件,建立了整车动力学模型和C级路面模型,进行了电控空气弹簧式麦弗逊悬架和螺旋弹簧麦弗逊悬架的仿真计算,完成了整车行驶平顺性仿真研究。研究结果表明:用电控空气弹簧麦式悬架代替螺旋弹簧麦式悬架优势明显。此方法可为空气弹簧和电控悬架的研究提供一定的基础。
关键词:空气弹簧;电控悬架;示功试验;阻尼特性;行驶平顺性
引言
汽车悬架系统的减振效果对整车的行驶平顺性、操纵稳定性和通过性等多种使用性能有着很大的影响[1-2]。相比传统的定刚度定阻尼的被动式悬架,空气悬架有其独特优点[3-4]:
1)空气悬架刚度低,装备空气悬架的车辆可以获得较低的固有频率,行驶平顺性好,乘坐舒适性好,能够延长车辆的使用寿命,减轻车辆对路面的破坏;
2)空气悬架刚度是非线性且可调节,刚度随着车辆载荷的变化而变化,能够有效限制振幅、避开共振、防止冲击,空载和满载的固有频率基本保持不变。另外,车身姿态急剧变化时,可以使弹簧变硬,以抑制车身姿态的变化;
3)空气悬架高度可调,不论是否载重,载重是否均匀,车身均可在一定高度保持水平。通过加装升降控制装置还可实现车身的升降功能,从而提高车辆的通过性,利于物流运输的货车上下货物或方便乘客上下车;
4)空气悬架质量轻,能吸收高频振动,隔音性能好,寿命长。由于空气悬架有诸多优点,把空气弹簧的可调刚度特性与筒式减振器可调阻尼的特性结合起来,借助电液技术、计算机技术、传感器微处理以及电液控制单元制造技术,发展电控空气悬架技术具有非常大的应用前景[5-6]。
因此,对电控空气弹簧麦弗逊悬架代替螺旋弹簧麦弗逊悬架的可行性问题进行研究对整车结构的改进也具有理论指导意义。本文针对平顺性仿真计算,对电控空气弹簧麦弗逊悬架和螺旋弹簧麦弗逊悬架进行比较分析和可行性验证,此研究可为整车结构的改善和空气悬架控制策略的研究提供一定的理论基础。
1 电控空气悬架工作原理和性能试验
1.1 系统组成与工作原理
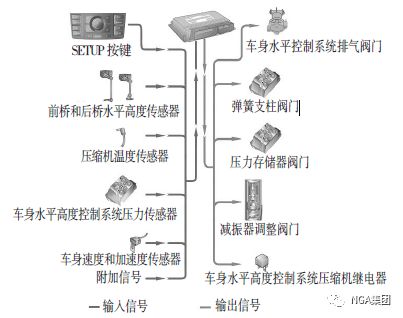
电控空气悬架主要由控制单元、空气弹簧、减振器、传感器组、空气供应机组、电磁阀组、蓄压器等组成。系统控制原理如图1所示。
图1 系统控制原理图
驾驶员通过操纵控制面板(SETUP)来定义控制器的控制模式,前桥和后桥水平高度传感器用来收集车身底盘高度。汽车在静止状态下,根据不同的控制模式,系统有不同的默认水平高度。
当汽车空载或者满载时,车身会被提高或降低,车身水平高度传感器产生信号给控制器,控制器根据信号的不同产生控制信号来控制压缩机和阀系对空气弹簧进行放气或者充气,以维持车身在固定的水平高度上。
而当汽车在运动状态下行驶在越野路面上时,可以通过水平高度传感器的信号来控制压缩机充气以提高车辆的通过性。车身速度和加速度传感器用来收集车身纵向速度和垂向、纵向、侧向3 个方向上的加速度,根据车身纵向速度的大小和速度维持时间的长短以及3个方向的加速度的大小来控制空气弹簧的刚度和减振器的阻尼,以达到最好的平顺性效果。
压缩机温度传感器反馈压缩机的温度,防止过热。附加信号主要包括车门、行李箱等的接触信号,保证行驶中的安全性。所有传感器产生的信号都要经过控制单元的分析、判断,然后根据控制策略产生控制信号控制执行装置进行调控。
1.2 性能试验与结果
本文研究的电控空气悬架系统如图2所示。
图2 电控空气悬架系统
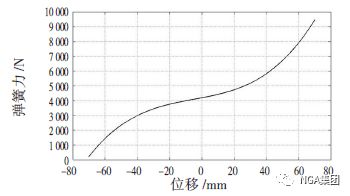
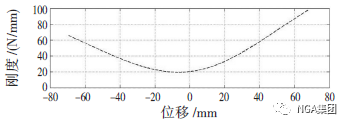
用空气加压装置给空气弹簧充入0.6MPa的氮气,调节稳压电源的电流为1.8A,此时阻尼孔开阀为最大的状态,空气弹簧力学特性曲线图如图3所示。
图3 空气弹簧力学特性
从图3中可以看出,空气弹簧作用力与位移的曲线表现出了非线性特性,而且在位移为零的位置刚度比较小,在两端位置比较大。
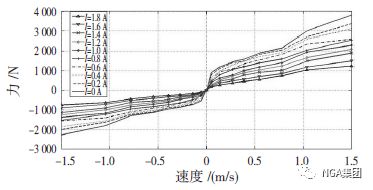
不同电流下减振器阻尼特性曲线如图4。
图4 不同电流下减振器阻尼特性
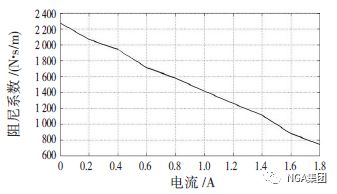
不同电流下减振器等效线性阻尼系数如图5。
图5 不同电流下减振器等效线性阻尼系数
从图4和图5中可以看出,通过调节电流,在相同速度点上阻尼力有明显的变化,可以很好地改善汽车的平顺性。
通过上面的分析,对试验所得数据进行了适当的处理,最终得到了弹簧力- 位移数据和不同电流条件下的阻尼力- 速度数据,将这些数据输入到ADAMS/Car 属性文件中,即可为整车仿真提供汽车悬架系统的主要特性参数。
2 整车系统建模
汽车是一个多自由度的“质量- 刚度- 阻尼”系统,汽车行驶在不平的路面上,路面产生的振动经轮胎、悬架系统、座椅等最终传递到人体上。整车虚拟模型的建立,既要保证运动系统的准确性,又要对和主要研究目标影响不大的因素进行简化,以提高运算仿真的速度[7-8]。本文主要进行的是整车的行驶平顺性仿真分析,应用ADAMS/Car进行建模时,进行了如下假设:
1)将车身简化为一刚体,并集中质量于底盘上,通过改变车身质量来修改整车质量。
2)把动力总成简化为一个刚体,并集中质量于底盘。
3)考虑轮胎的弹性特性和悬架的缓冲、减振作用,把具体的零部件(如转向节、下摆臂)视为刚体。
整车建模过程中,需要输入各组件的特性参数。表1列出了某款汽车一些主要技术参数。
表1 整车主要技术参数
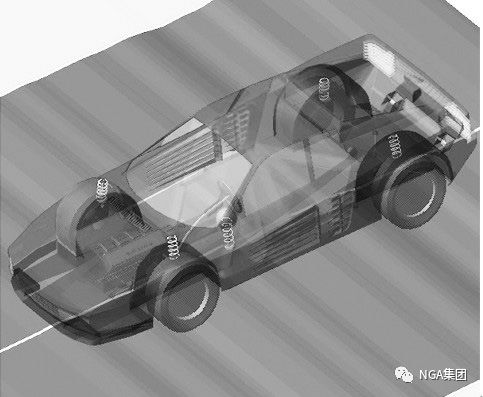
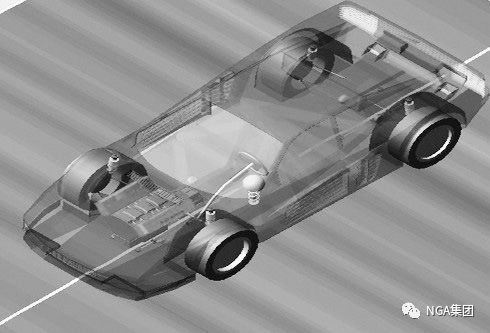
经过简化,最终的整车系统主要包括以下几个部分:底盘模型、车身模型、动力总成模型和C级路面模型。本文主要对整车进行平顺性仿真,因而需要建立整车模型,通过添加橡胶衬套和其它约束元件,即可将上面的子系统进行装配,建立适用于仿真的整车模型,如图6和图7所示。
图6 螺旋弹簧麦式悬架整车系统
图7 电控空气弹簧麦式悬架整车系统
3 整车平顺性仿真计算
3.1 整车平顺性仿真结果评价指标
汽车平顺性主要是保持汽车在行驶过程中产生的振动和冲击对乘员舒适性的影响在一定的界限内,因此,平顺性主要是根据乘员主观感觉的舒适性来评价的,对于载货汽车还包括保持货物完好的性能,它是现代汽车的主要性能之一[9-10]。对于悬架系统,我们在评价其性能时,通常有3个评价指标是需要考虑的:
1)车体质心的垂直振动加速度。反映了乘员乘坐舒适性和车体振动环境,该值越小,舒适性越好。
2)悬架系统的动挠度。即车轮相对于车体垂直跳动的动位移。对于汽车的悬架系统,其动挠度是有限的,当悬架系统的动挠度超过系统许用动行程[ fd] 时,就会出现悬架弹簧撞击限位器,此时称为“悬架击穿”。为使汽车“悬架击穿”的概率极小(0.3% 以下),则要保证悬架动行程的均方根值σf ≤ [ fd]/3,本文取fd=70mm,即要保证σf ≤ 23.3 mm。
3)车轮的动载荷。该指标的大小主要用来衡量车轮的抓地能力,反映了高速车辆的行驶安全性。为了使车轮跳离地面的概率极小(小于0.3%),要保证车轮动载荷的均方根值σd ≤ [ Gj] /3,Gj 为车轮静载。本文经过静平衡分析可得满载状态下:双前轮静载Gfj=3924N,则σfd ≤ 1308 N; 双后轮静载Gij=4169N, 则σrm ≤ 1390N。
3.2 电控空气弹簧麦式悬架与螺旋弹簧麦式
悬架刚度仿真结果对比
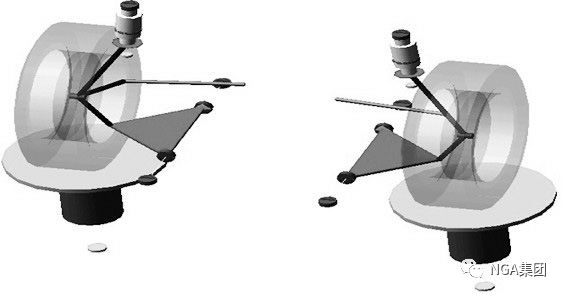
对空气悬架前后悬架分别进行双轮同向激振,在平衡位置±70mm,在ADAMS/Car 软件中建模如图8所示:设定前悬架单侧簧载质量为400kg,后悬架簧载质量为425kg, P=0.6MPa,通过仿真,可以测得前、后悬架刚度曲线如图9、图10所示。
图8 空气弹簧麦式悬架双轮同向激振模型
图9 空气弹簧麦式悬架前悬架刚度曲线
图10 空气弹簧麦式悬架后悬架刚度曲线
通过图9、图10可以看出,在静平衡位置时,空气悬架前悬架刚度为kf=20kN/m,后悬架刚度为kr=25kN/m。
同理,对螺旋弹簧麦式悬架系统进行双轮同向激励仿真,经过多次仿真调试,可求得在静平衡位置时,当前悬架螺旋弹簧的刚度ksf=23kN/m、后悬架螺旋弹簧的刚度为ksr=30kN/m 时,才能使螺旋弹簧麦式悬架的前悬架刚度为kf=20kN/m,后悬架刚度为kr=25kN/m。
3.3 电控空气弹簧麦式悬架与螺旋弹簧麦式
悬架平顺性仿真结果对比
1)仿真条件
① 电控空气弹簧麦氏悬架特性曲线为P=0.6MPa的弹簧特性曲线,阻尼特性为I=1.0A;螺旋弹簧麦式悬架的前悬架螺旋弹簧刚度kf=23kN/m,后悬架螺旋弹簧刚度kr=30kN/m,阻尼特性为I=1.0A;
②两种悬架车辆的其他参数相同;
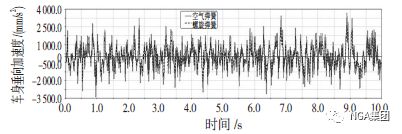
③车辆在满载的状况下以70 km/h 的车速在C 级路面上直线行驶10 s。
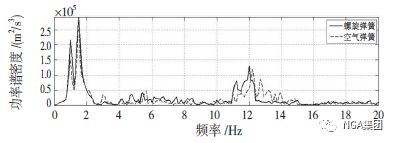
2)车身垂向加速度对比和功率谱密度对比分别如图11、图12所示。
图11 C级路面车身垂向加速度对比
图12 C级路面车身垂向加速度功率谱密度对比
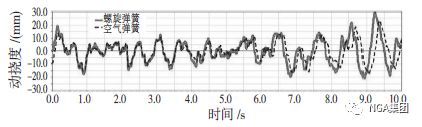
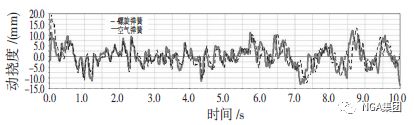
3)前、后悬架动挠度对比如图13、图14。
图13 C级路面前悬架动挠度对比
图14 C级路面后悬架动挠度对比
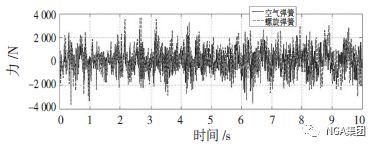
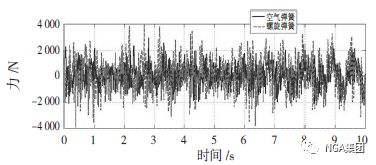
4)前、后车轮动载荷对比如图15、图16。
图15 C级路面前轮动载荷对比
图16 C级路面后轮动载荷对比
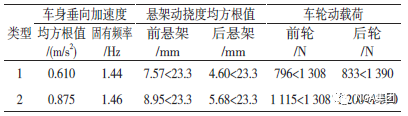
表2 电控空气弹簧麦式悬架
(类型1)与螺旋弹簧麦式悬架
(类型2)行驶平顺性3种指标对比汇总
4 结论
1)电控空气弹簧麦式悬架与螺旋弹簧麦式悬架3个评价标准相比:加权均方根值小30.3%, 前、后悬架动挠度均方根值分别小15.4%、19.0%, 前、后车轮动载荷分别小28.6%、30.6%。故从汽车行驶平顺性角度来说,用电控空气弹簧麦式悬架代替螺旋弹簧麦式悬架优势明显。
2)综合两种类型悬架的优缺点,考虑到人们对乘坐舒适性和行驶安全性的要求越来越高以及减振器的成本问题,在减振器制造成本不太大的情况下用空气弹簧麦式悬架代替螺旋弹簧麦式悬架是可行的。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020