















































软件

产品



01引言
为了使悬架的结构设计更合理且更加可靠的使用性能,
利用ADAMS/CAR 建立悬架动力学模型,
根据整车相关参数计算仿真边界条件,
选择单侧凸包、紧急制动、极限转向3种悬架承受较大的工况下进行运动仿真分析。
并且从中提取悬架各铰接点的载荷作为有限元分析求解的边界条件。
利用hypermesh对悬架进行不同工况的强度分析,
研究应力分布情况。
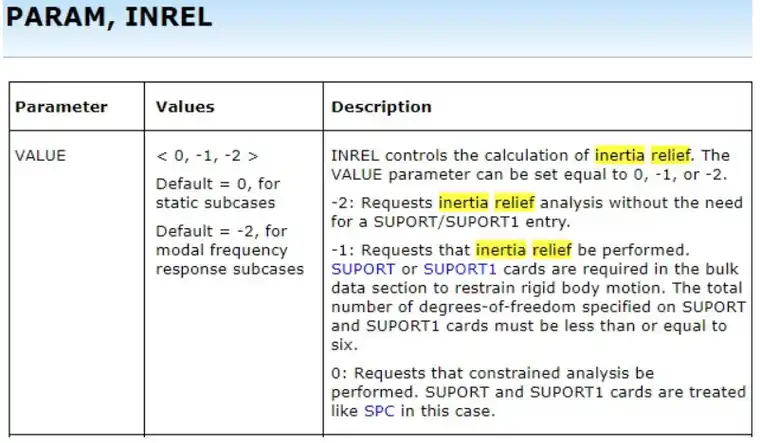
02惯性释放原理
惯性释放典型应用与模拟飞机的飞行、
汽车在试验场的行驶以及卫星在太空中的遨游等实际工程应用。

惯性释放的原理是先计算不平衡外力作用下结构的运动(加速度),通过惯性力构造一个平衡的力系,
使得支座反力等于零,
可以消除不适当的约束对变形和应力状态的影响,
求解得到的节点位移其实是描述所有节点相对于该支座的相对运动,
从而消除了因为直接对支座进行约束时产生的约束端附近的应力集中。
知识拓展 在牛顿定律的基础上,引人惯性力的概念,可以导出研究非自由质点系的另一种方法——动静法。 动静法以我们熟悉的静力学方法研究非自由质点系的运动学问题, 使动力学问题求解之动力学方法更易于掌握。 并且由于方法上的改进使得“动”“静”相通,产生了理论上的飞跃。
03主要学习的内容
1、利用ADAMS/CAR 自带的麦弗逊悬架,根据下摆臂硬点建立简化版下摆臂。
2、在hypermesh进行网格划分、材料编辑、属性编辑。
3、在hypermesh建立局部坐标系,使坐标系与adams/CAr中建立的marker坐标系相同,介绍右手法则。
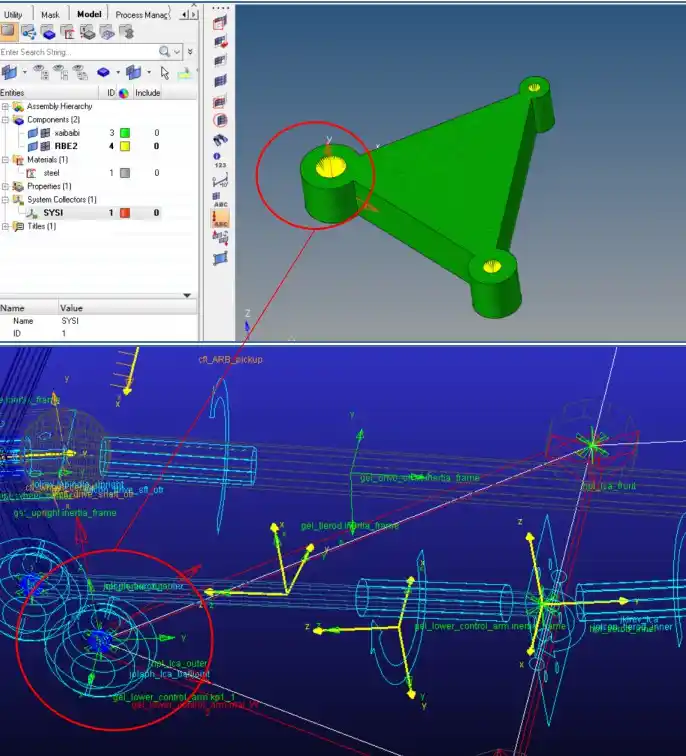
4、根据adams/CAR中提取的载荷,在hypermesh中建立相应的载荷。
5、设置卡片信息,主要是惯性释放设置。
6、建立载荷步,使用OptiStruct提交计算。
以下内容step by step介绍了整个操作流程。
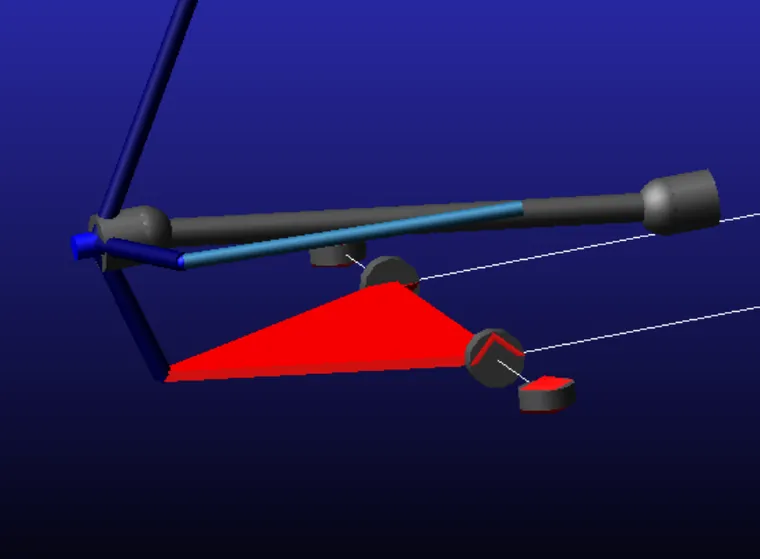
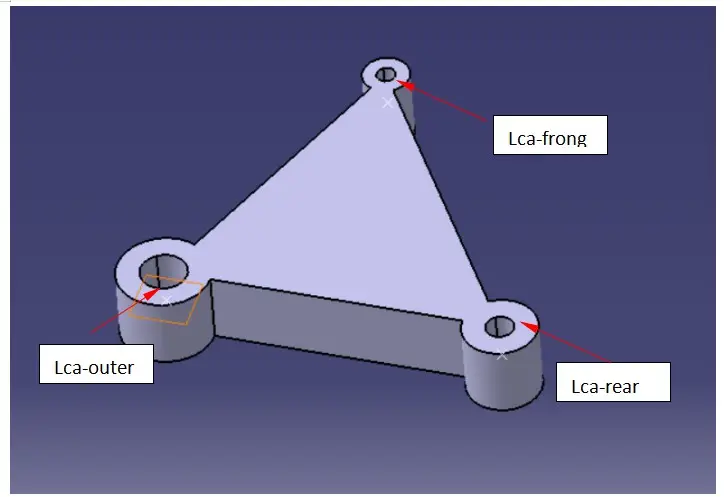
1、建立下摆臂数模
使用Adams/ car自带的麦弗逊悬架建立下摆臂总成。
下摆臂总成硬点信息。

在CATIA中建立硬点,并建立下摆臂数模。
建立数模如下,本次建模没有实际工程意义,只是用于说明惯性释放法的操作流程。
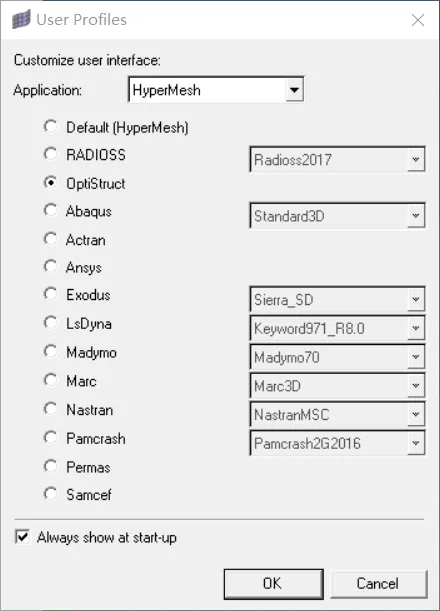
2、使用hypermesh进行前处理
软件版本HyperMesh 2017 OptiStruct
打开hypermesh 选择OptiStruct。
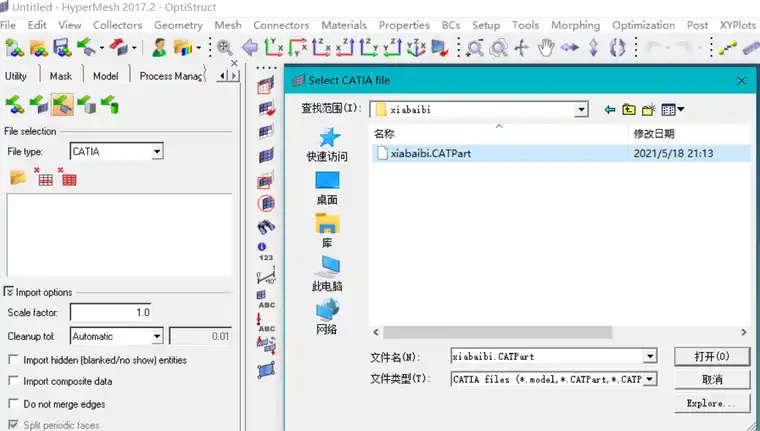
导入几何文件
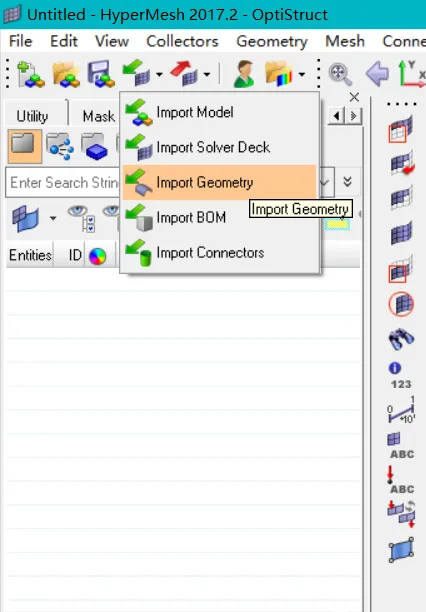
导入我们建立的“xiabaibi”数据。
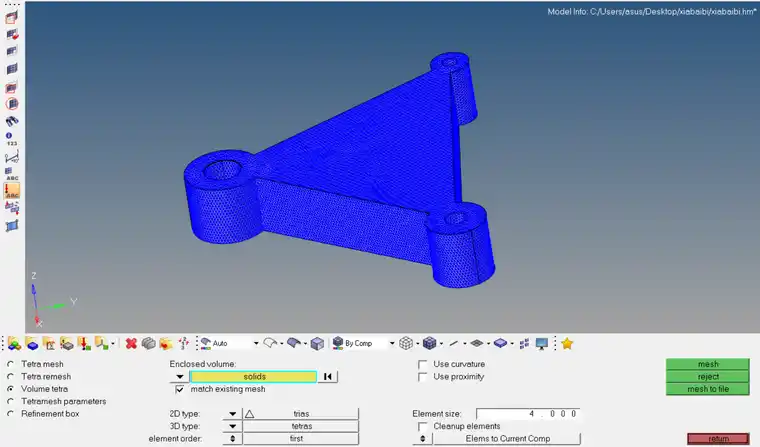
使用3D-Teramesh进行网格划分

网格大小设置如下

网格划分效果图
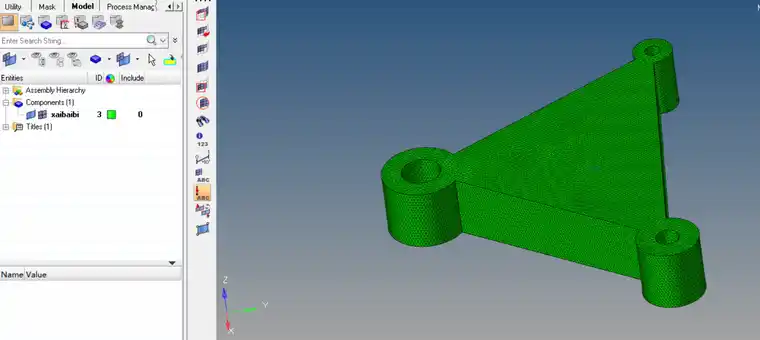
将Components命名为“xiabaibi”。
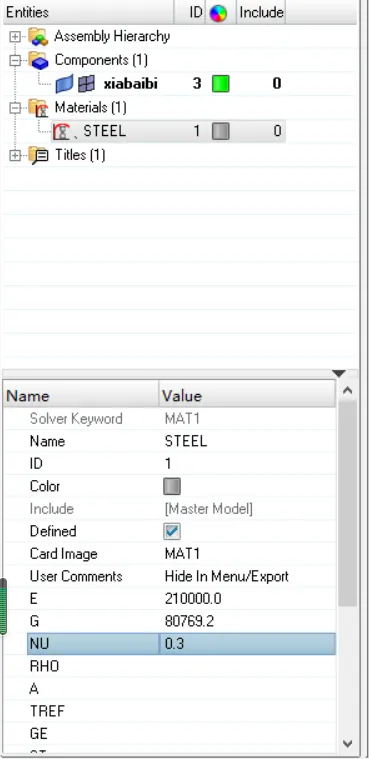
材料设置

材料属性请查阅相关手册,这里我们随便输入的参数。
建立属性

赋予部件属性

免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















