















































软件

产品


案例概述
绝大多数机器人是通过使用测量关节旋转的编码器来控制的。即便使用了超高精度的编码器,机器人移动到绝对 XYZ 位置以及 ABC 方位的能力仍然受挠度、热膨胀及制造变化的限制。某些应用(例如放置磁盘驱动器的读出磁头)需要极高的定位精度,只能由价格高昂的专用机器人来完成。视觉伺服技术可以解决这一难题,它通过视觉系统获取图像,可确定机器人末端执行器和目标的相对位置。机器人控制器可生成运动指令,让末端执行器朝目标方向移动。视觉系统获取新的图像,然后由机器人控制器相应地更新其运动指令。这一过程反复进行,直至视觉系统确定机器人的末端执行器已到达预定位置。视觉伺服可达到数微米的放置精度,无需使用极其昂贵的机器人。
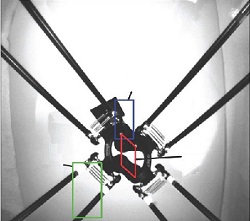
如果既不能将视觉系统安装在末端执行器上,也无法获取末端执行器的图像,应用就会变得复杂。例如,金属切削工具的末端执行器通常埋在工件中,并有可能被切屑和冷却剂进一步遮蔽。对于这类应用,可采用替代方式来获取机器人腿部的图像,并利用这些图像来控制末端执行器的位置。IRCCyN 的研究人员开发了一种视觉伺服系统,可根据对并联机器人腿部的观测情况来控制并联机器人。并联机器人由若干个并列组装的支腿组成,并将机器人底座与末端执行器相连。它采用几个线性或旋转作动器,各个作动器之间的位置相互独立,以支持末端执行器。与之相反,串联机器人设计有一系列由电机作动关节相连的链环。可将这种方式应用到数种型号的并联机器人上,例如 Adept Quattro 以及同一产品系列的其他机器人。
挑战
但在某些情况下,当机器人的支腿按预期方式移动时,末端执行器不会终止于预期的位置。显然,这一行为是由视觉系统的观测结果与现实世界之间的映射造成的,但此时无法了解映射的属性,也没有能够分析这种关联性的工具。IRCCyN 的研究人员发现,可通过视觉伺服实况来解释这一问题。其根据是,支腿的观测结果相当于控制隐藏在控制器中的另一个机器人,其装配模式和独立形态均不同于实际使用的机器人。
隐性机器人是一种虚拟机器人,其运动学特性可以表征支腿方向空间与末端执行器位置和方位空间之间的映射。研究人员证明,机器人理论采用隐性机器人模型概念后,可充分解释所观测的机器人与预期最终位置和方位的潜在不收敛性。IRCCyN 研究人员决定尝试确定一种常规方法,根据支腿的观测结果,针对由视觉伺服所控制的任意类型并联机器人来定义隐性机器人模型。这些研究基于理论计算,但也需要对其理论结果进行验证。
解决方案
IRCCyN 研究人员 Sébastien Briot 指出:“将并联机器人的 Adams 仿真与机器人控制器的 Simulink 模型集成在一起,可获得用来验证我们理论工作的理想平台。”在近期的案例中,IRCCyN 研究人员采用这种理论,根据三种不同的控制原理来定义机器人控制器中的隐性机器人模型。在案例 1 中,仅根据对支腿方向的观测结果来控制机器人。在案例 2 中,机器人控制器还纳入了穿过驱动机器人的圆柱轴的多条线路空间中的部分方向及位置观测结果。最后,在案例 3 中,研究人员进一步加入了穿过机器人支腿线路空间内的完整方向及位置观测结果。
机器人末端执行器的初始形态为 z0 = 0.20 m、Φ0 = -0.90º、θ0 = -0.10º。目标是到达 zf =0.40 m、Φf = -0.90º、θf = +0.10º 的末端执行器形态。
将上述三种控制器(案例 1、案例 2 及案例 3)与 Adams 模型集成在一起,以一秒的模型时间为步长对机器人行为进行仿真。案例 1 中的控制器仅基于支腿方向,机器人无法实现最终的末端执行器形态。案例 2 中的控制器基于支腿方向和支腿柱体的坐标,因此机器人可到达最终末端执行器位置,但无法到达正确的方位。最后,案例 3 的控制器包括了支腿方向以及支腿自身的坐标,因此机器人可到达末端执行器的正确位置和方位。IRCCyN 的研究人员还进行了实物实验,与仿真结果非常吻合。
结果/收益
Sébastien Briot 总结道:“隐性机器人模型的概念是一个强大的工具,能够分析一些由视觉伺服团体所开发的控制器的内在特性。Adams 仿真在我们的隐性机器人模型的理论工作验证中起着重要作用。通过 Adams/Controls 将 Adams 与 Simulink 集成在一起,我们无需再写入复杂的方程式来预测并联机器人的动力学特性,同时可以获得图形化结果,让我们能够更加透彻地了解机器人的行为。”
关于 IRCCyN
南特通信与控制研究院(IRCCyN)是一家与法国国家科学研究中心(CNRS)关系密切的科研机构。其宗旨是实现多个领域的创新,其中包括机器人、自动控制、生产理论及图像处理。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















