















































软件

产品


版本:Adams2020
Adams仿真过程中不可避免地需要使用外部数据辅助仿真,这里演示导入matlab规划好的数据作为Adams转动副驱动(Rotational Joint Motion)的驱动函数。
前期准备:
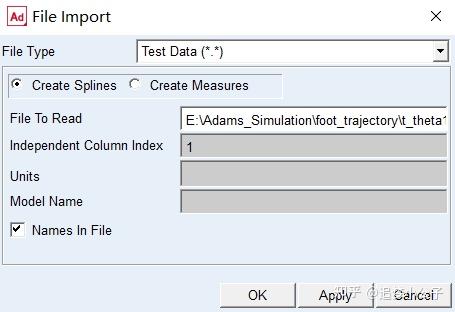
2. 点击菜单栏(界面左上角)的File--->Import,弹出文件导入(File Import)窗口,如下图。
3. 点击模型树(在界面左边)Browse一栏的Elements--->Data Elements,出现刚刚创建的SPLINE_1函数,如下图所示。

SPLINE_1函数
4. 双击SPLINE_1,弹出Modify spline窗口,如下图所示。可以在这里对数据进行调整,同时可以检查数据是否正确导入,可以看出X为时间t,Y为关节转动角度θ;点击右侧的View as,选择Plot,可以将Y关于X的函数画出来,这样更直观。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















