















































软件

产品


通过代码构建场景自然是最低效的,那么通过图形化界面构建就非常高效了吗?非也!图形化界面构建也是从无到有,虽然不算慢,但也算不得快。Matlab中其实有很多自带的场景,很多时候是可以直接沿用的,或者改用,这样一来,就是最快的。
1、打开场景库的方式
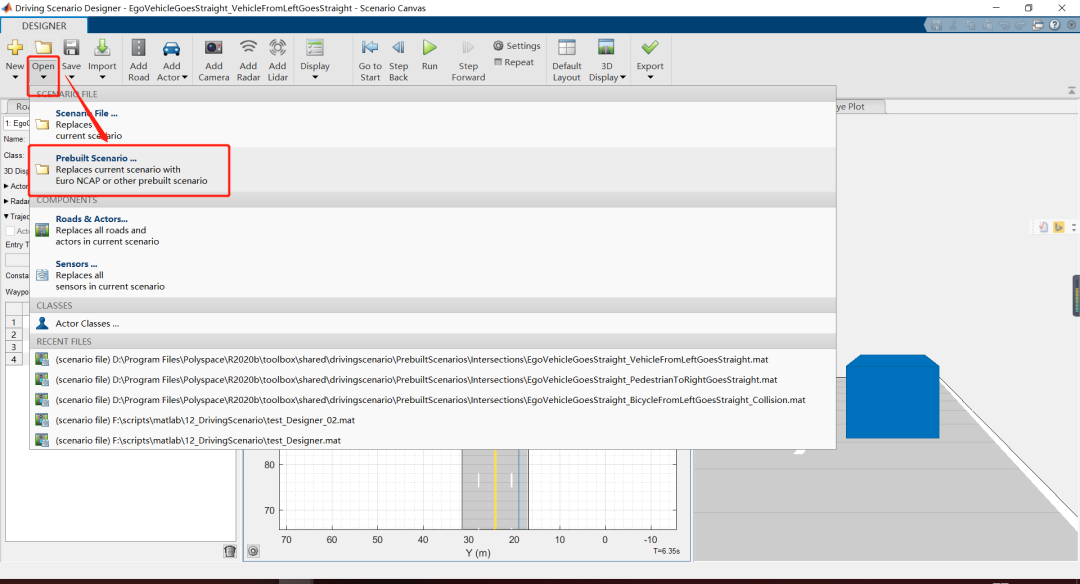
在Matlab命令行窗口中输入代码【drivingScenarioDesigner】,进入驾驶场景设计界面。打开工具栏中的【Open】,选择【Prebuilt Scenario】,如下所示:
然后会出现四个文件夹,如下图所示。其中,【EuroCNCAP】是欧洲新车安全评价规程,乃是自动驾驶安全功能中非常重要的安全测试标准,这当中,自然定义有一些标准驾驶场景。【Intersections】表示十字路口驾驶场景;【Turns】表示转弯场景;【U-Turns】表示掉头场景;
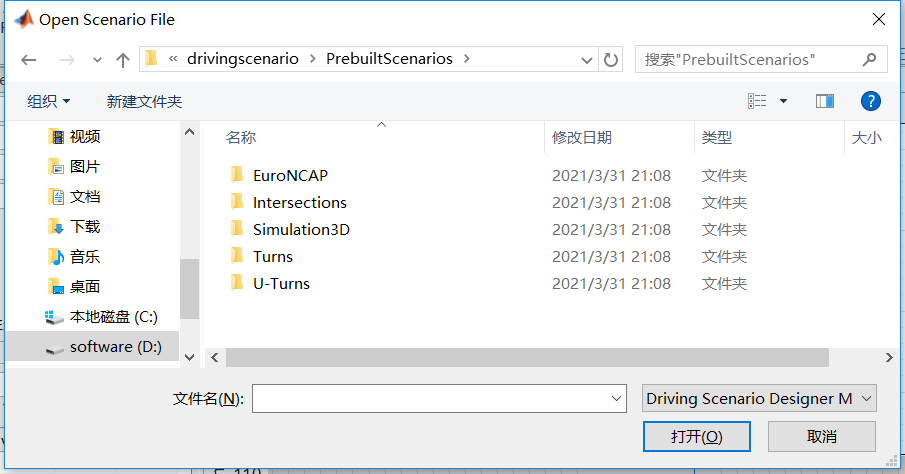
此文,仅打开其中部分场景并运行仿真,旨在揭下所谓“场景”的神秘面纱,助力今后进行各种各样的场景库的创建。
2、十字路口的场景
如下是可选的多种十字路口场景。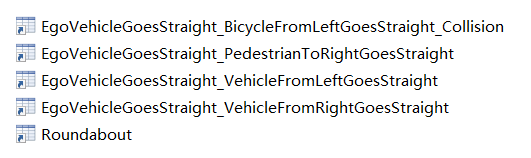
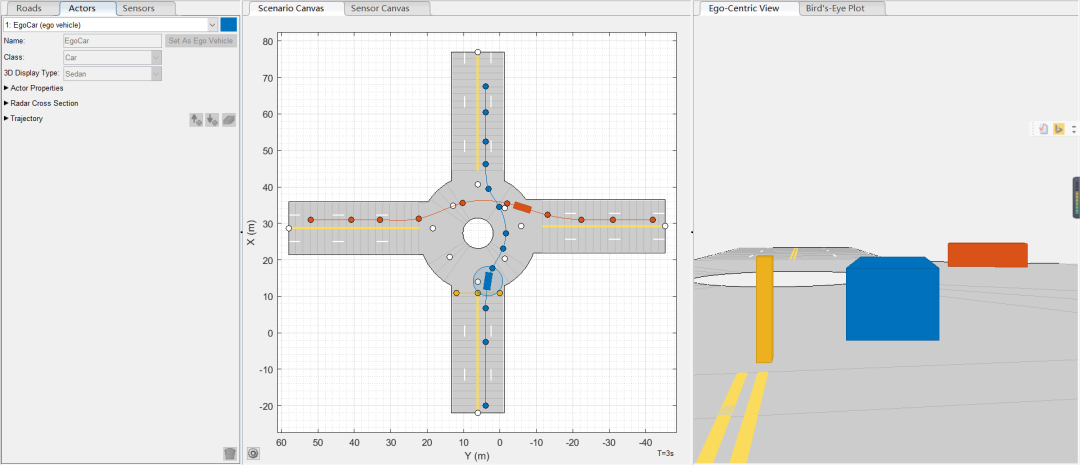
以【Roundabout】为例,主车直行,路口首先有行人穿行,随后绕环道时和横向行驶的另一辆车交错,所有对象都没有停下来,仅通过速度控制即可实现避让。如下所示:
3、车辆转弯场景
如下是可选的多种转弯场景。
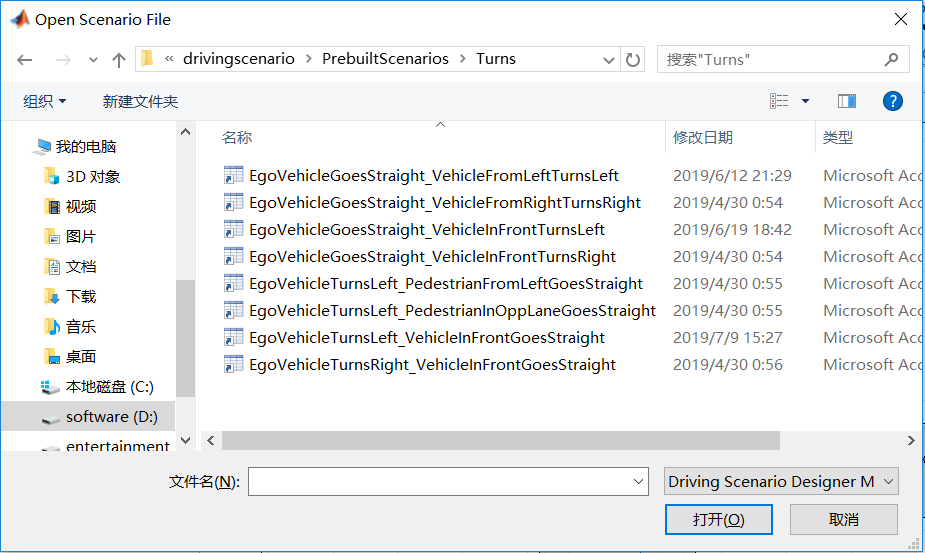
以【EgoVehicleTurnsLeft_VehicleInFrontGoesStraight】为例,主车左转,前行的监控车辆则直行。效果如下:
4、掉头场景
如下是可选的多种掉头场景。
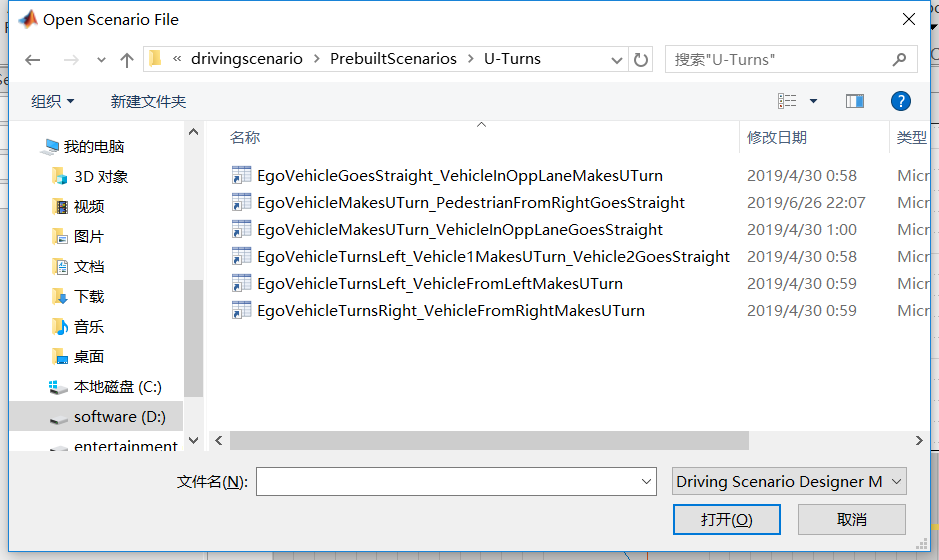
以【EgoVehicleTurnsRight_VehicleFromRightMakesUTurn】为例,主车右转,右转道上碰到正在掉头的车的场景。效果如下:
5、E-NCAP中的测试场景
如下是可选的多种AEB场景。
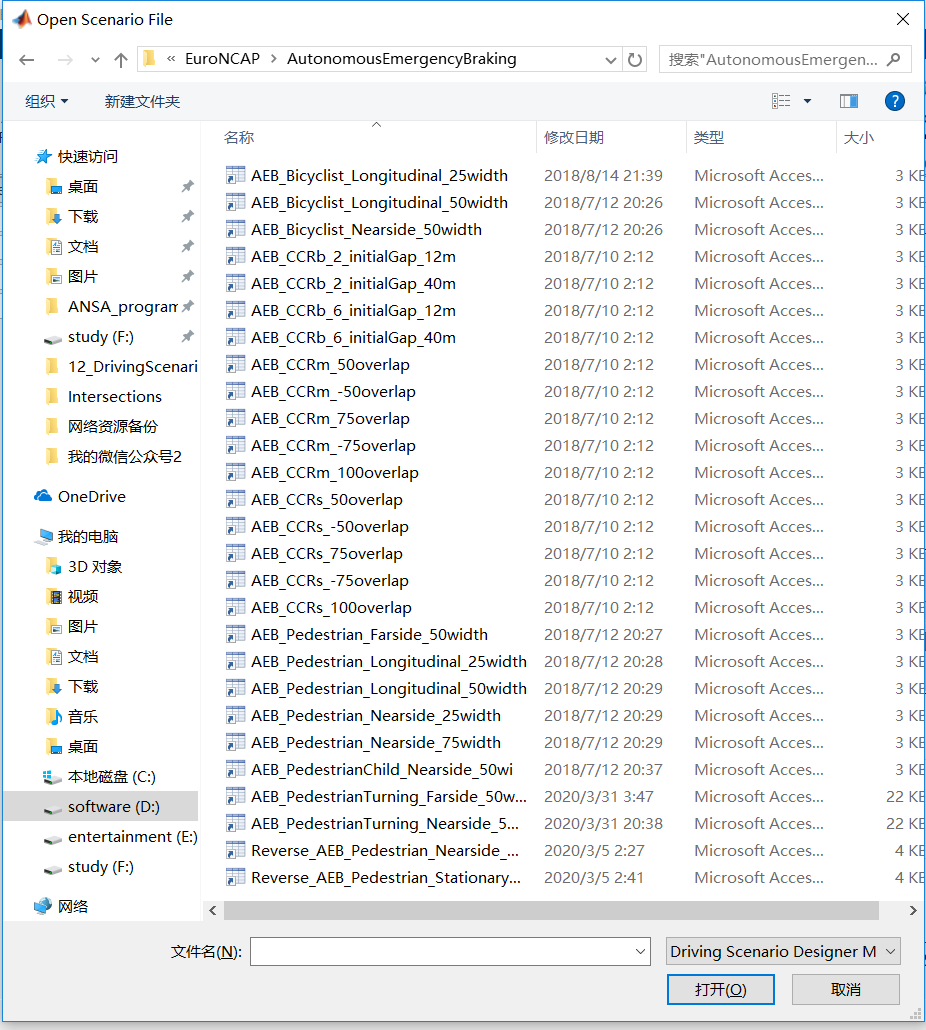
车道保持中有很多关于ADAS的测试项目,比如自动紧急制动测试、比如车道保持辅助测试,每个功能测试下都可能分为很多种细分场景,此处仅展示自动动紧急制动功能,细分场景为主车直行,遇到“鬼探头”的行人案例。如下所示:
本文完。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















